

2880
.pdfРис.4.2
Рис.4.3 |
Рис.4.4 |
Работа привода.
1. Режим пониженной скорости. В этом случае тормоз роторов не ра-
ботает. Катушка 10 отключена от сети, пружина 5 через кольцо 6 отжимает сердечник 8 вместе с диском 11 от накладок 13 роторов. Тормоз центральной шестерни 20 также отключен. Катушка 23 обесточена, пружина 26 прижи-
мает тормозной диск 24 с накладкой 22 к накладке 21 шестерни 20. В ре-
зультате шестерня заторможена, т.е. она не может вращаться в подшипнике
19. Статорная обмотка 18' включена, в короткозамкнутых роторах 14 инду-
цируются токи, которые, взаимодействуя с полем статора, создают моменты,
приводящие роторы 14 во вращение. Роторы вращаются, вращаются и сател-
литы, сидящие на одном валу с ними, и имеющие зубцы 31. Зубцы сателли-
тов входят в зацепление с зубцами шестерни 20, которая заторможена. Са-
теллиты, обкатываясь по шестерне, совершают орбитальное движение, при-
водя во вращение водило 29, которое одновременно является и выходным валом.
2. Режим повышенной скорости - пониженного передаточного отно-
шения. В этом режиме оба тормоза включены, катушки 10 и 23 находятся под током. Катушка 10, втягивая сердечник 8, прижимает диск 11 и наклад-
ками 12 к накладкам 13 ротора 14. В результате оба ротора 14 теряют спо-
собность вращаться вокруг своих осей в подшипниках 30. Оба заторможен-
ных ротора 14 составляют вместе как бы один ротор. Этот составной ротор,
существующий только в режиме повышенной скорости вращается в подшип-
никах 7 диска 11 и в подшипниках 19 колеса 20, и 28 вала 29. Вращение в подшипнике 19 возможно потому, что катушка 23 включена, диск - сердеч-
ник 24 притянут, пружина 26 сжата, а накладка 22 отведена от накладок 21
центрального колеса 20, тем самым освобождая его и давая возможность вращаться в подшипнике 19. Таким образом, передаточное отношение от
"составного" ротора - заторможенных роторов 14 к валу 29 равно 1, вал вра-
щается с подсинхронной скоростью.
При переходе опять на пониженную скорость, катушки 10 и 23 от-
ключены, диск 11 растормаживает роторы, отходя от накладок 13 под дейст-
вием пружины 5, а диск 24 прижимается пружиной 26 к накладкам 22 и 21,
затормаживая тем самым колесо 20. Сателлиты, сидящие на валу 17 начи-
нают совершать планетарные движения, приводя во вращение водило - вал
29 с передаточным отношением планетарной пары.
Режим пониженной скорости иллюстрирует рис.4.3, где показано, что роторы 14 участвуют в двух движениях: собственном вращении и вращении относительно центральной оси вала 29.
Режим повышенной скорости иллюстрирует рис.4.4, где показано, что заторможенные роторы вокруг своих осей не вращаются, а вращаются толь-
ко вокруг центральной оси.
Для улучшения распределения потокосцепления возможно применение шихтованных вставок между роторами, показанных на рис.4.4 и рис.4.3.
На рис.4.5 показан привод, аналогичный предыдущему, но с централь-
ной шестернью не венцового (внутреннего зацепления), а солнечного типа
(внешнего зацепления). Это упрощает ее крепление и исключает реверс при переходе на вторую скорость.
Мотор-редуктор имеет центральный вал 1, установленный в под-
шипниках 2. На валу 1 установлены тормозной диск 3 и солнечная шестерня.
Сердечник тормоза роторов, аналогичный вышеописанному, снабжен диском
4 тормоза колеса и, как обычно, тормозным диском 5 роторов 6. На валу ро-
торов установлены сателлитные шестерни 7, заведенные в зацепление с сол-
нечным колесом 8. Движение передается на выходной вал - водило 9.
Работа устройства в общем аналогична работе выше рассмотренного привода (рис.4.2), но особенностью является двойная функция сердечника тормоза, являющегося элементом, одновременно воздействующим и на тормоз роторов и на тормоз солнечного колеса.

Рис.4.5
Рис.4.6
При переходе, например, на повышенную скорость, при включении тормоза, диск 5 фиксирует роторы 6 от вращения и отводится диск 4 от дис-
ка 5 тормоза шестерни 8, в результате чего шестерня растормаживается и не препятствует фиксации роторов, выходной вал вращается с повышенной скоростью.
На рис. 4.6 показана модификация ротора орбитального привода, вы-
полненного на базе основного ротора 1 и исходного двигателя, в котором просверлены четыре аксиальных канала 2, в каналы помещены роторы 3.
Короткозамкнутая обмотка сохранена на сегментных участках 4 исходного ротора.
Орбитальные машины (в асинхронном варианте) представляют собой обычный статор в комбинации с составным ротором, который в свою оче-
редь, представляет собой несколько роторов, расположенных по окружности.
Существует ряд предложений, относящихся к данной конструктивной схе-
ме, начиная от шарика, перемещающегося по внутренней расточке статора,
и кончая многороторными машинами с внутренним статором. Известны также и комбинации орбитальных машин с планетарными редукторами.
Орбитальные машины, рассматриваемые в данном изложении, имеют ту характерную особенность, что составной ротор выполняет две основные функции. При пониженной скорости составляющие роторы-сателлиты вра-
щаются и вокруг своей оси, и совершают орбитальное движение, реализуя редукцию подсинхронной скорости в планетарном (или волновом) редук-
торе. При повышенной скорости составляющие роторы-сателлиты фикси-
руются относительно своих осей тормозом, но совершают круговое движе-
ние относительно оси выходного вала в качестве стержней беличьей клетки составного ротора, обеспечивая его вращение с подсинхронной скоростью,
причем это вращение передается на вал непосредственно без механической редукции. Механические элементы редуктора при этом растормаживаются.
Краткий анализ рассмотренных конструктивных схем позволяет от-
метить следующие основные особенности орбитального привода.
1. При обеих частотах вращения рабочие роторы вращаются при но-
минальном скольжении.
2. Поток, оцепленный с рабочими роторами меньше номинального из-
за геометрических факторов, в первую очередь - эксцентриситета рабочих роторов и расточки статора.
3. Ротор орбитальной машины, особенно без ферромагнитных вставок
(или базового ротора) обладает магнитной анизотропией, что позволяет рас-
сматривать машину при повышенной скорости как асинхронизированную синхронную.
4. При пониженной скорости, при неактивном базовом роторе
(рис.4.3 и 4.4) орбитальная машина является синхронной.
5. При пониженной скорости и активном базовом роторе (рис.4.6)
асинхронный момент сегментных участков 4 будет развиваться при по-
вышенном скольжении.
6. Если имеется необходимость сохранять направление движения при переходе с одной скорости на другую без изменения порядка чередования фаз, то необходимо применять схему с солнечным колесом (рис.4.5), в
противном случае допустимо использовать венцовое колесо с внутренним зацеплением.
7. Подобные машины могут иметь исполнения и с волновым редук-
тором и роликовым генератором волн, а также с двумя концентрическими статорами, в кольцевом зазоре которых располагаются роторы, что позволяет отказаться от фиксатора роторов.
8. Увеличение числа впадин в основном роторе, вызванное необ-
ходимостью размещения планетарных роторов вызывает увеличение числа высших гармоник поля, приводящее к провалам в кривой вращающегося момента. Эта же причина может вызвать такую суперпозицию статорного и роторного полей, которая создает асимметричное поле, и как следствие, од-
ностороннее магнитное притяжение, вибрацию, шум и тормозящее действие. 9. С технологической точки зрения следует различать полностью со-
ставной ротор, набранный на основе самостоятельных роторов - сателлитов
(рис.4.3 и 4.4), и ротор на основе базового, с пазами, или, вообще меньшего диаметра, дополненный внешними роторами - сателлитами (рис.4.6).
10. Статор унифицирован со статором обычного асинхронного дви-
гателя.
11. Ротор - сателлит также является унифицированным с ротором асинхронного двигателя.
Задача синтеза подобных электромеханических систем начинается с анализа технических требований и технических условий, среди которых осо-
бое место занимает передаточное отношение редуктора, определяющее соот-
ношение между повышенной скоростью - обычно нормированной и опреде-
ляемой числом пар полюсов и пониженной, которая для данных машин мо-
жет быть выбранной любой, а не обязательно кратной числу пар полюсов.
Для простейшей планетарной пары оптимальное передаточное отношение составляет от 3 до 12. Для реализации передаточного отношения от 60 до 80
и выше целесообразно применение волновых редукторов. Промежуточные отношения требуют применения двухступенчатых планетарных пар.
Следующим является установление определенности в том, какой ре-
жим является рабочим, а какой - вспомогательным. Здесь имеют место три основных случая:
1.Основной режим - режим повышенной скорости (грузоподъемные механизмы). Целесообразно применение короткозамкнутых обмоток на сегментных вставках для улучшения энергетики.
2.Основной режим - режим пониженной скорости (например, привод в электрометаллургии). Возможно вообще отсутствие сегментных вставок,
улучшающее отвод тепла от роторов.
3. Оба режима в равной мере являются основными (например, привод

стиральной машины). Данный режим является комбинацией первых двух и допускает, например, присутствие сегментных вставок без токопроводящих обмоток.
Наиболее распространенным и важным с точки зрения практики все-
таки является первый режим. Он является общим для всех асинхронных и асинхронизированных машин, работающих в составе привода с механизмом,
имеющим повышенный, пусковой момент. Известно много конструктив-
ных схем асинхронных двигателей с повышенным пусковым моментом.
Наиболее распространены среди них (для короткозамкнутого ротора) двига-
тели с вытеснением тока - с двойной беличьей клеткой и глубокопазные.
Известно, что кратность пускового момента для таких двигателей со-
ставляет лишь 1,3...1,7, а применение глубокопазных роторов для машин ма-
лой мощности и микромашин практически невозможно из-за малых размеров пазов. Все эти ограничения для орбитальных машин отсутствуют.
Каждый из названных выше трех режимов имеет, как и в любом двух-и многоскоростном приводе, две модификации: постоянного момента и постоянной мощности.
После определения режима и конструктивной схемы производится расчет привода. Его основными этапами являются: геометрический и ком-
поновочный расчет ротора, электромагнитный, тепловой, механический и окончательный проверочный расчеты. Рассмотрим эти этапы подробнее.
1. Геометрический и компоновочный расчеты. Определение главных размеров.
Из рассмотрения расчетной схемы рис.4.7, без учета размера зазоров, из треугольника OAO2, определим отрезок O2A:
O2 A r OO2 sin / n
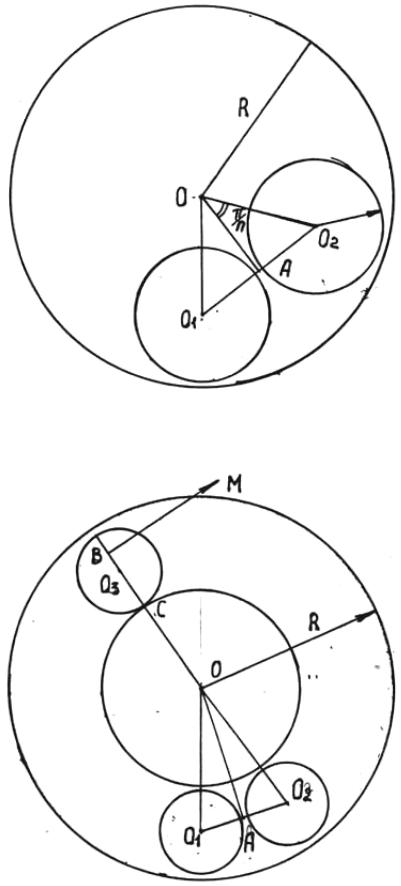
Рис.4.7
Рис.4.8

где:
r - радиус ротора-сателлита, n - число роторов,
с другой стороны:
OO2 R r
где:
R - внутренний радиус внешнего статора,
отсюда имеем:
|
r |
(R |
|
r) sin |
/ n , или: |
||
|
|
|
|
|
sin |
/ n |
|
|
|
r |
|
|
|
R |
|
|
|
1 sin |
/ n |
||||
График функции |
sin |
/ n |
в зависимости от n приведен на рис.4.9. |
||||
|
|
|
|||||
1 sin |
/ n |
||||||
Аналогичная формула справедлива и для случая с внутренним статором
- см.рис.4.8. При заданных R и r можно найти максимальное число роторов:
n  1 arcsin R r r
1 arcsin R r r
Определим соотношение между радиусом основного ротора орби-
тального двигателя R0 и радиусом ротора обычного (исходного) двигателя R
для случая заторможенных сателлитов.
Предположим, что вращающий момент создается лишь на половине окружности сателлита и радиальная сила приложена к половине радиуса r са-
теллита, т.е. общее плечо равно отрезку OВ, причем О3В=r/2 -(рис.4.8) без учета внутреннего статора. Исходя из того, что момент Мисх исходного дви-
гателя пропорционален произведению удельной окружной силы F на радиус ротора, имеем:
Мисх 2 R2 F