

Электрооборудование и электроавтоматика кузнечно-штамповочного производства. Иванов А.В
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский государственный технический университет
А.В. Иванов
ЭЛЕКТРООБОРУДОВАНИЕ И ЭЛЕКТРОАВТОМАТИКА
КУЗНЕЧНО-ШТАМПОВОЧНОГО ПРОИЗВОДСТВА
Утверждено Редакционно-издательским советом университета в качестве конспекта лекций
Воронеж 2003
УДК 621.77.06
Иванов А. В. Электрооборудование и электроавтоматика куз- нечно-штамповочного производства: Конспект лекций. Воронеж: Воронеж. гос. техн. ун-т, 2003. 130 с.
В конспекте лекций рассмотрены вопросы динамики электропривода, виды и типы электроприводов, используемых в кузнечнопрессовом производстве, условия их рационального применения и управлния, а также вопросы электрической безопасности.
Конспект лекций соответствует требованиям Государственного образовательного стандарта высшего профессионального образования по направлению 651400 «Машиностроительные технологии и оборудование», специальность 120400 «Машины и технология обработки металлов давлением», дисциплине Электрооборудование и электроавтоматика кузнечно-штамповочного производства.
Конспект лекций подготовлен в электронном виде в текстовом редакторе MS WORD XP и содержится в файле ЭЭКШП.
Ил. 89. Табл.4. Библиогр.: 6 Научный редактор д-р техн. наук, проф. В. М. Пачевский
Рецензенты: д-р техн. наук, проф. А.Н. Осинцев главный конструктор головного конструкторского бюро
ЗАО «Воронежтяжмехпресс» Ю.А. Дибнер
© Иванов А. В., 2003 © Оформление Воронежский
государственный технический университет, 2003
2
ВВЕДЕНИЕ
Задачи курса - разработка электросхем управления КПО, расчет электродвигателей в приводе основных и вспомогательных механизмов, оптимальный выбор двигателей и других элементов электропривода на основе существующих методик инженерных расчетов, знание вопросов безопасности и экологии при выработке технического решения.
История развития электропривода.
Электрическим приводом называется устройство, состоящее из электродвигателя, аппаратуры управления им, механических передач, связывающих электродвигатель с рабочими органами машины.
Первый электрический двигатель был изобретен русским академиком Б.С. Якоби, который использовал его для привода лодки с питанием от гальванической батареи в 1831 г. Впоследствии русский инженер М.О. Доливо-Добровольский изобрел асинхронный трехфазный двигатель (1891 г.), который в настоящее время является основным электродвигателем в приводах промышленных установок. Эволюция привода: общезаводской паровой привод, общезаводской электрический привод, групповой привод (группа машин приводилась от отдельного электродвигателя), одиночный привод (машина снабжена отдельным электродвигателем), многодвигательный привод (помимо основного главного электродвигателя, регулировка и перемещение вспомогательных механизмов производится отдельными электродвигателями), многодвигательный автоматизированный электропривод (технологический цикл машины обеспечивается автоматическим выполнением производственных операций, когда согласованное движение органов машины выполняется от отдельных электродвигателей, завязанных в общую электрическую схему системой управления).
В общем случае структурная схема современного автоматизированного электропривода следующая (рис. 1).
3
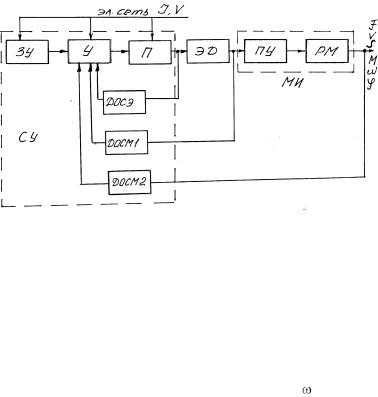
Рис. 1. Схема автоматизированного электропривода
МИ - механическая часть привода, включающая: РМ - рабочий механизм; ПУ - передаточное устройство, предназначенное для передачи от электропривода механической энергии к исполнительному органу (при этом возможно изменение вида, скорости, усилия или момента движения, например, редуктор).
ЭД - электродвигательное устройство, состоящее из: ЭПМ - электромеханический преобразователь, преобразующий электрическую мощность в механическую; РД - масса ротора двигателя, на которую воздействует момент М с угловой скоростью .
СУ - система управления, состоящая из: ЗУ - задающего устройства, например, командаппарат или прогр. упр ; У - управляющее устройство; П - преобразователь для питания двигателя и создания управляющего воздействия. Он преобразует род тока или напряжение или частоту, подводящую к двигателю; ДОСЭ - датчик обратной связи электрический; ДОСМ 1, 2 - датчики обратной связи (механические).
Устройство, управляющее преобразователем, получает командные сигналы от задающего устройства, а информацию о текущем состоянии электропривода и технологического процесса от датчиков обратных связей. С помощью этих датчиков ток, напряжение двигателя, а соответственно скорость, момент или усилие на рабочем органе преобразуются в пропорциональные этим параметрам электрические сигналы, которые и подаются в управляющее устройство. В нем текущее состояние электропривода и технологического процесса сравнивается с заданным и при наличии рассогласования
4

вырабатывается управляющий сигнал, воздействующий через преобразователь на электропривод в направлении устранения возникшего рассогласования.
Подобные схемы управления и электропривода заложены в основу, как обрабатывающих штамповочных центров в мелкосерийном производстве, так и автоматических штамповочных линий используемых в серийном и массовом производстве. Такое современное кузнечно-штамповочное оборудование включает большое число электроприводов, объединенных сложной системой управления, обеспечивающей интенсивный режим работы, логическую бесперебойную последовательность управления многочисленными механическими, пневмо- и гидроцилиндрами, электрическим устройствами.
1. ОСНОВНОЕ УРАВНЕНИЕ ДВИЖЕНИЯ ПРИВОДА
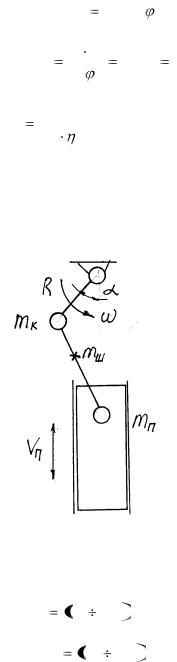
Обычно двигатель приводит в действие исполнительный механизм через систему передач. Применительно к кривошипному прессу это представлено на (рис. 2):
Рис. 2. Схема привода кривошипного пресса
При решении практических задач по расчету электропривода упругостью валов, деформациями и зазорами в зубчатом зацеплении
5

обычно пренебрегают, то есть механические связи принимают абсолютно жесткими. Для клиноременной передачи упругую деформацию учитывают коэффициентом упругого скольжения для клиноременных передач (обычно Sкл = 0,01).
Характер движения электропривода описывается уравнением моментов:
М д |
М с |
Y |
dw |
, |
(1) |
|
dt |
||||||
|
|
|
|
|
где М д - момент, развиваемый двигателем;
Y - момент инерции всех движущихся частей, приведенный к валу двигателя;
dwdt - ускорение или замедление угловой скорости вращения ротора двигателя.
Момент двигателя считается положительным, если он направлен в сторону движения привода при выполнении производственного цикла. Если он направлен в обратную сторону, то считается отрицательным. Электродвигатель при этом работает в тормозном режиме.
Знаки моментов сопротивления также определяются в зависимости от того, какое направление эти моменты имеют по отношению к скорости движения частей привода и рабочего инструмента. Моменты, направленные против скорости, то есть препятствующие движению считаются отрицательными. Моменты, совпадающие с движением, то есть способствующие движению считаются положительными.
Моменты сопротивления бывают активные и реактивные. К активным относятся моменты от сил тяжести, действия упругих сил. К реактивным относятся моменты от сил трения, сопротивления деформации, сопротивление перемещению.
Инерционный или динамический момент М и |
Y |
dw |
|
прояв- |
|
dt |
|||||
|
|
|
|||
ляется только во время переходных режимов, когда изменяется скорость привода. При ускорении этот момент направлен против движения, а при торможении он поддерживает движение. Инерционный
6

момент, как по значению, так и по знаку определяется алгебраической суммой моментов двигателя и момента сопротивления.
С учетом сказанного в общем, виде уравнение движения привода будет:
М д М с |
Y |
dw |
. |
(2) |
|
||||
|
|
dt |
|
|
2.ПРИВЕДЕНИЕ МОМЕНТОВ СОПРОТИВЛЕНИЯ
ИМОМЕНТОВ ИНЕРЦИИ К ВАЛУ ЭЛЕКТРОПРИВОДА
Для того, чтобы пользоваться одним уравнением движения независимо от числа и вида передаточных звеньев в механизме электропривода, все моменты инерции, моменты сил сопротивления и движущие моменты приводятся к одной скорости. Обычно ею является скорость вала электродвигателя. Таким образом, все звенья механизма заменяют одним эквивалентным звеном, для каждого составляют одно уравнение движения.
Динамические свойства эквивалентного звена будут такими же, как и механизма, если кинематическая энергия эквивалентного звена равна кинематической энергии всех звеньев механизма.
|
Y w2 |
|
|
|
w2 |
|
|
|
|
w2 |
|
|
w2 |
|
|||||||
|
э э |
Y |
|
э |
|
Y |
|
|
1 |
|
... Y |
|
|
n |
, |
(3) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
2 |
|
|
дв |
|
2 |
1 2 |
|
n |
2 |
|
|
|
|
||||||||
где Yдв , wд - момент инерции и угловая скорость вала двигателя. |
|
||||||||||||||||||||
Если приводим к валу двигателя, то wэ |
|
wд , тогда: |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
||||||||
|
Yэ |
Yдв |
|
Y1 |
|
w1 |
|
|
|
|
|
... Yn |
wn |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
. |
(4) |
|||||||||
|
|
|
w |
|
|
|
|
|
w |
||||||||||||
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
д |
|
|||
Учитывая, что |
|
wд |
|
i1 i2 ... |
|
in , тогда |
|
|
|
|
|
|
|
||||||||
|
wn |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Y |
|
Y |
Y |
1 |
... Y |
|
1 |
. |
(5) |
||||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
э |
|
д |
|
|
1 i 2 |
n i 2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
n |
|
||||||
7
Приведение масс движущихся поступательно, производится также на основании равенства запаса кинематической энергии.
mv 2 |
w2 |
|
v |
2 |
|
||
|
|
|
|||||
|
Y |
д |
; Y m |
|
. |
(6) |
|
2 |
2 |
wд |
|||||
|
|
|
|
||||
Таким образом, если механизм имеет вращающиеся и поступательно движущиеся элементы, то суммарный приведенный к валу двигателя момент инерции будет:
|
|
|
1 |
|
v |
2 |
|
|
Y |
Y |
...Y |
m |
. |
(7) |
|||
|
|
|||||||
э |
д |
i |
i 2 |
|
wд |
|
|
|
|
|
|
i |
|
|
|
|
2.1. Приведение моментов сопротивления к валу двигателя
Производится на основании энергетического баланса системы. Используя принцип равенства работ на бесконечно малых перемещениях:
М с d |
i |
М дв |
дв , |
|
|
|||
М дв |
М с |
|
i |
|
М с |
. |
(8) |
|
|
дв |
i |
||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
С учетом КПД передаточного момента: |
|
|
|
|||||
М дв |
|
М с |
. |
|
|
|
(9) |
|
|
i |
i |
|
|
|
|||
|
|
|
|
|
|
|
||
При наличии нескольких передач между двигателем и механизмом с передаточными числами i1; i2; ... ii и соответствующими КПД 1; 2 ... i имеем:
М д |
|
М с |
|
|
М с |
|
. |
(10) |
i1 |
i2 ...ii 1 |
2 ... i |
|
iпр |
|
|||
|
|
пр |
|
|||||
При проведении сил сопротивления имеем действие силы Рi на перемещении Si. Тогда, исходя из равенства работ на бесконечно малых перемещениях:
8
Pi  Si М д
Si М д  d ,
d ,
М д |
Pi Si |
|
PiVdt |
|
PiVi |
. |
(11) |
|
wдdt |
|
|||||
|
d |
|
|
wд |
|
||
С учетом КПД М д |
PV |
|
. |
(12) |
|
|
|||
wд |
|
|||
|
пр |
|
||
2.2. Приведение масс кривошипно-ползунного механизма пресса
Момент инерции кривошипного вала определяется массой эксцентрика mк и радиусом кривошипа R. (рис. 3).
Рис. 3. Схема кривошипно-шатунного механизма
Шатун совершает сложное движение, потому считается, что одна его часть движется поступательно, а другая вращательно.
mп.ш |
0,3 |
0,4 mш , |
(13) |
mв.ш |
0,6 |
0,7 mш . |
(14) |
9

Массы, совершающие вращательное движение:
mвр mк mв.ш. |
(15) |
Их момент инерции вычисляется по формуле:
Y |
m R 2 . |
(16) |
вр |
вр |
|
Массы, совершающие поступательное движение:
mп.ст mп mп.ш. |
(17) |
Скорость поступления масс вычисляется по формуле:
|
V |
Rwsin |
. |
(18) |
|
Приведенный момент инерции вычисляется по формуле: |
|
||||
Y |
Y |
m |
п |
m R2 sin2 . |
(19) |
пр |
вр |
|
ш |
|
|
3.МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ
ИПРИВОДНОГО МЕХАНИЗМА
Для правильного проектирования и рациональной экономичной эксплуатации электропривода, необходимо знать в первую очередь характер изменения нагрузки на валу двигателя в процессе работы приводимого в действие механизма, то есть знать механическую характеристику механизма. Она должна соответствовать механической характеристике электродвигателя.
В общем случае эту характеристику можно выразить эмпирической зависимостью:
|
w |
х |
|
|
М с МТ М с.ном МТ |
, |
(20) |
||
|
||||
wн |
||||
|
|
|
где М с - момент сопротивления производственного механизма; М Т - момент трения в движущихся частях;
w - рабочая скорость механизма;
wн - номинальная скорость механизма;
М с.ном - момент сопротивления при номинальной скорости;
х - показатель степени, характеризующей изменение момента сопротивления при изменении скорости.
Формула позволяет классифицировать механические характеристики на следующие категории (рис. 4).
10