

2832
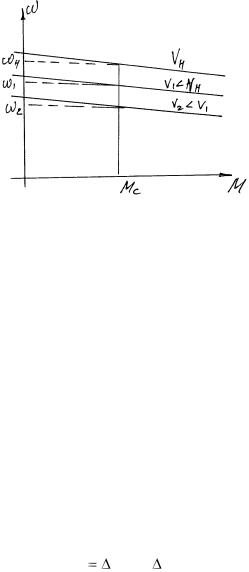
.pdfРис. 46. Влияние жесткости характеристики на стабильность регулировки скорости
Направление регулирования скорости, то есть уменьшение или увеличение ее по отношению к основной. Различают однозонное вниз от основной, однозонное вверх от основной скорости и двухзонное регулирование, когда имеется возможность получать характеристики выше и ниже естественной.
Например, при регулировании введением сопротивления в цепи якоря двигателя постоянного тока скорость по мере увеличения сопротивления уменьшается. Это означает, что регулирование изменением сопротивления может быть осуществлено только вниз по отношению к основной.
Допустимая нагрузка двигателя, то есть наибольшее значение момента, который способен развивать длительно при работе на регулировочных характеристиках, определяется нагревом двигателя. Степень нагрева в свою очередь зависит от потерь энергии в двигателе, которые определяются главным образом током, потребляемым двигателем. Таким образом, условием полного использования двигателя на разных скоростях является постоянство нагрузочного тока. То есть, если на всех регулировках ток будет равен номинальному, то это и будет означать, что двигатель загружен допустимой нагрузкой на всех скоростях.
61

20. РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Регулирование скорости асинхронного двигателя можно осуществлять двумя путями:
1.Изменением скорости вращения магнитного поля;
2.Изменением скольжения.
Частота вращения магнитного поля определяется:
n0 |
60 f |
. |
(105) |
|
|||
|
p |
|
|
Регулирование числа пар полюсов обмотки статор - регулирование ступенчатое и осуществляется с помощью переключателя
(рис. 47).
Рис. 47. Изменение числа пар полюса за счет:
а) параллельное соединение; б) последовательное соединение
В зависимости от способа соединения можно получать механические характеристики с постоянством мощности или постоянством крутящего момента (рис. 48).
62
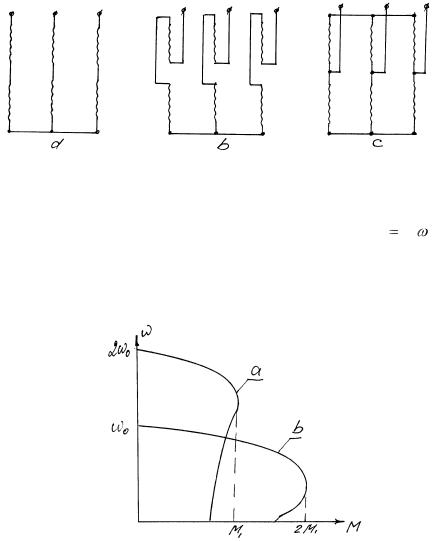
Рис. 48. Схемы соединения обмоток асинхронного двигателя с переключением числа пар полюсов
При увеличении числа полюсов с сохранением последовательного соединения обмоток мощность остается постоянной Р М , так как число витков в обмотке фазы сохраняется, и напряжение на фазе не меняется.
При переключении на вдвое большую скорость критический момент должен измениться обратно пропорционально скорости, снизиться вдвое (рис. 49).
Рис. 49. Переключение при постоянной мощности
При переключении схемы на двойную звезду, образуется две параллельные звезды в связи с чем при переходе на высшую скорость мощность увеличивается в два раза при сохранении постоянства моментов (рис. 50).
63

Рис. 50. Переключение при постоянном моменте
Асинхронные двигатели могут быть 3 и 4 скоростными.
3 |
ск. - 1500/1000/750; |
1000/750/500об/м. |
4 |
ск. - 3000/1500/1000/750; |
1500/1000/750/500 об/м. |
В настоящее время для регулирования скорости асинхронного двигателя наиболее современным и экономичным считается частотное регулирование с помощью управляемых полупроводниковых тиристорных преобразователей (рис. 51).
Рис. 51. Блок-схема тиристорного преобразователя частоты: УВ - управляемый выпрямитель; И - инвертор;
БУВ - блок управления выпрямителя; БУИ - блок управления инвертора; БЭС - блок задания скоростей
Выходная частота в широких пределах задается блоком управления инвертором. В управляемом выпрямителе напряжение регулируется по амплитуде. Такое раздельное регулирование амплитуды напряжения и частоты тока позволяет при переходе на
64
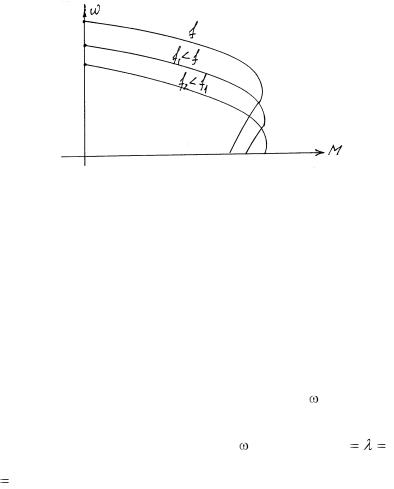
другую скорость сохранить постоянным максимальный момент, поскольку величина М пропорциональна квадрату магнитного потока полюса, а поток в свою очередь определяется частотой и фазным напряжением (рис. 52).
Рис. 52. Механические характеристики асинхронного двигателя с изменением частоты
Тиристорные преобразователи позволяют обеспечивать плавное регулирование скорости с соотношением 1:10000. Они отличаются высоким КПД (0,96), быстродействием, малыми габаритами, высокой надежностью и бесшумностью.
Роторное регулирование скорости асинхронного двигателя применяется для асинхронного с фазным ротором, когда в цепь обмотки ротора вводится система добавочных сопротивлений в виде регулировочного реостата (см. рис. 16).
Пример: Определить сопротивление, которое нужно включить в цепь ротора, чтобы двигатель вращался с частотой = 650 об/м и развивал момент М = 200 Нм.
|
Дано: Рн |
= 22 кВт; Vн = 380/220; н =723; |
М мах |
3 ; |
|
М н |
|||
|
|
|
|
|
Е2 |
197 v - |
напряжение между кольцами при неподвижном и |
||
|
н |
|
|
|
разомкнутом роторе; Y2н - номинальный ток в роторе.
65
r2 |
|
E2 Sн |
|
197 0,096 |
|
|
0,0582 - сопротивление ротора |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
Yн |
3 |
|
|
|
70,5 |
|
3 |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Sн |
750 |
723 |
|
|
0,036 , |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
750 |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Sкр |
Sн |
|
|
|
|
|
|
|
2 |
|
|
|
|
1 |
|
0,036 3 |
|
|
|
32 |
1 |
0,21, |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
Sи |
750 |
650 |
|
0,133, |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
750 |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
М мах |
|
|
|
|
9550 Рн |
3 |
9550 22 |
|
873, |
Нм |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
nн |
|
|
|
|
|
723 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М мах |
|
|
|
|
|
М мах |
|
2 |
|
|
|
|
|
|
|
||||||||||||
|
|
Sкр. |
|
|
|
|
|
|
|
|
|
1 Sи |
|
|
|
||||||||||||||||||||||
|
|
и |
|
|
|
|
М и |
|
|
|
|
М и |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
873 |
|
|
|
|
|
873 |
|
2 |
|
1 |
0,133 |
|
1,15 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
200 |
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
rg |
|
|
|
r2 |
|
|
Sкр. |
1 |
|
|
|
|
0,0582 |
1,15 |
|
|
|
1 |
0,26 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Sк |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,21 |
|
|
|
|
|
|
|||||
21. РЕГУЛИРОВАНИЕ СКОРОСТИ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Для двигателей постоянного тока было показано, что
66

n n0 |
rя Yя |
, |
(106) |
|
|||
|
СмФ |
|
|
0 |
Yя Rя |
|
|
|
|
, |
(107) |
|
СмФ |
||
|
|
|
|
где Y - ток в цепи якоря;
Ф - магнитный поток полюса.
Отсюда следует, что возможны три принципиально различных способа регулирования скорости двигателя постоянного тока:
1.Изменением тока возбуждения, то есть магнитного потока (полюсное регулирование);
2.Изменением сопротивления цепи якоря посредством реостата (реостатное регулирование);
3.Изменением подводимого к якорю двигателя напряжения (якорное).
Полное регулирование для двигателя постоянного тока с независимым возбуждением производится уменьшением тока или напряжения в обмотке возбуждения на полюсах статора двигателя. Происходит уменьшение магнитного потока, и скорость якоря при неизменном моменте сопротивления возрастает (рис. 53).
Рис. 53. Полюсное регулирование двигателя постоянного тока с независимым возбуждением
67
Регулирование скорости в этом случае производится ―вверх‖ от основной , поскольку увеличивать поток выше номинального практически не удается из-за магнитного насыщения.
В данном способе регулирования мощность двигателя остается неизменной:
N Mw, |
(108) |
где М - пропорциональна Ф; w - пропорциональна ф1 .
Следует учитывать, что при уменьшении потока и соответственно увеличении скорости вращения ток в якоре увеличивается, поэтому во избежание перегрева двигателя полюсное регулирование при нагрузке на валу, близкой к номинальной не применяют. В приводах кузнечно-прессовых машин двигатели постоянного тока с независимым возбуждением обычно регулируются плавно в диапазоне скоростей 3:1.
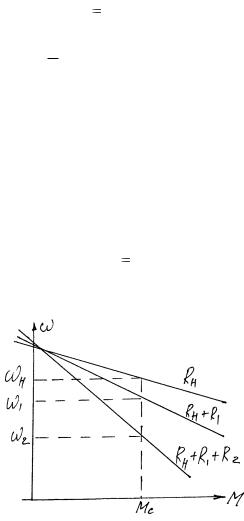
Реостатное регулирование осуществляется введением реостата в цепь якоря (рис. 54). При этом способе угловая скорость регулируется вниз от основной. Жесткость характеристики при этом уменьшается. Механическая мощность N Mw также уменьшается. Поэтому подобное регулирование применяют для двигателей малой мощности и диапазон регулирования составляет 2:1.
Рис. 54. Реостатное регулирование двигателя постоянного тока с независимым возбуждением
68
Якорное регулирование применяется только при независимом возбуждении, так как при параллельном одновременно изменялся бы и магнитный поток, что привело бы к изменению тока якоря, но не скорости. Регулирование состоит в том, что на якорь двигателя независимого возбуждения подается плавно изменяемое напряжение. Регулирование проводится вниз от основной скорости, так как напряжение, прикладываемое к якорю можно только уменьшать. При регулировании скорости введением в цепь якоря сопротивления или изменением напряжения магнитный поток остается неизменным. Поэтому во всем диапазоне по условиям нагрева двигатель будет обеспечивать один и тот же предельный момент, равный номи-
нальному М э СмYмФн . Мощность будет пропорциональна
M . В настоящее время начинают применяться тиристорные
p
преобразователи напряжения (выпрямители), обеспечивающие общий КПД ≈ 0,92.
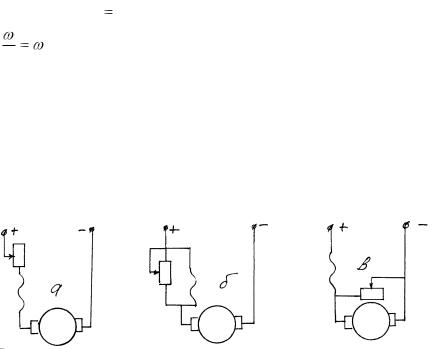
Для двигателей постоянного тока с последовательным возбуждением возможны три способа регулирования (рис. 55):
1.Регулирование посредством переменного сопротивления, включенного в цепь якоря (реостатное);
2.Изменением тока возбуждения (шунтирование обмотки);
3.Изменением подводимого к якорю напряжения (шунт. яко-
ря).
Рис. 55. Схемы регулирования двигателя постоянного тока с последовательным возбуждением:
а) реостатное; б) полюсное; в) якорное
Реостатное регулирование в цепи рабочего тока даст снижение скорости относительно основной.
69
Шунтирование обмотки возбуждения (полюсное регулирование) приводит к увеличению скорости.
Шунтирование обмотки якоря обеспечивает снижение скорости за счет уменьшения напряжения, подводимого к якорю (рис. 56).
Рис. 56. Якорное регулирование двигателя постоянного тока с независимым возбуждением
Изменение напряжения, подводимого к якорю можно обеспечить также системой «генератор - двигатель» или применением тиристорного привода с регулируемым напряжением.
Двигатели смешанного возбуждения могут сочетать принципы регулировки двигателей независимого и последовательного возбуждения.
22. ПОТЕРИ В ЭЛЕКТРОДВИГАТЕЛЕ. НАГРЕВ И ОХЛАЖДЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯ
Нагрев электродвигателя обуславливается потерями мощности, возникающими при работе. Различают постоянные и переменные потери.
К постоянным относят потери на трение в подшипнике, крыльчатки вентилятора и потери, связанные с механикой двигателя. Для двигателей постоянного тока суммарные потери мощности:
Р Рconstt P , |
(109) |
70