

2832
.pdf14. ТОРМОЗНЫЕ РЕЖИМЫ РАБОТЫ АСИНХРОННОГО ДВИГАТЕЛЯ
Во многих механизмах, вспомогательных регулируемых узлах, средства подачи и выгрузки от электродвигателей, используемых в приводе этих устройств часто требуется не только быстрый разгон, обеспечение движения с заданной скоростью, но и быстрая остановка. С тем, чтобы это обеспечить, используются как обычные механические тормозные устройства, так и специальные тормозные режимы работы электродвигателя.
Асинхронный двигатель может работать в следующих тормозных режимах:
1.генераторном с отдачей энергии в сеть;
2.противовключения;
3.динамического сопротивления.
Генераторным называется режим, когда под действием внешнего момента ротор двигателя вращается в том же направлении, что и магнитное поле, но с большей частотой вращения. Направление возникающей при этом ЭДС в обмотке ротора будет таково, что ток ротора во взаимодействии с вращающимся магнитном полем создадут силу и момент направленными в сторону противоположную вращению ротора (правило лев. руки). Такое явление возникает, когда ротор разгоняется каким либо импульсом силы (напр. сила тяжести) и избыток механической энергии на валу ротора будет превращаться в электрическую и возвращаться в сеть.
Если вращающийся асинхронный двигатель переключить на вращение в обратную сторону, то возникает режим противовключения (рис. 27). Двигатель сначала затормозится, а затем начнет вращаться в противоположном направлении.
41

Рис. 27. Торможение противовключением
Точка А перейдет на характеристику противовключения в точке В. Возникает тормозной момент, который по мере замедления вращения будет возрастать и в точке Д, чтобы не было разгона в обратную сторону, двигатель надо отключить, для чего применяют специальные устройства.
Для получения режима динамического торможения обмотку статора отключают от сети трезфазного тока и подключают на время торможения к источнику питания постоянного тока. За счет этого создается неподвижное магнитное поле и в результате взаимодействия тока ротора с неподвижным полем возникнет сила и моменты противоположные вращению (рис. 28).
Рис. 28. Динамическое торможение
42
При торможении так же, как и при разгоне, кинематическая энергия движущихся масс превращается в тепло на обмотках двигателя.
Потери энергии на нагрев цепи ротора и статора определяются аналогично тому, как и при пуске, но с учетом, что скольжение соответствует режиму торможения:
|
|
|
|
|
|
S |
|
w0 |
w |
|
|
w0 w |
, |
(76) |
|||
|
|
|
|
|
|
|
w0 |
|
|
|
|
w0 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
M |
M c |
Y |
dw |
, M c |
|
0 . |
(77) |
||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
||
Для ротора: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
tТ |
|
|
0 |
|
|
|
|
|
|
|
w0 |
|
||||
A2Т |
|
Мw0sdt |
|
|
|
Y w0 |
|
w dw |
|
Y w0 |
w dw |
||||||
|
0 |
|
|
|
w0 |
|
|
|
|
|
|
|
0 |
(78) |
|||
Yw2 |
|
Yw2 |
|
Yw2 |
|
|
|
|
|
|
|
|
|
||||
|
0 |
|
3 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
0 |
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для обмотки статора:
|
Yw2 |
|
r |
|
|
А 3 |
0 |
|
1 |
, |
(79) |
|
|
||||
1 |
|
|
|
|
|
Т |
2 |
|
r2 |
|
|
|
|
|
|
где r1 - активное сопротивление обмотки статора; r2 - активное сопротивление обмотки статора.
Если при торможении, кроме электромагнитного момента действует момент механического сопротивления, то
|
Yw2 |
|
r |
|
М |
w2 |
|
|
|
||
А 3 |
|
0 |
1 |
1 |
|
|
с 0 |
t |
Т |
. |
(80) |
|
|
|
|
|
|
||||||
Т |
2 |
|
|
r2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
43

15. СИНХРОННЫЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Синхронные машины, так же как и асинхронные являются машинами переменного тока. В отличие от асинхронных машин, которые используются главным образом как двигатели, синхронные машины находят широкое применение как генераторы, в частности на гидроэлектростанциях и тепловых электростанциях.
В кузнечно-штамповочном машиностроении синхронные машины используются как двигатели для привода насосных и компрессорных установок мощностью от 200 кВт и выше. В устройствах точных вспомогательных механизмов, в автоматических линиях или штамповочных центрах с программным управлением применяются шаговые синхронные двигатели малой мощности.
Статор синхронных двигателей устроен так же, как и у асинхронных машин и в нем создается вращающееся магнитное поле.
Ротор имеет обмотку, которая через контактные кольца связана с источником постоянного тока. Таким источником может быть электромагнитный генератор постоянного тока, ротор которого связан с ротором синхронного двигателя. В последнее время для этой цели широко используют полупроводниковые выпрямители. Обмотка ротора, питаемая постоянным током называется обмотка возбуждения.
Под действием постоянного тока в роторе возникает магнитный поток, образующий соответствующие полюсы. Если на валу ротора момент сопротивления отсутствует, то полюса магнитного поля статора и ротора должны совпасть, совершая синхронное вращение
(рис. 28.1).
Рис. 28.1. Схема работы синхронного двигателя
Если к валу ротора приложен момент сопротивления, то полюсы ротора смещаются относительно полюсов статора. Угол увели-
44
чивается до такой величины, при которой момент вращения становится равным моменту сопротивления, но скорость ротора остается синхронной скорости магнитного поля в статоре.
Используя векторную диаграмму, можно показать, что для нагруженного трехфазного синхронного двигателя электрическая мощность:
N |
|
3Е |
|
V sin |
Mw , |
|
э |
0 |
|
|
|||
|
|
|
x |
0 |
||
|
|
|
|
|
|
|
где V – напряжение в сети;
Е – ЭДС обмотки статора; х – индуктивное сопротивление обмотки статора;
w0 – угловая скорость вращения магнитного поля; - угол между векторами V и Е.
Максимальный момент будет при = 90 .
М мах |
3Е0V |
. |
|
w0 x |
|||
|
|
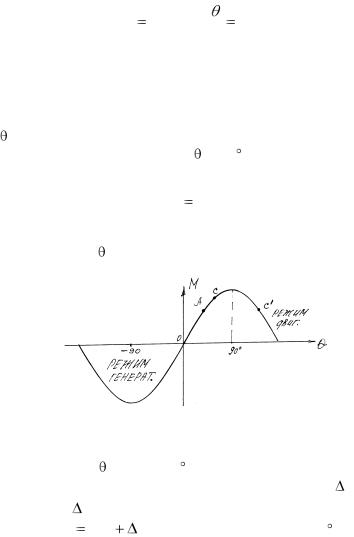
Зависимость М = f( ) называется угловой (рис. 29).
(81)
(82)
Рис. 29. Угловая зависимость синхронного двигателя
В диапазоне |
от 0 до 90 - устойчивый режим работы (т. С). |
||
При внезапном увеличении момента сопротивления на |
М с увели- |
||
чится угол на |
θ и возрастет вращающий момент двигателя до тех |
||
пор, пока М вр |
М с |
М с . На участке от 90 до 180 |
- режим не- |
45
устойчивый (Т.В). С увеличением нагрузки неизбежно увеличение , а это ведет к падению вращающего момента (т. С ). В результате полюсы ротора отрываются от полюсов статора, двигатель выпадает из синхронизации, а это ведет к его остановке. При номинальном ре-
жиме θн 20 30 |
|
. Перегрузочная способность: |
М мах |
2 3,2 . |
|
|
М |
н |
|||
|
|
|
|
||
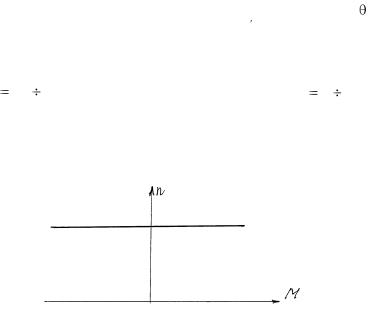
Так как при изменении нагрузки двигателя происходит лишь относительно небольшое смещение ротора относительно вращающегося поля, то механическая характеристика – прямая линия (рис. 30).
Рис. 30. Механическая характеристика синхронного двигателя
Для пуска на роторе синхронного двигателя помимо обмотки возбуждения выполняют пусковую обмотку, аналогично обмотке ротора асинхронного двигателя. Поэтому пуск осуществляется, так же как и пуск асинхронного и механическая характеристика при этом соответствует характеристике асинхронного двигателя.
После разгона до скорости на 5 % меньше чем синхронной обмотку возбуждения ротора присоединяют к источнику постоянного тока, и двигатель приобретает синхронную скорость.
Для торможения синхронного двигателя его статор отключают от сети, и присоединяют к реостату. Ротор, вращаясь по инерции, начинает работать как генератор, развивая на валу тормозной момент. Механическая характеристика аналогична механической характеристике динамического торможения асинхронных двигателей. Интенсивность торможения зависит от сопротивления тормозного реостата.
Синхронные двигатели для работы с маховиком непригодны, так как не дают возможности использовать кинетическую энергию, запасенную маховиком.
46

16.ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Вкузнечно-прессовом оборудовании применение двигателей постоянного тока вызвано нарастающей тенденцией оснащать прессовые машины особенно кузнечные и листоштамповочные автоматы регулируемым по скорости приводами. Машины, оснащенные двигателем постоянного тока, имеют возможность плавно и в широких пределах регулировать число ходов ползуна.
Воснове работы двигателей постоянного тока лежит принцип действия силы на проводник с током в магнитном поле. Двигатель постоянного тока легко переходит в генераторный режим, если подать вращающий момент на ротор (рис. 31).
Рис. 31. Конструкция двигателя постоянного тока: 1 - главные полюсы; 2- дополнительные полюсы; 3 – обмотка дополнительных полюсов; 4 – щетки;
5 - обмотка якоря; 6 – якорь; 7 – коллектор; 8 – обмотка возбуждения
К стальному корпусу крепятся главные 1 и дополнительные 2 полюса, которые могут быть сплошными или наборными из пластин электротехнической стали. На главных полюсах расположены обмотки возбуждения. Главные полюсы для равномерного распределения магнитной индукции между полюсом и якорем сделаны как бы охватывающими якорь. Якорь, набранный из листов, содержит обмотку, коллектор и установлен на подшипниках на оси статора.
47

Для подвода тока к обмоткам якоря служат щетки. С целью снижения эффекта искрения щеток их устанавливают в плоскости геометрической нейтрали магнитного поля статора и в этой же плоскости устанавливаются дополнительные полюса, обмотки которых включены в цепь якоря. С помощью дополнительных полюсов создается магнитное поле, компенсирующее магнитное поле статора в этой плоскости. Это снижает ЭДС при переходе с одной панели коллектора на другую и в конечном итоге уменьшает искрение. Число основных полюсов обычно от 2 до 4. Во вращающемся в магнитном поле якоря (рис. 32), на обмотки которого подан ток, наводится ЭДС, которая в соответствии с законом Ленца, действует противоположно направлению тока в обмотках, то есть приложенному к якорю. Напряжение уравновешивается противо ЭДС и падением напряжения на внутреннем сопротивлении якоря:
V Е Yя rя . |
(83) |
Рис. 32. Схема замещения двигателя постоянного тока
Если якорь имеет N проводников, образующих 2а параллельных ветвей, то ЭДС в якоре будет:
Е В lv |
N |
, |
(84) |
ср 2a
где l – длина проводника;
v – скорость перемещения;
Вср |
Ф2Р |
- среднее значение магнитной индукции; |
|
||
|
Д я |
|
48
Ф – магнитный поток одного полюса; Дя – диаметр якоря; Р – число полюсов.
Линейная скорость проводников в якоре:
|
V |
|
Д я n |
, |
(85) |
|
|
60 |
|||||
Тогда, |
|
|
|
|
|
|
Е |
N |
Фn |
СеФn . |
(86) |
||
60a |
||||||
|
|
|
|
|
||
Се – коэффициент, зависящий от конструктивных данных двигателя. Электромагнитная сила, действующая на проводник с током в
магнитном поле:
|
F BLY . |
|
|
|
|
|
|
|
(87) |
||||||
Поскольку в поле одного полюса находится |
N |
|
проводников с |
||||||||||||
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
2a |
|
|
|||
одинаковым током параллельной ветви (петля) Y |
|
|
Yя |
, то момент |
|||||||||||
|
|
2а |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
сил, действующих на проводники: |
|
|
|
|
|
|
|
|
|||||||
М Вср L |
Д Yя N |
N |
ФYя |
СмФYя , |
(88) |
||||||||||
|
|
|
|
|
|
|
|||||||||
2 2а 2 p |
4 a |
||||||||||||||
|
|
|
|
|
|
|
|
||||||||
где См - коэффициент, зависящий от констр. данных двигателя. |
|
||||||||||||||
Таким образом, имеем: |
|
|
|
|
|
|
|
|
|||||||
Е СеФn , М С мФY , Y |
M |
|
, Е |
V |
Yя rя . |
(89) |
|||||||||
|
|
||||||||||||||
|
|
||||||||||||||
|
|
|
|
|
|
|
CмФ |
|
|
|
|
|
|||
49
Отсюда можно получить:
|
|
V |
Yя rя |
V |
|
rя |
|
|||
|
n |
|
|
|
|
|
|
М , |
(90) |
|
|
|
СяФ |
СеФ |
СеС мФ2 |
||||||
Eсли момент сопротивления отсутствует, то М = 0, то есть |
|
|||||||||
n n0 |
rя |
|
М n0 |
ВМ - уравнение механической |
||||||
СеСмФ2 |
||||||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
характеристики. |
(91) |
|||
Уравнение выведено с учетом того, что обмотки статора и якоря действуют в отдельных цепях, то есть, не зависят друг от дру-
га (рис. 33).
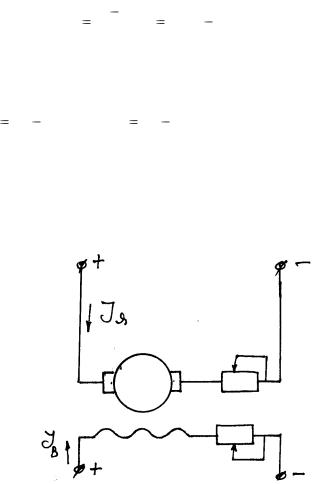
Рис. 33. Схема двигателя постоянного тока с независимым возбуждением
При такой схеме ток возбуждения не зависит от тока якоря. Так же это происходит и при параллельном возбуждении (рис. 34).
50