

Избыточные связи и лишние степени свободы (местные подвижности).
При выводе формулы Сомова Малышева предполагалось, что все уравнения связи независимы, т. е. ни одно из них не может быть получено как следствие других. В некоторых механизмах это условие не выполняется. Обозначим через q число повторяющихся (или зависимых) уравнений связи. Тогда число независимых уравнений связи равно
5 pV+4 pIV+3 pIII+2 pII+ pI- q
и число степеней свободы механизма
W =6n -5 pV-4 pIV-3 pIII-2 pII- pI+q
В дальнейшем повторяющиеся связи будем называть избыточными илипассивными, так как их можно удалить, сохранив при этом заданное число степеней свободы механизма.Уравнение содержит две неизвестные величины (W и q), так как число избыточных связей в общем случае можно определить лишь путем анализа уравнений связи. Однако в некоторых простейших случаях величина W может быть получена из непосредственного решения задачи о положениях звеньев механизма. Тогда из последнего уравнения находим число избыточных связей:
q = W+5 pV+4 pIV+3 pIII+2 pII+ pI- 6n
У странение
избыточных связей выполняется изменением
подвижностей отдельных кинематических
пар, причем для одного и того же механизма
с избыточными связями можно найти
несколько вариантов механизма без
избыточных связей.
Наличие избыточных
связей в механизмах ответственного
назначения требует повышенной точности
изготовления элементов кинематических
пар во избежание дополнительных нагрузок
на звенья механизма из-за их деформации,
которые приводят к износу или заклиниванию
с этой точки зрения избыточные связи
вредны.
странение
избыточных связей выполняется изменением
подвижностей отдельных кинематических
пар, причем для одного и того же механизма
с избыточными связями можно найти
несколько вариантов механизма без
избыточных связей.
Наличие избыточных
связей в механизмах ответственного
назначения требует повышенной точности
изготовления элементов кинематических
пар во избежание дополнительных нагрузок
на звенья механизма из-за их деформации,
которые приводят к износу или заклиниванию
с этой точки зрения избыточные связи
вредны.
Рассмотрим, кривошипно-ползунный механизм, преобразующий вращательное движение в поступательное или наоборот, часто используется. В нем применимы пары с поверхностным контактом. Он прост по устройству и подходит для передачи больших усилий. На плоской схеме, независимо от классов КП, механизм не имеет избыточных связей.
W = 3n - 2pн - pв = 33 – 23 – 0 =1 и q = W+ 2 p2 + p1 - 3n=0
По формуле Сомова Малышева
W =6n -5 p5 - 4 p4 - 3 p3 - 2 p2 - p1+q =63 - 54 – 0 – 0 – 0 + q = -2 + q,
При этом подвижность механизма, равная числу обобщенных координат W = 1, таким образом, q = W+ 2 = 3. Это означает, что при неточностях изготовления в последней паре возникнут натяги трех видов. Эти избыточные связи требуют большой точности изготовления и сборки механизма, что особенно ощутимо при увеличении размеров механизма. Условие отсутствия избыточных связей получим, подставив в исходную формулу необходимую подвижностьW =1 иq = 0,учитывая, что парыIиIIклассов в таких механизмах не применяются, окончательно получим:
1 =63 -5 pV - 4 pIV - 3 pIII + 0,
5 pV + 4 pIV + 3 pIII = 17
Для создания рационального механизма– механизма, не имеющего лишних степеней свободы и избыточных связей, в кривошипно-ползунном механизме обычно применяются сферические и цилиндрические пары. Например, рациональная схема будет получена, если шатунную паруBвыполнить в виде сферического шарнира, а паруС- в виде цилиндрического шарнира. Тогда
W =6n -5 pV - 4 pIV - 3 pIII +q =63 - 52 – 41 –31 – 0 + q = 1 и q = 0
Однако, чем выше подвижность КП, тем дороже ее изготовление, поэтому при проектировании необходимо учесть также условия эксплуатации каждого механизма.
Таким образом, очевидно, что избыточные связи – результат введения дополнительных связей, дополнительных звеньев и занижения класса КП.
Иногда избыточные связи умышленно вводят в состав механизма для повышения его жесткости или для устранения неопределенности движения звеньев в некоторых положениях.
Т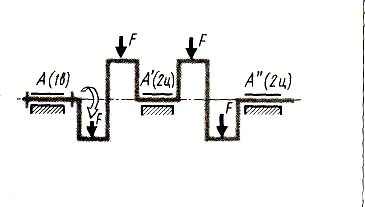 ак,
например, коленчатый вал четырехцилиндрового
двигателя образует с подшипникомА
одноподвижную вращательную пару, что
вполне достаточно с точки зрения
кинематики данного механизма с одной
степенью свободы (W=
1). Однако, учитывая
большую длину вала и значительные силы,
нагружающие коленчатый вал, приходится
добавлять еще два подшипника А'
и А",
иначе система будет неработоспособной
из-за недостаточной прочности и жесткости.
Если эти вращательные пары двухподвижные
цилиндрические (так как они не должны
работать в осевом перемещении), то помимо
пяти основных связей будет наложено 8
добавочных (повторных) связей (q
= 4
p4 =
4 2=
8);
при этом потребуется высокая точность
изготовления для обеспечения соосности
всех трех опор, иначе вал будет сильно
деформироваться, и в материале вала
и подшипников могут появиться недопустимо
большие напряжения.
ак,
например, коленчатый вал четырехцилиндрового
двигателя образует с подшипникомА
одноподвижную вращательную пару, что
вполне достаточно с точки зрения
кинематики данного механизма с одной
степенью свободы (W=
1). Однако, учитывая
большую длину вала и значительные силы,
нагружающие коленчатый вал, приходится
добавлять еще два подшипника А'
и А",
иначе система будет неработоспособной
из-за недостаточной прочности и жесткости.
Если эти вращательные пары двухподвижные
цилиндрические (так как они не должны
работать в осевом перемещении), то помимо
пяти основных связей будет наложено 8
добавочных (повторных) связей (q
= 4
p4 =
4 2=
8);
при этом потребуется высокая точность
изготовления для обеспечения соосности
всех трех опор, иначе вал будет сильно
деформироваться, и в материале вала
и подшипников могут появиться недопустимо
большие напряжения.
Для устранения неопределенности
движения звеньев вводится дополнительное
звено в так называемый спарник тепловоза,
механизм сдвоенного параллелограмма.
В данном механизме имеются соотношения:
AB = CD,
ВС = AD
(т. е. фигура ABCD
- параллелограмм). Где AB
и CD
– кривошипы. При повороте возможно
возникновение так  называемого
вырожденного параллелограмма, т.е.
кривошипAB
пройдет горизонтальное положение, а CD
нет. Для исключения появления такой
неопределенности движения вводят
дополнительное звено при этом AE
= FD, EF
=AD (т.е. фигура AEFD
- тоже параллелограмм). По свойству
параллелограмма расстояние между
точками Е
и F
всегда равно отрезку AD,
если эти точки находятся на равных
расстояниях от точек А
и D.
Поэтому введение дополнительного звена
EF
при условии, что EF
=AD, не вносит новых
геометрических связей, и число степеней
свободы остается равным 1, хотя по формуле
Чебышева П.И.
называемого
вырожденного параллелограмма, т.е.
кривошипAB
пройдет горизонтальное положение, а CD
нет. Для исключения появления такой
неопределенности движения вводят
дополнительное звено при этом AE
= FD, EF
=AD (т.е. фигура AEFD
- тоже параллелограмм). По свойству
параллелограмма расстояние между
точками Е
и F
всегда равно отрезку AD,
если эти точки находятся на равных
расстояниях от точек А
и D.
Поэтому введение дополнительного звена
EF
при условии, что EF
=AD, не вносит новых
геометрических связей, и число степеней
свободы остается равным 1, хотя по формуле
Чебышева П.И.
W = 3n - 2pн - pв = 34 – 26 – 0 = 0
Если точность выполнения указанных геометрических соотношений окажется недостаточной, например, AE≠FD, то расстояние EF уже не будет равно AD, и движение станет невозможным, т. е. число степеней свободы действительно будет равно нулю.
Лишние степени свободы (местные подвижности). Вводятся конструктором для улучшения эксплуатационных свойств механизма.
В кулачковом механизме вращение ролика
не влияет на закон движения толкателя
и как следствие является лишней
подвижностью данного механизма.
кулачковом механизме вращение ролика
не влияет на закон движения толкателя
и как следствие является лишней
подвижностью данного механизма.
Однако, с точки зрения улучшения эксплуатационных свойств ролик вводят для замены терния скольжения толкателя трением качения ролика по кулачку, что уменьшает износ и увеличивает срок службы изделия в целом.
При изучении движения механизмов необходимо исключать избыточные связи и лишние степени свободы.