

Добавил:
ivanov666
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:Дискретно-полевые модели электрических машин. Часть I II
.pdf
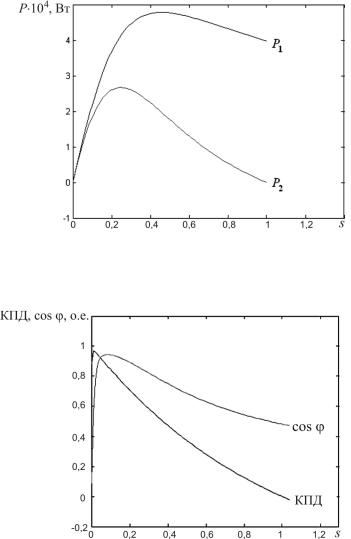
Рис. 9.9. Зависимость потребляемой и полезной мощности асинхронного двигателя с фазным ротором от скольжения
Рис. 9.10. Зависимость КПД и cos ϕ асинхронного двигателя с фазным ротором от скольжения
307
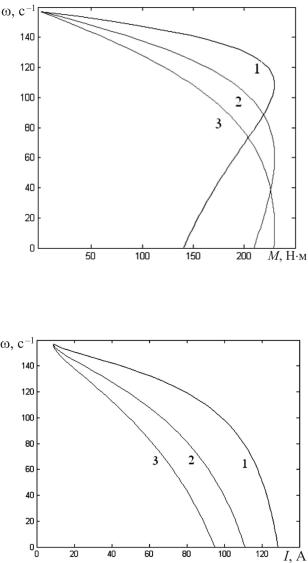
Рис. 9.11. Механические характеристики асинхронного двигателя при различных сопротивлениях в цепи ротора
(1 – Rдоб = 0 ; 2 – Rдоб = Rр ; 3 – Rдоб = 2Rр )
Рис. 9.12. Зависимость частоты вращения от тока статора при различных активных сопротивлениях в цепи ротора
(1 – Rдоб = 0 ; 2 – Rдоб = Rр ; 3 – Rдоб = 2Rр )
309
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]