8.3. ТОРМОЗНЫЕ РЕЖИМЫ КОРОТКОЗАМКНУТЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
Известно, что основными тормозными режимами асинхронных двигателей являются:
–генераторное (рекуперативное) торможение;
–динамическое торможение;
–торможение противовключением.
Все эти виды торможения просто реализуются с использованием описанной выше математической модели. Для расчёта механической характеристики при рекуперативном торможении достаточно задать в уравнении электромагнитного поля (8.12) частоту вращения рото-
ра ω превышающую частоту вращения магнитного поля ω 0= 2π f , p
зависящую от числа пар полюсов.
Механическая характеристика двигателя в этом режиме получается в результате решения приведённой выше системы уравнений с использованием описанного алгоритма. Зависимость частоты вращения от тормозного момента представлена на рис. 8.6.
Рис. 8.6. Механическая характеристика асинхронного двигателя в режиме генераторного торможения

Процесс динамического торможения короткозамкнутого асинхронного двигателя требует внесения некоторых изменений в программу. Для реализации этого режима токовая нагрузка статора задаётся в виде постоянного тока определённой величины, подаваемого на те интервалы разбиения пространственной координаты, которые соответствуют фазам, обтекаемым током в процессе торможения. При этом необходимо учитывать полярность постоянных токов в соответствии со схемой динамического торможения.
Расчёт магнитного поля при заданной системе токов позволяет определить величину радиальной составляющей магнитной индукции в зазоре двигателя и плотность индуцированных в обмотке ротора токов. Удельное электромагнитное усилие, действующее на обмотку ротора, определяется векторным произведением этих величин.
Интегрируя элементарные электромагнитные моменты в объёме воздушного зазора, можно рассчитать тормозной момент двигателя. Механическая характеристика двигателя в режиме динамического торможения, полученная с использованием математической модели, представлена на рис. 8.7.
Рис. 8.7. Механическая характеристика асинхронного двигателя в режиме динамического торможения
Режим противовключения асинхронного двигателя может быть реализован двумя способами:
1)изменением направления вращения ротора на противоположное по отношению к магнитному полю под действием момента нагрузки, величина которого превышает момент двигателя;
2)изменением направления вращения магнитного поля при реактивном моменте нагрузки.
Первый способ торможения применяется в основном для асинхронных двигателей с фазным ротором. Процесс торможения короткозамкнутых двигателей с использованием этого режима может быть применён в исключительных случаях, так как сопровождается значительным тепловыделением в обмотке ротора, которое может привести к его повреждению.
Механическая характеристика двигателя в первом режиме представлена на рис. 8.8.
Рис. 8.8. Механическая характеристика асинхронной короткозамкнутой машины, работающей в двигательном режиме при ω > 0 и в режиме тормоза при ω< 0
Что касается второго способа, то он является, по сути, процессом реверса. В первоначальный момент процесса ротор, вращаясь по инерции в прежнем направлении, переходит из режима двигателя в режим противовключения. Под действием тормозного момента частота вращения уменьшается и в некоторый момент времени становится равной нулю. При достижении остановки двигатель должен быть отключен от сети, иначе он развернётся в противоположном направлении. Тормозной процесс, осуществляемый вторым способом, рассмотрен ниже, при описании нестационарных режимов короткозамкнутых асинхронных электродвигателей.
8.4. МОДЕЛИРОВАНИЕ ПУСКОВЫХ РЕЖИМОВ АСИНХРОННЫХ КОРОТКОЗАМКНУТЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
Для асинхронных короткозамкнутых двигателей основным способом пуска является прямое включение обмотки статора на напряжение сети. Этот способ отличается исключительной простотой, однако сопровождается протеканием пусковых токов большой величины, в 5–7 раз превышающихноминальнуювеличинутокадвигателя.
Для ограничения величины пускового тока и обеспечения более плавного разгона ротора в ряде случаев пуск двигателя производится при пониженном напряжении питания. Уменьшение напряжения питания приводит к снижению величины пускового тока и уменьшению пускового момента, пропорционально квадрату величины уменьшения напряжения на статоре двигателя. Малая величина пускового момента не позволяет производить пуск при полной нагрузке двигателя. Поэтому пуск производят, чаще всего, при отсутствии нагрузочного момента на валу двигателя.
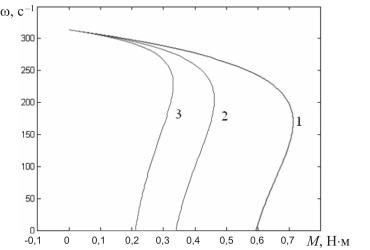
Моделирование пускового режима при пониженном напряжении реализуется с использованием описанной выше методики. В программе расчёта рабочих характеристик изменяется величина напряжения питания без других изменений представленной программы. Механические характеристики при пуске короткозамкнутого асинхронного двигателя, полученные сиспользованием модели, показаны нарис. 8.9.
Рис. 8.9. Механические характеристики двигателя при номинальном и пониженном напряжении (1 – U = Uном ; 2 – U = 0,8Uном )
Для пуска двигателя при пониженном напряжении требуется установка дополнительного оборудования. В асинхронных двигателях большой мощности для этой цели, чаще всего, используются автотрансформаторы. В короткозамкнутых двигателях небольшой мощности для снижения подводимого напряжения в цепь статора включают симметричные активные или индуктивные сопротивления. В ряде случаев для получения необходимых пусковых характеристик в цепь статора включают несимметричные сопротивления, создающие асимметрию питающих напряжений. Все эти методы могут быть реализованы с использованием описанной математической модели, в которую вносятся определённые изменения, соответствующие схеме пуска двигателя.
На рис. 8.10 представлены механические характеристики короткозамкнутого асинхронного двигателя при включении в цепь статора симметричных активных сопротивлений различной величины. Как и следовало ожидать, напряжение на зажимах двигателя уменьшается вследствие падения напряжения на дополнительных сопротивлениях обмотки статора.
245
Рис. 8.10. Механические характеристики двигателя при включении в цепь статора активного сопротивления
(1 – Rдоб = 0 ; 2 – Rдоб = RS ; 3 – Rдоб = 2RS )
Это приводит к уменьшению момента двигателя и, следовательно, к снижению жёсткости его механических характеристик. Такой способ уменьшения пускового момента часто используется в приводах металлообрабатывающих станков при изменении передаточного числа редуктора с целью изменения частоты вращения обрабатываемой детали. Для асинхронных двигателей большой мощности этот способ практически не используется вследствие значительных потерь в дополнительных сопротивлениях.
Для уменьшения пусковых токов асинхронных двигателей большой мощности чаще используют реакторный пуск, когда в цепь статора включают дополнительные индуктивные сопротивления.
Для существенного уменьшения пусковых токов в цепь статора приходится включать индуктивные сопротивления большой величины, что приводит к значительному уменьшению пусковых моментов. Поэтому такой способ пуска применим, если момент нагрузки имеет малую величину или полностью отсутствует.
246
Механические характеристики для этого способа пуска имеют такой же характер, что и при включении активных сопротивлений
(рис. 8.11).
Рис. 8.11. Механические характеристики двигателя при включении в цепь статора индуктивного сопротивления
(1 – X доб = 0 ; 2 – X доб = X S ; 3 – X доб = 2 X S )
Для пуска асинхронных двигателей малой мощности иногда используют включение в цепь статора несимметричных активных сопротивлений. Чаще всего для этой цели используют включение активного сопротивления в одну из фаз двигателя. При этом так же, как и в предыдущих случаях, происходит уменьшение пускового момента двигателя и снижение жёсткости его механических характеристик. Включение в цепь статора несимметричных активных сопротивлений обусловливает асимметрию питающих напряжений. Вследствие этого в двигателе возникает обратно бегущее магнитное поле и тормозной момент. Это вызывает уменьшение результирующего момента (рис. 8.12).
Рис. 8.12. Механические характеристики двигателя при включении в фазу C активного сопротивления
(1 – Rдоб = 0 ; 2 – Rдоб = RS ; 3 – Rдоб = 2RS )
Такой способ пуска асинхронных двигателей является наиболее экономичным и просто реализуемым на практике. Однако система фазных токов при этом получается несимметричной, причём величина пускового тока при этом уменьшается весьма незначительно. Для моделируемого двигателя, например, величина пусковых токов составляет: IA = 1,014; IB = 0,9027; IC = 0,8245 номинального пускового тока двигателя при включении в фазу С дополнительного сопротивления, равного сопротивлению фазы, и IA = 1,024; IB = 0,8491; IC = 0,6953 номинального пускового тока при включении в фазу С дополнительного сопротивления, равного двойному сопротивлению фазы.
Если величину дополнительного сопротивления фазы увеличить до бесконечности, то получим аварийный режим двигателя, эквивалентный обрыву одной фазы статора. Характеристики двигателя для этого случая представлены на рис. 8.13.
248
Рис. 8.13. Механические характеристики асинхронного короткозамкнутого двигателя (1 – симметричный режим; 2 – обрыв фазы С, моделирование; 3 – обрыв фазы С, аналитический расчёт)
Как и следовало ожидать, обрыв фазы вызывает существенное уменьшение момента и снижает жёсткость характеристики. Пусковой момент двигателя в этом случае уменьшается до нуля, токи в фазах А и В привсехскольженияхравныповеличинеипротивоположныпофазе.
Этот режим может анализироваться методом симметричных составляющих. Получаемая при этом схема замещения двигателя (рис. 8.14) содержит два последовательно включённых контура: прямого и обратного поля [2].
Рис. 8.14. Схема замещения трёхфазного двигателя при обрыве фазы С
249
Если не учитывать вытеснение тока, то параметры двигателя для обратного поля имеют те же значения, что и для прямого:
R2′′ = R2′ ; X 2′′ = X 2′ .
В этом случае момент двигателя определяется суммой моментов прямого и обратного полей:
M = M1 + M 2 ,
где моменты двигателя записываются в виде
M |
|
= |
I 22 R′2 |
; |
M |
|
= − |
I ′′22 R′′2 |
, |
1 |
2 |
|
|
|
ω0 s |
|
|
ω0 (2 − s) |
а токи определяются из схемы замещения двигателя.
На рис. 8.13 кривые 2 и 3 изображают механические характеристики трёхфазного короткозамкнутого двигателя при обрыве одной из фаз, полученные в результате моделирования (2) и рассчитанные по приведённым выше выражениям (3). Кривые имеют близкий характер, а незначительная разница объясняется тем, что расчётная кривая построена для основной гармоники магнитного поля, высшие гармоники поля при этом не учитывались.
8.5.АСИНХРОННЫЙ КОРОТКОЗАМКНУТЫЙ ДВИГАТЕЛЬ
СГЛУБОКИМ ПАЗОМ РОТОРА
Для снижения величины пусковых токов и увеличения пусковых моментов применяются специальные конструкции короткозамкнутых роторов – с глубокими пазами прямоугольной и фигурной форм. При протекании тока по проводникам ротора в пазу возникает магнитное поле пазового рассеяния, которое вызывает неравномерность распределения магнитного поля в проводнике, а следовательно, и неравномерность распределения плотности тока. Эффект вытеснения зависит от частоты тока в проводнике, его размеров и конфигурации. В проводниках ротора, имеющих значительную высоту, эффект вытеснения тока проявляется наиболее сильно. В момент пуска при скольжении,