

Автоматизация технологических процессов и производств
..pdf2.Опишите работу цифрового задатчика интенсивности в БЗС.
3.Каким образом реализуется постоянная контурная скорость при различном одновременном количестве импульсов, выдаваемых на приводы подач с выходного блока интерполятора?
4.Как обеспечивается торможение в конце кадра управляющей программы?
5.Выполните задачу интерполяции методом оценочной функ-
ции при х = 10, y = 7.
6. Выполните задачу интерполяции прямым решением дифференциального уравнения (tобр = 5 с) при х = 10, y = 7.
141

10. СИСТЕМЫ СВЯЗИ СЧПУ СО СТАНКОМ
Вначале рассмотрим позиционные СЧПУ, где не требуется интерполяция, а заданием является двоичный или двоично-десятичный цифровой код.
10.1. ПОЗИЦИОННЫЕ КОДОВЫЕ СЧПУ
Используется в позиционных системах станков и роботов (рис. 10.1), особенно в ранних версиях.
Рис. 10.1. Позиционная кодовая СЧПУ
Основное достоинство данной системы – абсолютная система координат, что увеличивает надежность системы из-за отсутствия накопления ошибок со временем.
Это достигается за счет кодового датчика положения, работающего в коде Грея. Датчики положения имеют от 12 до 16 разрядов, что позволяет получить высокую точность.
142

10.2. ПОЗИЦИОННАЯ СЧЕТНО-ИМПУЛЬСНАЯ СЧПУ
Используется в позиционных системах ЧПУ роботов и станков (рис. 10.2). Система использует импульсный датчик положения, т.е. она реализует относительную систему отсчета координат. В связи с этим в таких системах после включения источников питания осуществляется «нулирование». При этой операции осуществляется движение до точки, координаты которой определены в координатах объекта. Проходя через эту точку, можно от нее отсчитывать координаты всех задаваемых в программе позиционных точек. После отключения и повторного включения питания информация о положении, где же произошла остановка по координатам, теряется. Поэтому снова требуется производить «нулирование».
Рис. 10.2. Структура позиционной счетно-импульсной СЧПУ
Счетчик здесь работает на вычитание импульсами обратной связи. Задание должно быть в приращениях к предыдущему состоянию позиции.
10.3.КОНТУРНЫЕ СЧПУ
Впредыдущей главе рассматривались две системы контурных СЧПУ, где обязательно требуется интерполятор. Первая – с аппаратной реализацией функций интерполяции и унитарным выходным ко-
143

дом. Вторая – с программной реализацией функций интерполяции и цифровым двоичным кодом. Соответственно, различаются и системы связи со следящим электроприводом.
В позиционных системах можно перемещение по осям осуществлять поочередно. В контурных работают одновременно несколько координат. Следует учитывать разнообразие датчиков положения. Наиболее употребляемые: фотоэлектрические фазоимпульсные, индуктивные фазоимпульсные (вращающиеся трансформаторы, индуктосины).
Во всех контурных системах СЧПУ обязателен скоростной канал задания для реализации частичной инвариантности по управлению.
10.4. ЧАСТИЧНАЯ ИНВАРИАНТНОСТЬ ПО УПРАВЛЕНИЮ
На рис. 10.3 представлена структурная схема САУ с корректирующим звеном для инвариантности по управлению.
Оператор Лапласа по ошибке из рис 10.3:
δ = ХЗ – Хвых = ХЗ – WК W2 ХЗ – W1 W2 δ. |
|
|
|
|
Передаточная функция ошибки по управлению: |
δ( p) |
|
1 WÊW2 |
. |
|
|
|||
|
Xç ( p) |
|
1 W1W2 |
|
Чтобы была полная инвариантность по управлению, требуется
1
WК(p) = W2 ( p) .
Рис. 10.3. Структурная схема САУ с корректирующим звеном для инвариантности по управлению
144
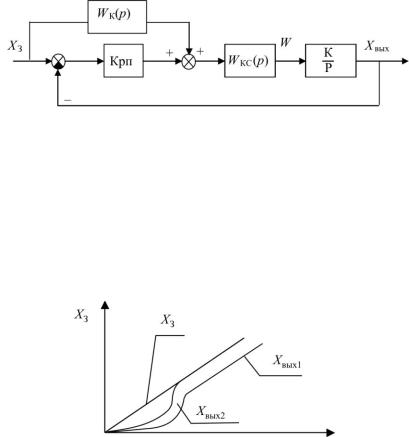
Применим этот общий вывод к следящему электроприводу, структурная схема которого приведена на рис. 10.4.
Рис. 10.4. Структурная схема следящего электропривода с корректирующим звеном для инвариантности по управлению
Регулятор положения в следящем электроприводе может быть только пропорциональным для исключения перерегулирования по выходной координате. Применение ПИ-регулятора положения приводит к недопустимому в траекторных задачах перерегулированию. Однако П-регулятор положения не позволяет исключить скоростную ошибку Xвых1 (рис. 10.5).
Рис. 10.5. Переходный процесс в следящем электроприводе при линейной заводке:
Хвых1 – с П-регулятором положения без коррекции; Хвых2 – с П-регулятором положения с коррекцией
Чтобы получить полную инвариантность по управлению, требуется корректирующее звено
145

p
WK (p) = K WKC p ,
где передаточная функция контура скорости при настройке на «симметричный оптимум»
WKC (p) = |
|
|
4Tc p |
1 |
|
(1/Kдс), |
|
||
|
8 T 3 p3 |
8 T 2 p2 |
|
|
|
||||
|
|
|
4T p 1 |
|
|||||
|
|
c |
|
c |
|
c |
|
||
где Tc – малая постоянная контура скорости. Тогда |
|
||||||||
WK (p) = Kдс |
1 |
|
(p+4Tcp2+8Tc 2p3+8Tc 3p4). |
||||||
|
|
|
|||||||
K (4Tc p |
1) |
||||||||
|
|
|
|
|
|
||||
Реализация корректирующего звена в микропроцессорной сис- |
|||||||||
теме приведена на рис. 10.6, |
где ВЧС – рассчитывает задание XЗ' |
||||||||
и корректирующий сигнал Хк |
по координатам , , , |
с учетом |
|||||||
их ограничений, т.е. |
|
|
|
|
|
|
|
|
|
Рис. 10.6. Реализация полной инвариантности по управлению в микропроцессорной следящей системе
146

Õê Käñ |
|
|
|
1 |
( |
4Ò 8Òñ2 8Òñ3 |
|
|
|
||||||
K (4Ò Ð 1) |
|||||||
|
|
|
|
|
ñ |
|
|
1 |
|
|
(K1 |
K2 |
|
K3 K4 ). |
|
|
|
|
|
|
|||
4ÒñÐ 1 |
|
||||||
|
|
|
|
||||
Реально можно ввести в цифровых системах первую производную (скорость), вторую производную (ускорение), третью производную (рывок), существенно снизив ошибку по управлению. В ряде случаев вводится коррекция по 1-й и 2-й производным или только по 1-й производной.
Ваппаратных стойках ЧПУ унитарный код уже несет в себе информацию о скорости.
После введения коррекции скоростная ошибка исключается
(см. рис. 10.5).
10.5.ПЕРВЫЕ ПОКОЛЕНИЯ КОНТУРНЫХ СЧПУ
Впервоначальных системах ЧПУ широко использовались шаговые двигатели, на систему управления которых поступает сразу унитарный код с интерполятора.* Данные разомкнутые системы в настоящее время вытесняются следящими электроприводами, рассмотренными ниже.
10.6. ФАЗОВЫЙ ИНДИКАТОРНЫЙ И РАЗНОСТНЫЙ
РЕЖИМЫ РАБОТЫ УСТРОЙСТВА СВЯЗИ С ЭЛЕКТРОПРИВОДОМ
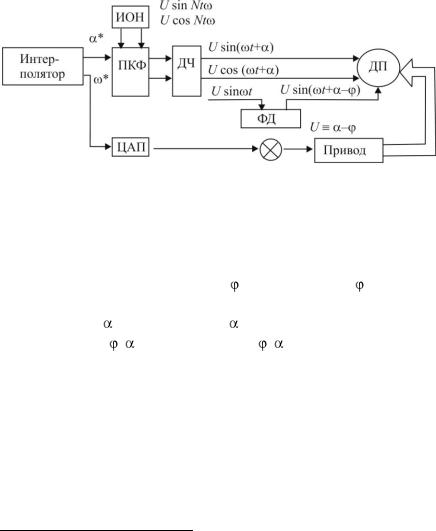
В СЧПУ типа CNC индикаторный режим реализуется по структуре, показанной на рис. 10.7, где ПКФ, ЦАП, ФД (ПФН) – преобразователи информации, принципы работы которых описаны в преды-
* Ильин О.П. [и др.]. Системы программного управления промышленными установками и РТК. Минск: Высш. шк., 1989.
147

дущих главах. В этом случае *, ω* – двоичный код, поступающий с интерполятора и блока задания скорости.
Делители частоты ДЧ имеют коэффициент деления N.
Режим работы датчика положения в фазовом индикаторном режиме называют режимом фазовращателя. Это основной режим работы в большинстве аппаратных стоек ЧПУ.
Данная же структура используется и при унитарном коде (перемещение – количество импульсов и задание скорости – частота по данной координате), но вместо ПКФ и ЦАП используются ПЧФ и ПЧН.
Рис. 10.7. Структура следящего электропривода с фазовым индикаторным регулятором положения
Фазовый разностный режим работы устройства связи с электроприводом представлен на рис. 10.8. В данной структуре за счет уменьшения зоны работы ФД и того, что ФД работает на постоянной частоте , итоговая точность СЧПУ возрастает.
Недостаток данной структуры – датчик положения не дает информации об истинном положении привода (для индикации, например), а сразу рассогласование по положению.
Есть системы связи, работающие при амплитудно-индика- торном или амплитудно-разностном режиме работы измерителей
148
рассогласования и датчиков положения*. Такие СЧПУ не нашли распространения, хотя обеспечивают повышенную точность в фазоимпульсных СЧПУ.
Рис. 10.8. Структура следящего электропривода
сфазовым разностным регулятором положения
Вамплитудно-индикаторном режиме на датчик подают
Uc1 = U1 sinωt, Uc2 = 0.
C датчика получаем Up1 = U2 sin sinωt, Up2 = U2 cos sinωt.
В амплитудно-разностном режиме
Uc1 |
= U1 |
sin |
sinωt, Uc2 = U1 cos sinωt, |
Up1 |
= U2 |
sin( |
– )sinωt, Up2 = U2 cos( – )sinωt. |
10.7.РАСЧЕТНЫЕ СООТНОШЕНИЯ ДЛЯ ФАЗОВЫХ СИСТЕМ
Вфазовых системах опорный сигнал после делителей частоты
(см. рис. 10.7)
Uоп = U sinωt,
* Коровин Б.Г. [и др.]. Системы программного управления промышленными установками и РТК. Л.: ЭАИ, 1990.
149

где ω = 2 fоп , N – коэффициент деления.
N
После ПЧФ и делителя частоты
Uвых = U sin(ωt+ ),
где – задание на перемещение, зависит от числа импульсов интерполятора fинт, которые придут за период опорной частоты.
Одному периоду фазовой системы соответствует перемещение, определяемое датчиком. Например, у линейных индуктосинов шаг датчика 2 мм. Если задана разрешающая способность СЧПУ (чаще 0,01 или 0,001 мм), то становится известно, сколько импульсов с интерполятора должно прийти, чтобы соответствовать периоду датчика.
Это число импульсов равно N = Lh ,
где L – шаг датчика (мм),
h – разрешающая способность системы (мм).
Для L = 2 мм, h = 0,001 N = 2000.
Именно это число N должно быть задано для делителей частоты (см. рис. 10.7), чтобы привязать период датчика к периоду опорной частоты конкретной СЧПУ.
Реально максимальная частота |
fоп |
в СЧПУ не превышает |
|
N |
|||
|
|
10 кГц (fоп max 20 MГц). Частота интерполятора не может превышать fоп max. Поэтому при h = 0,001 максимальная рабочая ско-
рость не превышает Vmax = |
h |
fоп max |
10 мм/c 0,6 м/мин , что яв- |
|
N |
||
|
|
|
но недостаточно.
Иногда можно хотя бы временно изменить N, снижая разрешающую способность. Если N = 200, то при h = 0,01, L = 2 мм Vmax = = 6 м/мин .
150