

Системы управления электроприводами
..pdf101
- Все данные выводы сделаны при условии МС = 0. Однако всегда имеется возмущающее воздействие МС. Поэтому реальный темп изменения скорости меньше, влияние противоЭДС на статизм будет меньше.
-В режимах наброса и сброса нагрузки ЭДС оказывает демпфирующее действие, снижает колебательность и перерегулирование в кривой тока.
-Контур тока работает независимо от внешнего контура скорости только
при наладке (контур скорости отключен) и при насыщении регулятора скорости. В последнем случае всегда имеется возможность скомпенсировать статизм по току увеличением максимального задания уставки по току.
- Если регулятор скорости ненасыщен, вопрос о статизме в контуре тока не актуален. Контур тока является подчиненным. Контур скорости формирует переходные процессы и статические режимы по скорости, задает такую величину тока, которая определена уставкой задания скорости. Например, при работе от задатчика интенсивности величина тока якоря определена
однозначно: I Я I ДИН I C |
1 |
(I |
d |
М С ) . |
|
К М |
dt |
||||
|
|
|
|||
Рассмотрим влияние противоЭДС на характер переходных процессов в |
|||||
контуре тока. Появление в ЛАЧХ левее частоты среза участка с наклоном
40 |
дб |
всегда приводит к перерегулированию. Причем перерегулирование, тем |
|||||
|
дек |
|
|
|
|
|
|
больше, |
чем ближе частота |
1 |
к частоте |
1 |
. Переходные характеристики |
||
Т ЯД |
2Т |
||||||
|
|
|
|
|
|||
приведены на рис. 11.2. Максимум тока в результате снижения установившегося значения также уменьшается.
Рис . 11.2. Переходный процесс в контуре тора с учетом и без учета противоЭДС.
Если двигатель является колебательным звеном при близости частоты |
1 |
|
|
||
Т ЯД |
||
|
к частоте среза, то требуются исследования по частотным и переходным характеристикам или моделированием на ЭВМ контура тока при конкретном состоянии параметров.
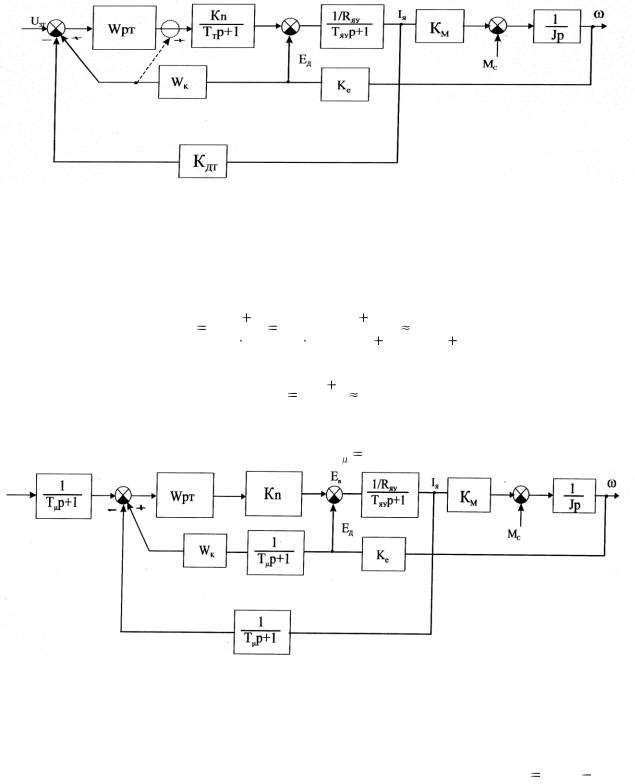
Иногда для компенсации влияния противоЭДС применяют комбинированную САР тока якоря, структурная схема которой изображена на рис. 11.3
102
Рис 11.3. Компенсация влияния противоЭДС через положительную обратную связь по ЭДС двигателя.
Для полной компенсации влияния противоЭДС при ПИ – РТ (рис. 11.3) необходимо иметь корректирующую положительную обратную связь с передаточной функцией
WK |
Tn p 1 |
|
TPT p(Tn p 1) |
|
TK p |
|
. |
|
WPT |
Kn |
|
Kn KPT (TPT p 1) TPT p 1 |
|||||
|
|
|
||||||
Если вводить корректирующее воздействие после регулятора тока , то
WK |
Tn p |
1 |
KK |
|
Kn |
|
|
||
|
|
|
|
|
Целесообразнее для реализации структуру рис. 11.3 преобразовать к виду, представленному на рис. 11.4 , где T Tn .
Рис. 11.4. Второй вариант компенсации влияния противоЭДС через положительную обратную связь по ЭДС двигателя.
При рассмотрении полупроводниковых преобразователей (§5.3) дано обоснование, что для повышения помехозащищенности полупроводниковых преобразователей на входе СИФУ устанавливают фильтр с TTP 0,003 0,005c , когда ТП можно рассматривать как безинерционное звено без учета дискретности работы и полууправляемости. Но этот фильтр лучше располагать на входе контура тока одновременно с применением аналогичных фильтров по цепям датчика тока и датчика ЭДС. Реально так и поступают. Данный подход увеличивает помехозащищенность регулятора тока и в целом контура тока без ухудшения качества регулирования.
103
12. СИНТЕЗ РЕГУЛЯТОРА СКОРОСТИ В МНОГОКОНТУРНЫХ СИСТЕМАХ
Передаточная функция замкнутого контура тока, настроенного на МО
|
|
|
|
|
ФТ ( р) |
1 |
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
K ДТ |
|
2Т р(Т р 1) 1 K ДТ |
P |
2 |
|
2 |
|
p 1 |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
1 |
, |
|
1 |
|
|
0.707 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
2 T |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
При замене р на j получим частотную характеристику |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T ( ) |
|
|
(1 2 2T 2 ) j2 T |
. |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
4 4T 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
В показательном виде |
|
|
|
T ( ) |
K1 ( |
)e j |
1 ( |
) , |
|
|
|
|
|
|||||||||||||||||||||
где амплитудная и фазовая частотные характеристики |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
K1 ( |
) |
|
|
|
|
|
1 |
|
; |
( ) |
|
arctg |
|
|
|
2 |
T |
. |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
2T 2 |
||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
4 4T 4 |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
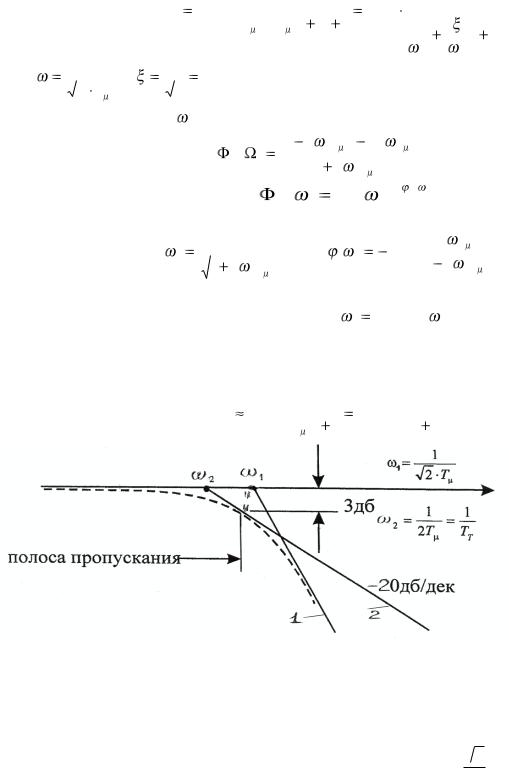
На рис. 12.1 (прямая 1) изображена ЛАЧХ замкнутого контура тока второго
порядка, определяемая выражением |
LT ( ) |
20lg K1( |
) . |
В контуре скорости внутренний |
контур |
тока с незначительной |
|
погрешностью может быть аппроксимирован передаточной функцией первого порядка (рис. 12.1, прямая 2)
ФТ |
( р) |
1 |
1 |
1 |
1 |
|
. |
|||
|
|
|
|
|
|
|
|
|||
K ДТ |
|
2Т р 1 K ДТ ТT р 1 |
||||||||
|
|
|
|
|||||||
Рис. 12.1. ЛАЧХ реального и аппроксимированного контура тока.
За полосу пропускания колебательного звена принимают частоту, на которой К1(ω) = 1, полоса пропускания апериодического звена равна частоте,
на которой происходит ослабление выходного сигнала на  22 .
22 .
Из аппроксимированных ЛАЧХ токового контура, настроенного на МО (рис. 12.1), следует, что полосу пропускания токового контура, описываемого

104
вторым или первым порядком, можно принять одинаковой и равной
|
|
|
2 |
1 |
|
||||
|
|
|
|
|
|
|
|
. |
|
пр |
1 |
|
|
|
|
|
|
T |
|
2 |
2 |
||||||||
Полоса пропускания полностью определяются постоянной T .
Структурная схема контура скорости при апроксимации токового контура звеном первого порядка представлена на рис.12.2, передаточная функция разомкнутого контура скорости имеет вид
WC ( р) WPC |
1 |
|
1 |
|
KM |
1 |
K ДС . |
K ДТ |
|
ТT р 1 |
Jp |
||||
|
|
|
|
||||
Рис. 12.2. Структурная схема контура скорости.
В данной структуре И-РС недопустим, так как САР становится неустойчивой (наклон ЛАЧХ 40 дб/дек в зоне частоты среза). Возможны к применению П- или ПИ-регуляторы скорости. В табл. 12.1 приведены параметры П- или ПИ-РС в двухконтурной САР скорости.
Частота среза контура скорости одинакова при применении П или ПИ - РС одинакова. Равны и коэффициенты усиления регуляторов. Отличие, что при применении ПИ – РС получаем астатизм второго порядка на низких частотах за счет изодромного звена.
Рассмотрим ошибки по задающему сигналу и возмущению МС (табл.
12.2).
Передаточная функция ошибки по заданию для П – РС
|
( p) |
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
aC TT p(TT p 1) |
|||||
W ( p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||
U BX ( p) 1 WC |
( p) |
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
aC TT p(TT p 1) 1 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
aC TT p(TT p |
1) |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Для ПИ – РС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
в |
С |
а 2 Т |
2 |
р 2 (Т |
Т |
р 1) |
|
|
|
|
|||||||||
|
W ( p) |
|
|
|
|
|
|
С |
|
Т |
|
|
|
|
|
|
|
|
|
|
. |
||||||
|
в |
С |
а 2 |
Т 2 |
р 2 (Т |
Т |
р 1) в |
С |
а |
С |
Т |
Т |
р 1 |
||||||||||||||
|
|
|
|
|
С |
|
Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
105 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контур скорости в двухконтурной САР. Таблица 12.1. |
||||||||
Тип |
ПФ РС |
|
Параметры |
|
|
|
|
|
ПФ |
|
|
|
|
|
|
ПФ |
|
|
|
|
ЛАЧХ |
ЛАЧХ |
Схемы и |
||||||||||
РС |
|
|
|
РС |
|
разомкнутого |
|
|
|
|
замкнутого |
разомкнутого |
замкнутого |
параметры R- C |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
контура |
|
|
|
|
контура по |
|
контура |
контура |
цепей РС |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
заданию |
|
|
|
|
(К ДС |
1) |
|
|
|
|||||
П |
|
КРС |
|
J K ДТ |
1 |
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
1 |
1 |
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
T |
|
||||||||||
|
K PC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TT |
|
|
|
|
||||||||||
|
|
|
|
|
|
а |
|
Т |
|
р(Т |
|
р 1) |
K ДС |
аС ТТ р(ТТ р 1) 1 |
|
a T |
|
T |
R |
|
|
||||||||||||
|
|
|
|
К М |
К ДС |
аС ТТ |
С |
Т |
Т |
|
C T |
|
|
T |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3T |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CC |
|
|
|
ROT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RC |
|
K PC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ROC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RЗТ=RОТ |
||
ПИ |
K PC |
TPC p 1 |
K PC |
J K ДТ |
1 |
вС аС Т Т р 1 |
|
1 |
|
|
вС аСТТ р 1 |
|
|
|
|
1 |
|
|
|
||||||||||||||
|
TPC p |
|
|
|
|
вС аС Т Т р |
|
|
K ДС |
|
|
2 |
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
К М |
К ДС |
аС ТТ |
|
|
|
вС аСТ |
Т |
р |
|
(ТТ |
р 1) |
|
1 |
1 |
|
TT |
|
R |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aCTT |
TT |
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|||
|
|
|
|
Т РС |
вС аС ТТ |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
аС Т Т р(Т Т р |
1) |
|
вС аСТТ р 1 |
|
|
|
|
CC |
|
|
|
R3T |
|
|
||||||||||||
|
|
|
|
|
|
|
без фильтра на входе |
вСaCTT |
|
|
|
ROT |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а 2 Т |
2 |
|
2 (Т |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
ДС |
в |
С |
р |
Т |
р 1) |
|
|
|
|
T |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
Т |
|
|
|
|
|
|
|
|
T |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TPT |
CC RC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вС аС Т Т р |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
R |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K PC |
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ROC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с фильтром на входе |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||

106
При единичном задающем воздействии установившаяся ошибка равна нулю для П- и ПИ-регуляторов
|
( p) |
p |
W ( p) |
U BX |
p |
|
УСТ |
p |
|||||
|
|
|
|
|||
|
p |
0 |
p 0 |
|
При линейно нарастающем задании установившаяся ошибка для ПИ
– РС также равна нулю, а для П – РС
УСТ W ( p) |
|
p aC TT |
|
, |
p 2 |
|
|||
p 0 |
|
CC |
||
где α = Uзс / t1 - задание ускорения.
Таким образом, чем больше частота среза (полоса пропускания) контура скорости, тем меньше ошибка при линейно нарастающем задающем воздействии САР скорости с пропорциональным регулятором.
Ошибки по заданию и возмущению в контуре скорости. Таблица 12.2
Тип |
|
ПФ ошибки |
|
ПФ ошибки по |
|
|
|
|
Статическая ошибка |
|
|
|
|
|
|||||||||||||||||||
РС |
|
по заданию |
|
возмущению |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
по заданию |
|
|
|
|
по возмущению |
|||||||||||||||||||||||
|
|
|
( p) |
|
|
|
|
( p) |
|
|
|
U |
|
( р) |
U ЗС |
|
U |
ЗС ( р) |
|
|
|
|
M C |
( p) |
|
M C |
|
||||||
|
|
U BX ( p) |
|
|
|
M C ( p) |
|
|
|
ЗС |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
р |
|
|
р 2 |
|
|
P |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U ЗС |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t1 |
p 2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
П |
|
aCTT p(TT p 1) |
|
|
aCTT / J (TT p 1) |
|
|
|
0 |
|
|
|
aC TT |
|
|
|
|
|
|
aC TT |
|
|
|
||||||||||
|
|
aCTT p(TT p 1) 1 |
|
aCTT p(TT p 1) 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|||||||||||||
ПИ |
|
вС аС2 ТТ2 р2 |
|
|
вС аС2 ТТ2 р / J |
|
|
0 |
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
||||||||||||
|
|
вС аС2 ТТ2 р2 (ТТ р 1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
в а2 |
Т 2 р2 |
(Т |
Т |
р 1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
С С |
|
Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(TT p 1) |
|
|
(TT p |
1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
вС аСТТ р 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
вС аСТТ р |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Передаточная функция по скорости при воздействии МС при П – РС
|
|
|
1 |
|
|
|
|
|
|
||
|
|
( p) |
|
|
|
|
|
(aCTT |
/ J )(TT p 1) |
|
|
WM |
( p) |
|
|
Jp |
|
. |
|||||
M ( p) |
1 WC ( p) |
|
aCTT p(TT p 1) 1 |
||||||||
|
|
|
|
||||||||
Аналогично выводится WM(p) для ПИ-РС (табл. 11.2).
Переходные процессы по току и скорости при П – РС и ПИ – РС , настроенных на МО и СО, приведены на рис.12.3 .
Установившаяся моментная ошибка для П - РС
|
( p) p |
WM ( p) |
M C ( p) |
p |
WM ( p) |
M C |
p |
aC TT |
M C |
|
M C |
. |
|
УСТ |
p |
J |
J |
|
|||||||||
|
p 0 |
p 0 |
|
|
|
p 0 |
|
|
CC |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Известно, что при питании двигателя постоянного тока от сети |
|||||||||||||
статическое падение скорости |
|
TЭМ |
|
M C . |
|
|
|
|
|
|
|
||
CT |
J |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В САР скорости с П-РС, как правило, аСТТ << Тэм Поэтому падение скорости в замкнутой САР значительно меньше.

107
Моментная ошибка по скорости тем меньше, чем больше результирующий момент инерции и частота среза САР скорости. Применение ПИ-РС исключает установившуюся ошибку по скорости при возмущающем воздействии ступенчатого МС.
Рис. 12.3. Переходные процессы по заданию и возмущению в двухконтурной САР скорости.
Переходные характеристики для ошибок могут быть рассчитаны по получаемым передаточным функциям. К примеру построим переходный
процесс по скорости при M C ( p) |
|
M C |
|
и |
П-РС, |
настроенном на МО для |
||||||
|
p |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
передаточной функции |
|
|
|
|
|
|
|
|
|
|
|
|
( p) |
2TT |
|
|
|
TT p 1 |
|
|
M C |
. |
|||
|
J 2T 2 p 2 |
|
|
|
|
|||||||
|
|
2T p 1 p |
||||||||||
|
|
|
|
|
T |
|
|
T |
|
|
|
|
Умножим числитель и знаменатель на |
1 |
: |
|
|
|
|||||||
|
2T 2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
108 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2TT |
|
|
|
|
|
|
|
|
|
|
|
|
|
TT p 1 |
|
|
|
|
|
MC |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MC |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
( p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TT |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
J 2 TT2 |
|
|
p |
2 |
|
|
|
|
|
p |
|
1 |
|
|
|
|
|
|
|
p |
J |
|
|
|
|
p |
2 |
|
|
p |
|
|
|
1 |
|
|
p |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
2T |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
2T 2 |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
T |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TT |
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
J p |
|
|
( p |
1 |
|
)2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2T |
|
|
|
|
|
|
4T |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
где |
1 |
|
1 |
|
|
|
i - корни характеристического полинома. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2T |
|
|
2T |
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
T |
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Получим изображение вида 1.5.2 |
табл. 6.3 , для которого оригинал |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(t) |
|
|
|
|
|
|
( A e 2TT |
|
|
|
|
|
|
|
|
) |
|
K , |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
2TT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
) |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где |
|
|
|
|
A 2TT |
|
|
|
2T |
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
4T |
2 |
|
|
|
|
2TT ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4T |
2 |
|
|
|
|
|
|
|
|
4T 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
arctg1 |
arctg ( |
|
|
1) |
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
K |
|
|
|
2TT . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2TT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Тогда |
|
|
|
|
(t) |
|
|
|
M C |
(e |
2TT |
sin( |
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
1) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2TT |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Оригинал |
|
|
(t) по возмущению для ПИ – РС, настроенному на СО |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
(aC |
вC |
2) , |
|
|
|
|
можно |
|
|
|
|
|
|
|
|
найти, |
|
|
|
|
|
|
|
|
воспользовавшись |
|
|
аналогичными |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
преобразованиями: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
8T 2 p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
(TT p |
|
|
|
|
|
1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TT p |
1 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
( p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8TT |
MC |
|||||||||||||||||||||||||||||
|
|
|
|
|
8T |
3 p3 |
8T 2 p2 |
4T p 1 p |
|
|
|
|
|
|
|
|
|
|
(2T p |
1)(4T 2 p2 |
2T p |
|
1) J |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
p |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( p |
|
|
|
1 |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TT |
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
( p |
|
1 |
|
)( p2 |
|
|
|
|
|
|
p |
|
|
1 |
|
|
) |
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( p |
|
|
|
|
1 |
|
|
)( p |
|
|
1 |
|
|
)2 |
|
|
3 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
2T |
|
|
|
|
|
2T 4T |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2T |
|
|
|
|
|
4T |
|
|
16T |
2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
T |
|
|
|
|
T |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
где |
|
, |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
3 |
i |
- корни характеристического полинома. |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2TT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
4TT |
|
|
|
|
|
4TT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
Получили изображение вида 1.8.1 (табл.6.3) , для которого оригинал |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Be 2TT |
, |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(t) |
|
|
|
|
( Ae 4T |
|
|
sin( |
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4TТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
где:

109
|
|
|
|
|
|
|
( |
|
1 |
|
|
|
|
|
1 |
) |
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|||||||||||||
|
|
4T |
|
|
4T T |
|
|
16T |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2T T |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
A |
|
|
T |
|
|
|
|
|
|
|
|
|
T |
|
T |
|
|
|
|
|
|
|
T |
|
|
|
|
|
3 4TT ; |
|
|
|
B |
|
|
|
|
|
|
|
|
|
T |
|
4TT ; |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||||||||||||||
3 |
( |
|
|
|
|
|
) |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
4T |
2T |
|
|
|
16T |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
4T |
2 |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
T |
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
4TT |
|
|
|
|
|
|
|
|
|
4TT |
|
|
|
|
|
|
1 |
|
|
|
|
3 |
|
|
|
|
|
|
0 |
0 |
||||||||||||||||||
arctg |
|
|
|
|
|
|
|
arctg |
|
|
|
|
|
|
|
|
|
|
|
|
arctg |
|
|
|
arctg |
|
|
|
30 |
|
41 |
|||||||||||||||||||||||||||
|
|
1 |
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
4TT |
|
|
|
|
|
TT |
|
|
|
|
|
|
|
|
4TT |
|
|
|
|
|
|
2TT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
11 |
2 |
|
|
|
|
|
0,192 рад. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
360 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
4TT M C |
|
|
|
t |
|
Тогда (t) |
( 3 e 4T |
|||||
|
||||||
|
J |
|||||
|
|
|
|
|
|
|
t |
||
|
|
3 t |
|
2 |
|||||
|
|
|
|
|
|||||
sin( |
|
11) e 2t ) . |
|||||||
4T |
360 |
||||||||
|
|
|
|
||||||
Отметим, что по задающему воздействию при малой его величине возникает перерегулирование 43%. Однако реально при больших воздействиях (например, при пуске) регулятор скорости насыщается, пуск происходит с постоянным током якоря. Чем больше момент инерции и коэффициент усиления регулятора, тем позднее РС выходит из насыщения, тем меньше перерегулирование.
Чтобы исключить перерегулирование по скорости при ступенчатом задающем воздействии в контуре скорости с ПИ – РС, рекомендуется на входе САР устанавливать фильтр с постоянной времени вС аС ТТ (рис. 12.4, а)
Это позволяет уменьшить резонансный пик в ЛАЧХ замкнутой системы и, соответственно, перерегулирование в переходной характеристике (табл.
12.1).
Вместо фильтра на входе ПИ – регулятора иногда используют составной регулятор скорости (рис.12.4, б)
а).
б).
Рис. 12.4. ПИ-регулятор скорости: а) – с фильтром на входе; б) – составной регулятор
Структура рис.12.4, б эквивалентна структуре рис.12.4, а, но значительно проще в исполнении и наладке. Переходные характеристики по заданию контура скорости с ПИ-РС (настройка на СО) с фильтром и без фильтра на входе САР приведены на рис.12.5.

110
46% |
8% |
|
1
 CO
CO
|
|
|
|
|
|
|
|
|
|
3,1Т |
7,6Т |
13,3Т 16,5Т |
|||||||
Рис. 12.5. Переходные характеристики по управлению к контура скорости с ПИ-РС (настройка на СО) с фильтром и без фильтра.
Хотя время первого согласования увеличивается с 3,1Т до 7.6Т , общее время переходного процесса даже уменьшается (13,3Т вместо 16,5Т ) при снижении перерегулирование с 43% до 8%.
Изображения и оригиналы выходных величин скорости и тока якоря при ступенчатых и линейно нарастающих управляющих и ступенчатом возмущающем воздействиях для П и ПИ – регуляторов скорости с фильтром и без фильтра на входе при различных настройках приведены в [6 ] (стр.
283-304), [11 ] (160-178).
Система регулирования скорости при обратной связи по ЭДС
В ряде случаев к системам электропривода не предъявляются высоких требований к быстродействию и точности. В таких системах тахогенератор не устанавливается или не может быть установлен. Используется главная обратная связь по ЭДС двигателя. Получаем двухконтурную САР с контурами тока и ЭДС (рис.12.6)
Рис. 12.6 Структурная схема двухконтурной САР с контурами тока и ЭДС.
Датчик ЭДС выполнен по принципам, изложенным в § 13 (двухзонное регулирование скорости). Контур тока настраивается по стандартной методике с учетом или без учета противоЭДС. Обычно используется П-РЭ, поскольку обычно не предъявляется требований к статическим показателям.