

Системы управления электроприводами
..pdf91
установившимся). Поэтому обычно пренебрегают влиянием противоЭДС при расчете параметров регулятора тока.
Регулятор тока может быть П, И, ПИ – регулятором. Синтез параметров регуляторов можно провести по стандартной методике, предложенной ранее.
Результирующие выражения для токового контура приведены в табл.
10.1, где:
- Тп – постоянная времени силового преобразователя (для тиристорных преобразователей Т 0,006 0,01с);
-Т - эквивалентная малая постоянная токового контура
-Тф - малая постоянная времени фильтров датчика тока, регулятора и
др.;
- аТ, вТ – параметры настройки контура тока на требуемое качество переходных процессов.
Из приведенных выражений табл. 10.1 следует:
–П-регулятор обеспечивает наибольшее быстродействие;
–И-регулятор позволяет иметь высокую помехозащищенность и плавность изменения тока якоря, что бывает полезно в экскаваторных электроприводах и им подобным.
–ПИ-регулятор обеспечивает астатизм в статике и достаточно высокое быстродействие, имеет наибольшее распространение.
Втабл. 10.1 приведены две настройки ПИ–РТ. Первая настройка на МО, наиболее часто встречающаяся, обеспечивает простые выражения для расчета параметров регуляторов, хорошие статические и динамические показатели. Вторая настройка, близкая к СО, обеспечивающая подъем низкочастотной части ЛАЧХ, имеет ряд недостатков. Это прежде всего сложные выражения для расчета параметров, появление резонансного пика в ЛАХЧ замкнутой САР, перерегулирование по управлению.
При расчете R-C элементов регуляторов вначале задаются величиной С, поскольку ряд номиналов керамических емкостей ограничен. Обычно величина
С |
0,1 4мкф (оптимально 0,5 |
1 мкф). |
|
|
|
|
|
В таблице дается рекомендация принимать |
RЗТ RОТ . |
В этом |
случае |
||
коэффициенты |
усиления по |
заданию и по |
обратной |
связи |
равны |
|
( КУЗ |
RT / RЗТ |
КУОТ RT / ROT ). |
|
|
|
|
Это упрощает выражения при расчете следующих контуров. Данная рекомендация отражает факт, что в системах управления номинальные сигналы с датчиков, с задающих органов, с выхода регуляторов принимаются нормированными 10 В.

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
92 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Настройки контура тока. Таблица 10.1. |
||||||
Тип |
ПФ РТ |
|
|
Параметры |
|
|
|
|
|
|
ПФ |
|
|
|
|
|
|
|
ПФ |
|
ЛАЧХ разомкнутого |
ЛАЧХ |
Схема и параметры R – C |
||||||||||||||||||||||||
РТ |
|
|
|
|
|
|
РТ |
|
|
|
|
|
|
|
|
|
разомкнутого |
|
|
замкнутого |
|
контура |
|
замкнутого |
цепей регулятора |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
контура |
|
|
|
|
|
|
контура |
|
|
|
|
|
|
контура |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K ДТ |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
(T |
|
|
|
T |
ЯЦ |
)2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
K |
|
|
|
|
|
|
|
1 |
20lg |
K |
1 |
R |
|
|
|
|||||
|
|
|
|
|
K |
4 |
|
2 |
T T |
|
|
|
|
|
|
|
|
K |
|
|
|
|
K ДТ |
|
1 |
K |
|
|
|
20lgK/(1+K) |
|
CТ T |
1+K |
CT |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
ЯЦ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
OT |
|
|
|
||||
П |
|
KPТ |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
(T p |
|
1)(TЯЦ p |
|
1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т ТЯЦ Р2 Т ТЯЦ Р 1 |
|
|
|
|
TЯУ |
|
|
|
|
RT |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
K R |
ЯЦ |
|
|
|
|
|
|
|
|
|
|
|
|
T TП |
ТФ |
|
|
|
|
K PC |
|||||||||||||||||||
|
|
|
|
|
KPТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 К |
|
1 К |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
K |
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ROT |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
П |
дТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СТ |
2T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TИТ |
|
аT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СТ |
|
|
|
|
|
|
|
|
|||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
||||||
|
|
|
|
|
|
K П |
К ДТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3T |
|
|
|
||||
|
|
TИТ p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
RЯЦ |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
OT |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K ДТ |
|
|
T |
|
TЯЦ |
TП |
ТФ |
|
|
CT |
|
|
TИТ=СТROT |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аТ T |
p |
(T |
p |
|
1) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
TPТ |
|
|
TЯЦ |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
R |
C |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СТ |
T |
|
|
|
|
|
|
|
T |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аТ Т р(Т р 1) 1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
TPТ p |
1 |
|
K PТ |
|
TЯЦ |
|
|
|
|
a |
|
= 2 при МО |
|
|
|
|
|
|
|
|
|
R |
|
|
|
||||||||||||||||||||
|
K PТ |
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
аТ T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3T |
|
|
|
|||||||
ПИ |
TPТ |
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
TП |
ТФ |
|
|
|
R |
|
|
|
||||||
|
|
|
|
|
|
|
ЯЦ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OT |
|
|
|
|||||||
|
|
|
|
|
|
|
K П |
К ДТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СТ |
aT T |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
аТ = вТ = 2 |
|
|
|
вТ аТ Т |
р |
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TPT |
CT RT |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
при СО |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RT |
|||||||||||||||
|
|
(T |
p 1) |
|
|
|
|
|
|
|
2 |
Т |
2 |
/ Т ЯЦ ) р |
|
|
К ДТ |
|
|
|
|
|
|
|
1 |
|
|
|
|
K |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(вТ аТ |
|
|
|
|
|
|
|
|
|
СТ |
|
|
|
|
CT |
PT |
|
|
|||||||||||||
|
KPТ |
PТ1 |
|
|
|
TPТ |
вТ аТ T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
ROT |
||||||||||||
ПИ |
TPТ |
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в а Т 1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
Т ЯЦ |
|
|
|
|
RЯЦ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т Т |
|
|
1 |
1 |
|
1 |
|
|
|
|
|
Рекомендуется RЗТ = RОТ |
||||||||
|
|
|
|
|
K |
|
|
|
|
|
|
(Т |
р |
|
1)(Т |
|
р |
|
1) |
Ар |
3 |
Вр |
2 |
Ср 1 |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
PТ |
а T |
|
|
K |
|
|
|
К |
|
|
ЯЦ |
|
TЯЦ |
вТaTT a T |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
Т |
|
Г |
|
|
|
П |
|
|
|
ДТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

93
После расчета R-C элементов регулятора тока эти элементы устанавливаются на плате регуляторов, производится опытная наладка динамических процессов в контуре тока. Обычно производится подбор элементов, изменяя их номиналы плавно или ступенчато. Лучше настраивать регуляторы, в которых интегральная и пропорциональная составляющие разнесены (рис.10.4 ).
|
|
|
RT |
|
|
R1 |
|
|
|
|
|
|
|
|
|
|
|
||
UЗТ |
R |
|
|
|
|
|
|
|
|
|
3T |
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
|
UУ |
||
|
ROT |
|
|
|
|
|
|
||
|
|
|
|
|
R1 |
|
|
||
|
|
|
|
|
|
|
|
||
|
|
|
CT |
|
|
|
|
|
|
|
R3T |
|
|
|
|
|
|
|
|
|
ROT |
|
|
|
|
|
|
|
|
|
UOT |
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
WPT K PT |
1 |
; |
K PT |
RT |
; |
TPT |
CT |
ROT |
|
TPT |
ROT |
K PT |
|||||||
|
p |
|
|
|
|
||||
|
K PT |
|
|
|
|
|
|
|
WPT |
KPT |
TPT p |
1 |
; |
K PT |
|
RT |
; |
TPT |
CT |
R1 |
TPT |
p |
|
ROT |
K |
|||||||
|
|
|
|
|
|
|
|
||||
Рис. 10.4. Раздельная настройка параметров регулятора тока: |
|||||||||||
а) - параллельное включение ОУ; б) |
- последовательное включение ОУ |
||||||||||
Рекомендуется запомнить несколько правил настройки ПИ– регулятора:
а) сначала настраивается пропорциональная составляющая регулятора (емкость шунтуется). Этим подбирается требуемая частота среза и быстродействия САР. Затем настраивается интегральная составляющая, начиная с больших емкостей.
б) При уменьшении RТ уменьшается постоянная изодрома и коэффициент регулятора;
При уменьшении RОТ увеличивается коэффициент усиления контура; При уменьшении СТ уменьшается постоянная изодрома;
При уменьшении RЗТ увеличивается масштаб по заданию и коэффициент усиления в следующим контуре.

94
в) Изменение только коэффициента усиления регулятора удобно потенциометром по схемам рис. 10.5.
U
У
а). уменьшение КУ. |
б). увеличение КУ |
Рис.10.5. Схемы настройки коэффициента усиления регулятора.
Более подробно влияние изменения параметров регулятора тока на переходные процессы представлены в таблице 10.2. В исходной схеме принят регулятор тока с передаточной функцией
WPT |
K PT |
TPT p |
1 |
при Трт = 0,05с, Тμ= 0,01с. |
|
TPT |
|
|
|||
|
|
|
|
|
|
Ограничение тока якоря
Как рассмотрено в предыдущих параграфах, ограничение величины тока в контуре тока можно обеспечить:
-ограничением величины управляющего сигнала на входе контура тока, т.е. ограничением выходного сигнала предыдущего регулятора;
-применением задатчиков интенсивности при М С = const.
В одноконтурных системах (без контура тока якоря) можно использовать и другие способы, которые используются на практике:
1.Токовая отсечка (задержанная отрицательная обратная связь по току) (рис. 10.6)
Рис. 10.6. Структурная схема одноконтурной САР по скорости и токовой отсечкой для ограничения тока.

95
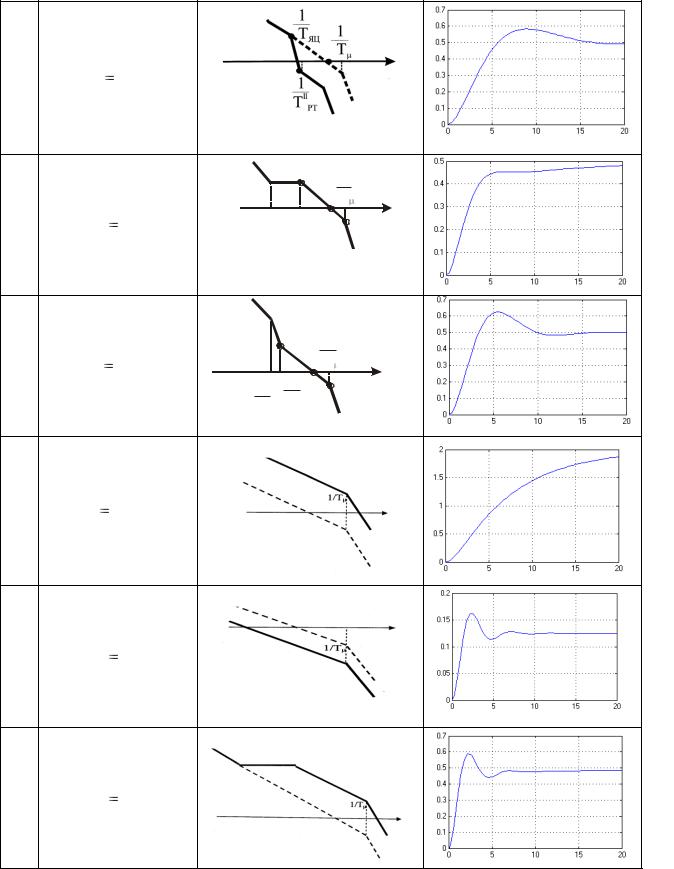
Влияние изменения параметров регулятора тока на ЛАЧХ и переходную характеристику контура тока.Таблица 10.2.
|
Изменения |
ЛАЧХ |
Переходная |
||
|
|
|
разомкнутого контура |
характеристика |
|
|
|
|
|
|
U ЗТ 0,5U ЗН |
1 |
R |
CT |
|
|
|
T |
|
|
|
||
|
R3T |
|
1 |
1 |
|
|
|
|
|
||
|
R |
|
2T |
T |
|
|
OT |
|
|
|
|
|
Исходная схема |
|
|
|
|
|
настройки – МО |
|
|
|
|
2 |
RЗТl 2RЗТ |
3 |
RЗТll 0,5RЗТ |
1 T
4 |
ROl Т 0.5ROТ |
1 T
5 |
ROllТ 2ROТ |
1 T
6 |
RТl 2RТ |
1 |
1 |
|
|
||
|
|
TlPT |
TЯЦ |
96
Продолжение табл. 10.2
7 |
RТll 0,5RТ |
1 T
8 |
CTl 2CT |
|
1 |
1 |
||
|
|
|
|
|
||
|
l |
|
T |
|||
|
|
|
||||
|
|
T |
ЯЦ |
|||
|
|
|
PT |
|
|
|
|
|
|
|
1 |
9 |
ll |
0,5CT |
|
T |
CT |
|
1 |
||
|
|
|
1 |
|
|
|
|
TllPT |
|
|
|
|
TЯЦ |
|
|
|
|
|
10ROl Т 0.25ROТ
11ROllТ 4ROТ
12RТl 4RТ

97
Окончание табл. 10.2
13 |
Rll |
0,25R |
|
Т |
Т |
|
|
|
|
1 |
14 |
Cl |
|
|
T |
4C |
|
|
||
|
T |
T |
1 |
1 |
|
|
|
||
|
|
|
l |
T |
|
|
|
T |
ЯЦ |
|
|
|
PT |
|
|
CTll 0,25CT |
|
1 |
15 |
|
T |
|
|
|
1 |
1 |
|
|
TllPT |
|
|
|
TЯЦ |
|
|
|
|
Обратная связь по току включается при IЯЦ Iотс, ограничивая выходное управляющее Uу регулятора. Однако для систем ТП-Д подобная связь неэффективна. За период дискретности может возникнуть ток, значительно больше допустимого, а ограничение его произойдет только в следующем периоде управляемости. В системах Г-Д такая структура ранее широко применялась.
2. |
Упреждающее токоограничение (рис. 10.7) |
|
|
|||||||
В статике |
в якорной цепи выполняется условия |
|
|
|
||||||
|
I Я |
|
Ed |
Eg |
, |
Ed |
K UУ . |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
RЯУ |
|
|
|
|
|
||
Необходимо ввести ограничение на разность напряжения задания Еd и |
||||||||||
противоЭДС ЕЕ, чтобы ограничить величину Еd – EE |
≡ IЯ RЯЦ. Требуется |
|||||||||
выполнить условие |
I Я RЯУ |
К UУ |
Eg |
U ДОП |
I ЯДОП |
RЯУ . Это выполняется |
||||
в схеме рис. 10.7 |
|
|
|
|
|
|
|
|
|
|
Если напряжение на |
стабилитронах превысит |
U l |
, выход |
W |
||||||
|
|
|
|
|
|
|
|
ДОП |
|
рег |
шунтируется, не позволяя подавать на СИФУ управление, недопустимое по возможному току якоря в этом случае. В установившихся режимах данный метод обеспечивает хорошие результаты. Но в динамике ток якоря нарастает медленно (нет форсировки по управлению). Кроме того, при нелинейности характеристики Ed=f(UУ) не во всем диапазоне регулирования величина IЯ ДОП одинакова.

98
Рис. 10.7. Структурная схема одноконтурной САР скорости с упреждающим токоограничением.
Рассмотрим ограничение по производной тока якоря в контуре тока. Для двигателей постоянного тока со сплошным ярмом магнитопровода максимально допустимый по условиям коммутации темп изменения тока якоря составляет 15-25 IН / с (номинальных значений тока якорной цепи за секунду). Для двигателей с шихтованным магнитопроводом допускается 50 Iн / с и более.
Переходная характеристика в контуре тока с ПИ-РТ
|
|
t |
|
|
|
Я t |
I Я max (1 e 2T |
|
(sin |
t |
cos |
t |
) . |
|
2T |
2T |
||||
|
|
|
Производная тока якоря
dI Я |
|
I Я max |
|
t |
|
|
|
||
|
e 2T |
|||
dt |
|
T |
||
|
|
|
||
t sin 2T .
Вторая производная тока якоря в момент максимума первой производной равна нулю
dI Я2 |
|
I Я max |
|
t |
||
|
|
|
||||
|
e |
2T |
||||
dt 2 |
|
|
|
|
|
|
|
|
2 T |
|
|||
|
|
|
|
|||
sin( |
t |
|
|
) 0 . |
|
2T |
4 |
||||
|
|
||||
Максимальная величина производной достигается при t = |
|
T и равна |
||||||||||||||||||
2 |
||||||||||||||||||||
|
|
dIЯ |
|
|
|
IЯ max |
|
|
|
|
|
|
|
0,32 |
IЯ max |
|
|
|
||
|
|
|
|
|
e 4 sin |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
dt |
|
MAX |
T |
|
|
|
|
|
4 |
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
При IЯ max = 2IН и |
|
Tμ |
= 0,01 с |
|
|
dIЯ |
|
|
|
64I |
Н |
|
|
|
|
|||||
|
|
|
|
dt |
MAX |
|
|
|
с |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Таким образом, |
при |
|
пуске, как |
|
|
правило, |
требуется |
обязательная |
||||||||||||
проверка по максимальной допустимой производной тока якоря, особенно для машин, не предназначенных для работы с полупроводниковыми преобразователями.
99
Если проверка показывает, что максимум возможной производной тока превышает допустимый уровень, для ограничения производной тока используются способы:
-увеличение Тμ (но уменьшается быстродействие контуров тока и скорости);
-применение фильтра на входе контура тока (но уменьшается быстродействие контура скорости);
-применение задатчиков интенсивности 1-го и 2-го рода или фильтра на входе регулятора скорости.
Последний способ самый употребляемый.

100
11. ВЛИЯНИЕ ПРОТИВОЭДС ДВИГАТЕЛЯ НА КОНТУР ТОКА
Рассмотрим контур тока с ПИ – РТ, настроенным на МО и учтем влияние э.д.с. двигателя (рис.11.1). Передаточная функция разомкнутого контура тока с учетом полученных в § 5.1 результатов:
WТ |
( р) |
1 |
|
ТЭМ р(Т ЯЦ р 1) |
|
2Т р(Т р 1) ТЭМ р(Т ЯЦ р 1) 1 |
|||||
|
|
||||
Рис. 11.1. ЛАЧХ разомкнутого контура тока с учетом влияния противоЭДС.
Поскольку ТД2 близко к ТЭМ, то влияние противоэдс начинает сказываться
после сопрягающей частоты |
1 |
|
|
1 |
. В ЛАЧХ разомкнутого контура тока |
||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Т2 |
|
|
ТЭМ |
|
|
|
|
|
|
|
|
|
|
|
||
появляется наклон «0» |
дб/дек (статизм). |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Передаточная функция ошибки по току |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
( р) |
1 |
|
U * ЗТ ( р) |
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
||||||||
Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Т ЭМ (Т ЯЦ р 1) |
|
|
|
||||||||||
|
1 W ( р) |
|
|
|
|
1 |
|
|
|
р |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
Т |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2Т (Т р 1) Т ЭМ р(Т ЯЦ |
р 1) 1 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
2Т |
(Т |
р |
1)(Т ЭМ р(Т ЯЦ р |
1) 1) |
1 |
, |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2Т (Т |
р |
1)(Т ЭМ р(Т ЯЦ р 1) 1) |
Т ЭМ (Т ЯЦ р |
1) р |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
где U * ЗТ ( р) |
1 |
- единичный вход задания тока в относительных единицах. |
|||||||||||||||||||||||
|
|||||||||||||||||||||||||
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Ошибка по току в установившимся режиме
|
|
Т ( р) р |
|
2Т |
|
|
||
|
|
|
|
|
|
|||
|
Т УСТ |
|
|
. |
||||
|
|
|
|
|
|
|||
|
|
|
|
|
2Т |
|
ТЭМ |
|
|
|
|
р→0 |
|
|
|
||
Т ЭМ |
2Т , поэтому ТУСТ |
|
2Т |
. |
|
|
|
|
|
|
|
|
|
||||
|
|
|
ТЭМ |
|
|
|
||
В тиристорных приводах 2Т |
0,01 0,02 с, Т ЭМ |
0,08 0,5 с, |
||||||
ТУСТ % |
2 20% , то есть зависит от реальной величины ТЭМ. |
|||||||
В транзисторных приводах 2Т |
0,002 0,004 |
|
|
ТУСТ % 0,4 5 . |
||||
Таким образом, только при большом соотношении Тμ / Тэм следует учитывать влияние противоЭДС с точки зрения статизма по току.
Следует учесть следующее: