

Телемеханика и связь
..pdfГЛАВА 1. СООБЩЕНИЯ И СИГНАЛЫ
1.1. Основные понятия
При управлении производственным процессом всегда возникают сообщения о ходе процесса, которые необходимо передавать автоматическому устройству или руководству. Эти сообщения порождаются различными событиями.
Сообщения о событии могут быть многообразными. Например, сообщение об изменении состава сырья может быть передано данными телеизмерений, а переключение объекта – телесигнализацией. В некоторых сообщениях, полученных с помощью телеизмерений, может оказаться больше сведений, чем это необходимо оператору или вычислительной машине для принятия решений. Некоторые из них уже были известны, а какая-то часть сообщения содержит новизну.
Информация – совокупность сведений о каких-либо событиях, явлениях или предметах.
Для передачи или хранения информации используют различные знаки (символы), позволяющие выразить (представить) ее в некоторой форме. Этими знаками могут быть слова и фразы человеческой речи, жесты и рисунки, формы колебаний, математические знаки и т.п.
Сообщение – совокупность знаков, содержащих ту или иную информацию.
Так, при телеграфной передаче сообщением является текст телеграммы, представляющий собой последовательность отдельных знаков – букв и цифр. При разговоре по телефону сообщением является непрерывное изменение во времени звукового давления, отображающее не только содержание, но и интонацию, тембр, ритм и иные свойства речи. При передаче движущихся изображений в телевизионных системах сообщение представляет собой изменение во времени яркости элементов изображения.
11
ELIB.PSTU.RU
Стр. 11 |
ЭБ ПНИПУ (elib.pstu.ru) |
Передача сообщений (а следовательно, и информации) на расстояние осуществляется с помощью какого-либо материального носителя (бумаги, магнитной ленты и т.п.) или физического процесса (звуковых или электромагнитных волн, тока и т.п.). Физический процесс, отображающий (несущий) передаваемое сообщение, называется сигналом.
В качестве сигнала можно использовать любой физический процесс, изменяющийся в соответствии с переносимым сообщением. В современных системах управления и связи чаще всего используют электрические сигналы. Физической величиной, определяющей такой сигнал, является ток или напряжение. Сигналы формируются путем изменения тех или иных параметров физического носителя по закону передаваемых сообщений. Этот процесс (изменения параметров носителя) принято называть модуляцией. Сообщения могут быть функциями времени, например, речь при переда- че телефонных разговоров, температура или давление воздуха при передаче телеметрических данных, спектакль при передаче по телевидению и т.п. В других случаях сообщение не является функцией времени (например, текст телеграммы, неподвижное изображение и т.д.).
1.2.Преобразование непрерывных сообщений
âдискретные сигналы
Сигналы разделяются на дискретные è непрерывные как по параметру, так и во времени. К дискретным относятся команды управления типа «включить», «выключить», сообщения сигнализации типа «включено», «выключено» и знамя параметров, передаваемых при дискретном импульсно-кодовом измерении или многопозиционном управлении (многопозиционные команды). Дискретное по параметру сообщение имеет конечное число зна- чений.
Передача и хранение дискретных сообщений математики соответствуют передаче и хранению конечного набора символов и могут быть сведены к передаче и хранению последовательности чи- сел. Это справедливо для всех дискретных сообщений.
12
ELIB.PSTU.RU
Стр. 12 |
ЭБ ПНИПУ (elib.pstu.ru) |

Непрерывные сообщения
представляют собой непрерывные функции времени с бесконечным числом промежуточных
точек. Такие сообщения переда-
ются при измерении, если изме-
ряемый параметр может принимать любое значение, в определенных пределах, а не только
дискретное. К непрерывным со-
общениям также относятся команды управления, которые передаются в виде непрерывно изменяющихся величин, например таких, как значение, на которое
необходимо открыть щит шлюза, и т.п.
Для передачи непрерывных сообщений без погрешности необходим канал связи с бесконечной пропускной способностью. На практике всегда передача сообщений осуществляется с ограниченным спектром, так как все каналы имеют ограниченную пропускную способность.
Если непрерывное сообщение имеет ограниченный спектр частот, оно всегда может быть передано своими значениями в отдельные моменты времени, т.е. превращено в дискретное во времени сообщение, состоящее из последовательного во времени ряда значений.
Возможность такой замены была впервые установлена и сформулирована в 1933 году В.А. Котельниковым в виде следующей теоремы: «Если функция (t) не содержит частот выше Fm, Гц, то она полностью определяется своими мгновенными значениями в моменты
времени, отстоящие друг от друга на |
1 |
Fm». Функцию с ограниченным |
|||||
2 |
|||||||
|
|
|
|
|
|||
спектром можно записать в виде тригонометрического ряда |
|
||||||
|
|
sin 2 Fm t k t) |
|
|
|||
(t) t k t) |
|
|
|
, |
(1.1) |
||
|
2 Fm |
t k t) |
|||||
k |
|
|
|
|
|||
ãäå k – порядковый номер отсчета функции.
13
ELIB.PSTU.RU
Стр. 13 |
ЭБ ПНИПУ (elib.pstu.ru) |

При этом функция вполне определяется своими мгновенными зна- чениями (k t), отсчитанными через равные дискретные интервалы вре-
ìåíè t 12 Fm , называемые интервалами дискретизации (рис. 1.1).
Свойством ряда (1.1) является то, что значение ряда в момент k t определяется только k-м членом ряда, так как все другие члены в этот момент времени обращаются в нуль.
Таким образом, непрерывное сообщение сводится к сигналу в виде последовательности импульсов, амплитуда которых равна значению исходной функции, передаваемой в дискретные моменты времени k t, а интервалы между ними
t |
1 |
F |
|
. |
(1.2) |
|
2 |
m |
|||||
|
|
|
|
При выполнении условия (1.2) непрерывная и дискретная во времени функции обратимы между собой (тождественны)
Для преобразования дискретной функции в непрерывную нужно включить идеальный фильтр нижних частот с частотой среза (высшей пропускаемой частотой) Fm.
Процесс преобразования непрерывного сообщения в дискретный во времени сигнал называется дискретизацией во времени (ðèñ. 1.2, á).
В отличие от изложенного процесс преобразования непрерывной функции в дискретную по параметру (уровню) носит название квантования по параметру и состоит в следующем: в диапазоне непрерывных значений функции (t) выбирается конечное число дискретных значений функции, распределенных, например, равномерно по всему диапазону (рис. 1.2, à). В произвольный момент времени значение функции (t) – заменяется ближайшим дискретным по параметру значением (см. рис. 1.2, à). Функция при этом приобретает ступенчатый вид.
Шагом квантования по параметру называется разность между соседними дискретными значениями функции. Для равномерного квантования шаг квантования постоянный:
êâ |
( max min ) |
, |
(1.3) |
|
(q 1) |
||||
|
|
|
ãäå q – число шагов квантования.
14
ELIB.PSTU.RU
Стр. 14 |
ЭБ ПНИПУ (elib.pstu.ru) |
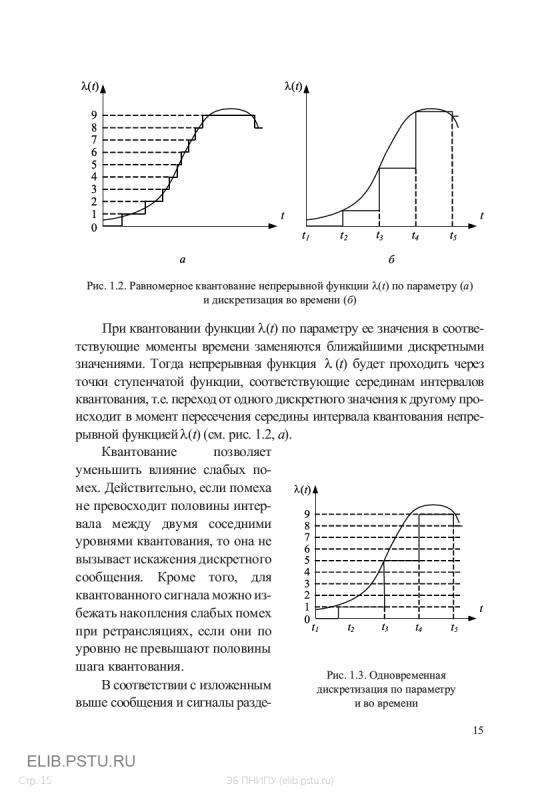
ляются на четыре вида: непрерывные, дискретные во времени, дискретные по параметру и дискретные по параметру и во времени.
Сигналы, дискретные по параметру, называются квантованными. На рис. 1.3 приведен сигнал одновременно дискретный во времени и по параметру.
1.3. Преобразования сигналов
Один общий канал связи может использоваться для образования многих вторичных, более узкополосных каналов с независимой передачей сигналов. В этом случае к одному передатчику подклю- чается ряд источников сообщений. На приемной стороне производится разделение сигналов на соответствующие сообщения, пригодные для восприятия их человеком, или для ввода в машину, или для подачи на объект управления.
Процесс автоматического преобразования сообщения в сигнал происходит в передатчике, который включает в себя одну или несколько из
следующих операций: преобразование, кодирование, модуляцию. Эти операции могут выполняться раздельно или совместно.
Преобразование используется для изменения носителя информации или самой передаваемой функции по определенному закону, обеспечивающему однозначное соответствие между выходной функцией преобразователя и входной.
Применяется как линейное, так и нелинейное преобразование. Линейная зависимость используется обычно для преобразования неэлектрических величин (скорости, давления, уровня, расхода и т.п.) в электрические (напряжение или электрический ток), более удобные для передачи и последующих преобразований. Стабильность коэффициента передачи преобразователя является важнейшим фактором, влияющим на выбор типа преобразователя.
При измерениях широко используются такие преобразования, как линеаризация, масштабирование, преобразование координат
èò.ä.
Âдискретных системах широко применяется нелинейное преобразование, при котором исходная функция заменяется другой, обычно дискретизированной, квантованной по уровню. В частном случае квантование сводится к передаче всего двух уровней, соот-
16
ELIB.PSTU.RU
Стр. 16 |
ЭБ ПНИПУ (elib.pstu.ru) |
ветствующих, например, включенному и выключенному состояниям объекта.
Нелинейное преобразование также применяется в системах измерений для растягивания отдельных участков диапазона в целях повышения точности передачи на этих участках, а также в некоторых специальных системах для упрощения аппаратуры.
Модуляцией называется процесс управления одним из параметров переносчика информации, например значением постоянного тока, частоты, амплитуды, фазы синусоидального или импульсного тока, акустической, электромагнитной или другой волны, под воздействием передаваемого сигнала (модулирующей функции времени). Переносчиком информации является модулируемая функция времени.
Обычно применяют линейную модуляцию, при этом зависимость между значением воздействия и значением модулируемого параметра выбирается линейной. Модуляция в большинстве случа- ев применяется для переноса спектра частот из области нижних в область более высоких, при согласовании сигнала с каналом связи по спектру.
Модуляция переменного синусоидального напряжения (переносчика)
u(t) Um sin( 0t 0 ) |
(1.4) |
может осуществляться по амплитуде Um, частоте или фазе . Возможна также одновременная модуляция, например по частоте и амплитуде и т.п.
Выражения для синусоидального напряжения, модулированного нормированной функцией (t) (изменяющейся от –1 до +1) соответственно для амплитудной (AM), частотной (×Ì) è фазовой
(ФМ) модуляций имеют вид:
u(t)AM |
Um [1 m (t)]sin( 0t 0 ); |
|
|
||
|
|
t |
|
|
|
|
|
; |
(1.5) |
||
u(t)×Ì |
Um 0t ä (t)dt 0 |
||||
|
|
0 |
|
|
|
u(t)ÔÌ |
Um sin 0t ä (t) 0 ), |
|
|
||
ãäå ä – девиация частоты (диапазон изменения частоты); ä – максимальное изменение фазы колебаний; m – глубина модуляции.
17
ELIB.PSTU.RU
Стр. 17 |
ЭБ ПНИПУ (elib.pstu.ru) |

Еще больше возможностей в выборе способов модуляции имеется при импульсной модуляции. Могут быть построены системы с ампли-
тудно-импульсной (ÀÈÌ), частотно-импульсной (×ÈÌ), фазоимпу-
льсной (ÔÈÌ), времяимпульсной (ÂÈÌ), широтно-импульсной (ШИМ) и различными видами кодоимпульсной модуляции (КИМ). Временные диаграммы для различного вида модуляции приведены на рис. 1.4.
Отличие ФИМ от ВИМ заключается главным образом в методе синхронизации. Если в ВИМ используется пошаговый метод синхронизации и при приеме выделяется (измеряется) интервал времени между синхронизирующим и информационным импульсами, то в ФИМ применяется циклическая, стартстопная синхронизация со стабильной тактовой частотой и измеряется при приеме интервал времени между условной начальной фазой и информационным импульсом. Для ВИМ допускается большее изменение тактовой частоты, но помехоустойчивость может быть меньшей.
Применяются также системы с двойной и тройной модуляцией (АМ –ЧМ, ФИМ – ЧМ, ФИМ – AM и др.), при которых два или три вида модуляции осуществляются последовательно. Так, при двойной модуляции AM – ЧМ сначала производится амплитудная модуляция, а затем частотная.
Процесс выделения первичной (модулирующей) функции из принятого сигнала в приемнике называется демодуляцией, èëè äå-
Рис. 1.4. Виды модуляции синусоидальных (à) и импульсных (á) колебаний
18
ELIB.PSTU.RU
Стр. 18 |
ЭБ ПНИПУ (elib.pstu.ru) |
тектированием. Модуляция и демодуляция являются частными случаями преобразования сигнала.
Модуляция и демодуляция позволяют перемещать спектр первичного сигнала по оси частот. Некоторые виды модуляции, например частотная, позволяют также повысить помехоустойчивость передачи сигналов.
Как отмечалось ранее, модуляция и кодирование применяются для преобразования сообщения в такой сигнал, который был бы лучше приспособлен для передачи по реальному каналу связи с помехами и изменяющимся во времени затуханием с заданной полосой частот. Они также применяются, если требуется уплотнение канала, заключающееся в передаче по общему каналу связи нескольких сигналов, т.е. для перехода к многоканальной передаче с временным, частотным или кодовым разделениями сигналов, описанными далее.
В процессе модуляции модулирующая функция (t) изменяет значение модулируемого параметра переносчика информации (см. рис. 1.4). Модуляция постоянного тока используется в измерительных системах – интенсивности. Естественно, что для передачи сигналов с модуляцией постоянного тока требуется канал связи в виде физической проводной линии, пропускающей постоянный ток с полосой частот, начиная от 0. Крупным недостатком такой модуляции в телеизмерении является прямая зависимость погрешности телеизмерений от изменения параметров канала связи (коэффициента передачи).
Значительно больше возможностей открывается при использовании для модуляции переменного или импульсного тока. В этом случае необязательно иметь физическую проводную линию, так как сигналы могут передаваться через трансформаторы, конденсаторы, линии, уплотненные по частоте, и т.п. Больше возможностей открывается и в выборе видов модуляции.
1.4. Спектры сигналов
Спектральное представление сигналов дает возможность определить, как передать с допустимым искажением по форме сигнал через электрические цепи, имеющие всегда ограниченную полосу пропус-
19
ELIB.PSTU.RU
Стр. 19 |
ЭБ ПНИПУ (elib.pstu.ru) |

кания. В первую очередь это относится к сравнительно узкополосным цепям и устройствам, электрическим фильтрам, усилителям, преобразователям, каналам связи и пр.
В основе спектральных методов лежит разложение периоди- ческих функций в ряд Фурье. Напомним основные правила разложения периодических и непериодических функций, широко используемого при описании сигналов.
Произвольная периодическая функция (t), удовлетворяющая условиям Дирихле (ограниченная, кусочно-непрерывная, имеющая конечное число экстремальных значений в течение периода) и условию периодич- ности, имеет вид:
(t) t n , |
(1.6) |
ãäå T – период; n – любое целое положительное число.
Такая функция может быть представлена рядом Фурье в комплексной форме:
|
|
t Ck e jk2 f1 . |
(1.7) |
Сумма слагаемых вида Ck e jk2 f1 берется по всем целым k îò
до . Каждое слагаемое, называемое гармоникой, представляет собой синусоидальное колебание с частотой kf1, кратной основной частоте (первой гармонике):
f 1 |
|
1 |
. |
(1.8) |
|
||||
|
|
T |
|
|
Комплексная амплитуда Ck ck e j k , ãäå ck  Ck
Ck  – модуль ам-
– модуль ам-
плитуды колебаний данной гармоники; k – начальная фаза данной гармоники.
Вычисление комплексной амплитуды (коэффициента разложения) производится однозначно по формуле
T
Ck 1 2 (t)e jk2 f1t dt. (1.9) T T2
20
ELIB.PSTU.RU
Стр. 20 |
ЭБ ПНИПУ (elib.pstu.ru) |