

Телемеханика и связь
..pdfRO (receiver output) – цифровой выход приемника; DE (driver enable) – разрешение работы передатчика; RE (receiver enable) – разрешение работы приемника; A – прямой дифференциальный вход/выход; B – инверсный дифференциальный вход/выход; Y – прямой дифференциальный выход (RS-422); Z – инверсный дифференциальный выход (RS-422).
Остановимся поподробнее на приемопередатчике RS-485. Поскольку приемник соединен с передатчиком, то во время приема нужно отключать передатчик, а во время передачи – приемник. Для этого служат управляющие входы – разрешение приемника (RE) и разрешения передатчика (DE). Òàê êàê âõîä RE инверсный, то его можно соединить с DE и переключать приемник и передатчик одним сигналом с любого порта контроллера. При уровне 0 – работа на прием, при 1 – на передачу.
Приемник, получая на дифференциальных входах (AB) разность потенциалов (UAB) переводит их в цифровой сигнал на выходе RO. Чу- вствительность приемника может быть разной, но гарантированный пороговый диапазон распознавания сигнала производители микросхем приемопередатчиков пишут в документации. Обычно эти пороги составляют ± 200 мВ. То есть, когда UAB > +200 мВ – приемник определяет 1, когда UAB < –200 мВ – приемник определяет 0. Если разность потенциалов в линии настолько мала, что не выходит за пороговые значения – правильное распознавание сигнала не гарантируется. Кроме того, в линии могут быть и не синфазные помехи, которые исказят столь слабый сигнал.
Входное сопротивление приемника со стороны линии (RAB) обычно составляет 12 кОм. Так как мощность передатчика не беспредельна, это создает ограничение на количество приемников, подклю- ченных к линии. Согласно спецификации RS-485 c учетом согласующих резисторов передатчик может вести до 32 приемников. Однако есть ряд микросхем с повышенным входным сопротивлением, что позволяет подключить к линии значительно больше 32 устройств.
Максимальная скорость связи по спецификации RS-485 может достигать 10 Мбод/с. Максимальное расстояние – 1200 м. Если необходимо организовать связь на расстоянии большем 1200 м или подключить больше устройств, чем допускает нагрузочная способность передатчика – применяют специальные повторители (репитеры).
91
ELIB.PSTU.RU
Стр. 91 |
ЭБ ПНИПУ (elib.pstu.ru) |
Основные параметры интерфейсов RS-485 è RS-422 приведены в табл. 6.1
Ò à á ë è ö à 6 . 1
Основные параметры интерфейсов
Параметры |
RS 422 |
RS 485 |
Допустимое число передатчиков/приемников |
1/10 |
32/32 |
Максимальная длина кабеля |
1200 ì |
1200 ì |
Максимальная скорость связи |
10 Ìáèò/ñ |
10 Ìáèò/ñ |
Диапазон напряжений «1» передатчика |
+2...+10 Â |
+1,5...+6 Â |
Диапазон напряжений «0» передатчика |
2... 10 Â |
1,5... 6 Â |
Диапазон синфазного напряжения передатчика |
3...+3 Â |
1...+3 Â |
Допустимый диапазон напряжений приемника |
7...+7 Â |
7...+12 Â |
Пороговый диапазон чувствительности приемника |
±200 ì |
±200 ì |
Максимальный ток короткого замыкания драйвера |
150 ìÀ |
250 ìÀ |
Допустимое сопротивление нагрузки передатчика |
100 Îì |
54 Îì |
Входное сопротивление приемника |
4 êÎì |
12 êÎì |
Максимальное время нарастания сигнала передатчика |
10 % áèòà |
30 % áèòà |
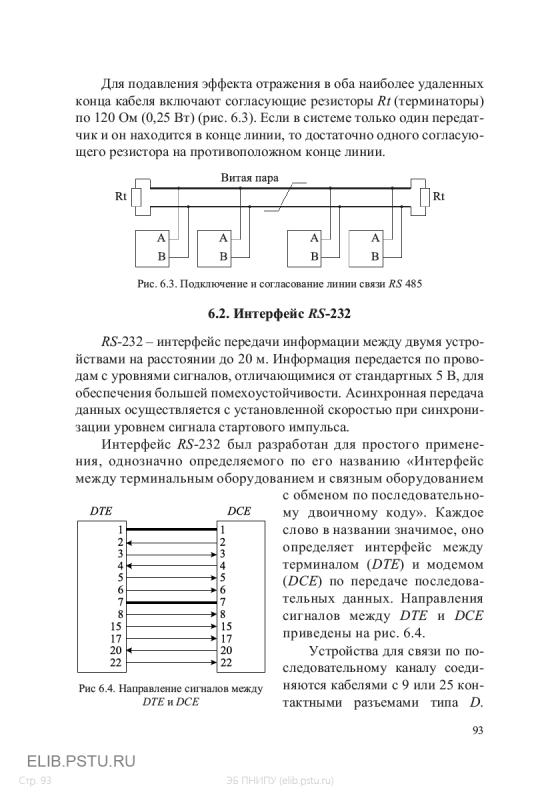
При больших расстояниях между устройствами, связанными по витой паре, и высоких скоростях передачи начинают проявляться так называемые эффекты длинных линий. Причина этому – конечность скорости распространения электромагнитных волн в проводниках. Скорость эта существенно меньше скорости света в вакууме и составляет немногим больше 200 мм/нс. Электрический сигнал имеет также свойство отражаться от открытых концов линии передачи и ее ответвлений. Грубая аналогия – желоб, наполненный водой. Волна, созданная в одном конце, идет по желобу и, отразившись от стенки в конце, идет обратно, отражается опять и так далее, пока не затухнет. Для коротких линий и малых скоростей передачи этот процесс происходит так быстро, что остается незамеченным. Однако время реакции приемников – десятки/сотни нс. В таком масштабе времени несколько десятков метров электрический сигнал проходит отнюдь не мгновенно. И если расстояние достаточно большое, фронт сигнала, отразившийся в конце линии и вернувшийся обратно, может исказить текущий или следующий сигнал. В таких случаях нужно каким-то образом подавлять эффект отражения.
92
ELIB.PSTU.RU
Стр. 92 |
ЭБ ПНИПУ (elib.pstu.ru) |
ГЛАВА 7. ПРОТОКОЛЫ ПЕРЕДАЧИ ДАННЫХ
И ПРОМЫШЛЕННЫЕ СЕТИ
7.1. Протокол CAN
CAN (Controller Area Network) – это последовательный протокол связи с эффективной поддержкой распределения контроля в реальном времени и очень высоким уровнем безопасности.
Основное назначение: организация передачи информации в сложных условиях, таких как среды с высоким уровнем различного рода помех. Этот протокол передачи применяется в автомобильной электронике, машинных устройствах управления, датчиках при передаче информации со скоростями до 1 Мбит/с.
Протокол CAN имеет следующие основные характеристики:
1.Каждое сообщение имеет определенный приоритет (идентификатор – бит, определяющий статический приоритет сообщения
âтечение доступа к шине).
2.Существуют гарантированные времена ожидания (сообщения с низким приоритетом будут переданы через определенный промежуток времени, невзирая на наличие сообщений с более высоким приоритетом).
3.Гибкость конфигурации (узел может быть добавлен в CAN-сеть без каких-либо изменений в программном или аппаратном обеспече- нии какого-либо узла в сети). К сети CAN может одновременно быть подключено не более 64 узлов.
4.Групповой прием с временной синхронизацией (любое число узлов может одновременно получать и реагировать на одно и то же сообщение).
5.Система непротиворечивости данных (внутри сети CAN гарантировано, что сообщение принято всеми узлами или ни одним узлом).
96
ELIB.PSTU.RU
Стр. 96 |
ЭБ ПНИПУ (elib.pstu.ru) |
6.Обнаружение ошибок и сигнализация (сеть CAN имеет несколько способов обнаружения ошибок, если ошибка обнаружена, то сообщение помечается и оно будет передано вновь).
7.Автоматическая ретрансляция разрушенных сообщений (разрушенные сообщения помечаются узлом, обнаружившим ошибку, сообщения прерываются и будут переданы снова).
8.Различие между временными ошибками и постоянными отказами узлов и автономное отключение дефектных узлов.
7.2. Протокол MODBUS
Стандартные MODBUS-порты используют RS-232 с совместимым последовательным интерфейсом. Контроллеры соединяются, используя технологию «главный – подчиненный», при которой только одно устройство (главный) может инициировать передачу (сделать запрос). Другие устройства (подчиненные) передают запрашиваемые главным устройством данные или производят запрашиваемые действия.
Главный может адресоваться к индивидуальному подчиненному или инициировать широкую передачу сообщения на все подчи- ненные устройства. Подчиненное устройство возвращает сообщение в ответ на запрос, адресуемый именно ему. Ответы не возвращаются при широковещательном запросе от главного.
Каждому подчиненному устройству присваивается адрес в пределах от 1 до 247. Адрес 0 используется для широковещательной передачи, его распознает каждое устройство. Когда протокол MODBUS используется на более высоком уровне сети, широковещательная передача может не поддерживаться или может быть реализована другими методами.
В сетях MODBUS может быть использован один из двух способов передачи: ASCII èëè RTU. Пользователь выбирает необходимый режим вместе с другими параметрами (скорость передачи, режим паритета и т.д.) во время конфигурации каждого контроллера.
При использовании ASCII-режима каждый байт сообщения передается как два ASCII символа (0-9, A-F). Главное преимущество этого способа – время между передачей символов может быть до 1 с без возникновения ошибок при передаче. В режиме RTU используется двоичная 8-битовая кодировка.
97
ELIB.PSTU.RU
Стр. 97 |
ЭБ ПНИПУ (elib.pstu.ru) |
Стандартная MODBUS-сеть использует два метода контроля ошибок: проверку на четность (even/odd) и контрольную сумму. Обе эти проверки генерируются в головном устройстве. Подчиненное устройство проверяет каждый байт и все сообщение в процессе приема.
Пользователь может устанавливать продолжительность интервала тайм-аута, в течении которого головное устройство будет ожидать ответа от подчиненного. Если подчиненный обнаружил ошибку передачи, то он не формирует ответ главному.
7.3. Протокол EtherNet/IP
EtherNet/IP означает промышленный протокол Ethernet. Это открытый промышленный сетевой стандарт, который использует стандартные микросхемы и физическую среду передачи информации сети Ethernet.
Стандарты Ethernet определяют проводные соединения и электрические сигналы на физическом уровне, формат кадров и протоколы управления доступом к среде. Ethernet в основном описывается стандартами IEEE группы 802.3.
В стандарте первых версий (Ethernet 1.0 è Ethernet 2.0) указано, что в качестве передающей среды используется коаксиальный кабель, в дальнейшем появилась возможность использовать витую пару и оптический кабель.
Метод управления доступом – множественный доступ с контролем несущей и обнаружением коллизий (CSMA/CD, Carrier Sense Multiple Access with Collision Detection), скорость передачи данных 10 Мбит/с, размер пакета от 72 до 1526 байт, описаны методы кодирования данных. Количество узлов в одном разделяемом сегменте сети ограничено предельным значением в 1024 рабо- чие станции (спецификации физического уровня могут устанавливать более жесткие ограничения, например, к сегменту тонкого коаксиала может подключаться не более 30 рабочих станций, а к сегменту толстого коаксиала – не более 100). Однако сеть, построенная на одном разделяемом сегменте, становится неэффективной задолго до достижения предельного значения количества узлов.
98
ELIB.PSTU.RU
Стр. 98 |
ЭБ ПНИПУ (elib.pstu.ru) |
В 1995 году принят стандарт IEEE 802.3u Fast Ethernet со скоростью 100 Мбит/с и появилась возможность работы в режиме полный дуплекс. В 1997 году был принят стандарт IEEE 802.3z Gigabit Ethernet со скоростью 1000 Мбит/с для передачи по оптоволокну и еще через два года для передачи по витой паре.
EtherNet/IP используется для обмена сообщениями ввода-выво- да в реальном времени или неявного обмена сообщениями:
·Информационный обмен. Пересылка некритичных ко времени данных – пакет обычно имеет большой размер. Информационный обмен данными является краткосрочными явными связями между инициатором и одним устройством назначения.
·Данные ввода-вывода. Пересылка критичных ко времени данных – обычно меньший размер пакета. Обмен данными ввода-выво- да является долгосрочными неявными связями между одним инициатором и любым количеством устройств назначения.
·Взаимоблокировка реального времени. Циклическая синхронизация данных между одним процессором-производителем и любым количеством процессоров-потребителей.
7.4. Промышленная сеть ControlNet
Ñåòü Allen-Bradley ControlNet является современной управляющей сетью, которая удовлетворяет требованиям приложений реального времени с высокой пропускной способностью. Сеть ControlNet объединяет функциональность сети ввода-вывода и сети обмена «точка – точка», обеспечивая высокую производительность для обеих функций.
Ñåòü ControlNet обеспечивает детерминированные периоди- ческие пересылки всех критических управляющих данных, в дополнение к поддержке пересылки некритичных ко времени данных. Фирменный метод доступа к носителю, используемый в сети ControlNet, приводит к детерминированной доставке критичных ко времени данных (запланированных), назначая им более высокий приоритет, чем для некритичных ко времени данных (незапланированных). В результате, обновление входов-выходов и взаимные блокировки контроллеров всегда берут приоритет над загрузкой/сохранением программ и обменом сообщениями.
99
ELIB.PSTU.RU
Стр. 99 |
ЭБ ПНИПУ (elib.pstu.ru) |
Основные характеристики:
·Поддерживает программирование, межпроцессорное управление и управление вводом-выводом на одном сегменте без влияния на ввод-вывод, критичный ко времени.
·Опции избыточности носителя и искробезопасности.
·Обеспечивает функции сетей Data Highway Plus (высокоскоростной передачи данных) и универсального Remote I/O (дистанционный ввод-вывод) при 5 Мбит/с.
·Обеспечивает высокую пропускную способность данных, что улучшает производительность ввода-вывода и взаимные блокировки контроллеров.
·Поддерживает максимум 99 узлов, без минимального расстояния между ними.
·Обеспечивает простую, гибкую установку и настройку, которые не требуют специальных инструментов.
·Позволяет вам иметь доступ к сети из любого узла для программирования процессора контроллера и диагностики.
·Широковещание данных как входов, так и обмена, для сокращения программирования.
·Включает улучшенную системную диагностику, которая облегчает конфигурирование и поддержку. Многоканальные системы связи с частотно-временным разделением сигналов
·Широкий выбор устройств ввода-вывода.
·Обеспечивает детерминированную циклическую передачу данных от/к устройствам дискретного и аналогового ввода-вывода.
·Позволяет вам выбрать время обновления входов-выходов и блокировок между процессорами контроллеров, которое соответствует требованиям вашего приложения.
·Позволяет процессорам связываться с несколькими устройствами за одну пересылку.
·Устраняет необходимость программирования блок-трансферов.
·Совместим с большим числом текущих продуктов Allen-Bradley
èбудет совместимым с еще большим в будущем.
·Обеспечивает работу в средах с высоким уровнем помех с помощью волоконно-оптических сегментов.
·Сообщения от/к узлу на одном сегменте ControlNet могут быть маршрутизированы через шлюз ControlLogix к узлу на другом сегменте ControlNet или сегменте Ethernet.
100
ELIB.PSTU.RU
Стр. 100 |
ЭБ ПНИПУ (elib.pstu.ru) |