

Уравнивание спутниковых сетей. Предварительная оценка точности проек
.pdfМинистерство образования и науки Российской Федерации
Государственное образовательное учреждение высшего профессионального образования «Пермский государственный технический университет»
С.В. Гришко
УРАВНИВАНИЕ СПУТНИКОВЫХ СЕТЕЙ. ПРЕДВАРИТЕЛЬНАЯ ОЦЕНКА ТОЧНОСТИ ПРОЕКТОВ СПУТНИКОВЫХ ИЗМЕРЕНИЙ
Утверждено Редакционно-издательским советом университета
в качестве учебно-методического пособия
Издательство Пермского государственного технического университета
2010
УДК 528
Г82
Рецензент:
канд. техн. наук, старший преподаватель А.В. Заморин (Пермский государственный технический университет),
канд. техн. наук, доцент В.Б. Замотин (ООО «Центр экспертизы “Hедра Урала”»)
Гришко, С.В.
Г82 Уравнивание спутниковых сетей. Предварительная оценка точности проектов спутниковых измерений: учебно-метод. пособие / С.В. Гришко. – Пермь: Изд-во Перм. гос. техн. ун-та, 2010. – 20 с.
Приведены общие сведения из теории уравнивания спутниковых сетей. В матричном изложении рассмотрены основные способы уравновешивания спутниковых измерений, такие как коррелатный и параметрический. Описан алгоритм предварительной оценки точности проектов спутниковых измерений, дан пример расчета.
Предназначено для студентов специальностей «Прикладная геодезия» и «Маркшейдерское дело».
УДК 528
© ГОУ ВПО «Пермский государственный
технический университет», 2010
2
|
СОДЕРЖАНИЕ |
|
1. |
Уравнивание спутниковых сетей.................................................... |
4 |
|
1.1. Уравнивание спутниковых сетей коррелатным способом... |
6 |
|
1.2. Уравнивание спутниковых сетей параметрическим |
|
|
способом........................................................................................... |
8 |
2. |
Предварительная оценка точности проектов спутниковых |
|
измерений............................................................................................. |
10 |
|
Список литературы.............................................................................. |
19 |
|
3
1. УРАВНИВАНИЕ СПУТНИКОВЫХ СЕТЕЙ Общие сведения
Геодезические сети независимо от технологии их создания содержат избыточные измерения, при помощи которых контролируются и уточняются результаты наблюдений. С одной стороны, избыточные измерения позволяют выполнить оценку точности выполненных работ, с другой стороны, они приводят к неоднозначным
значениям координат и высот пунктов геодезических построений. |
|||||
|
|
A |
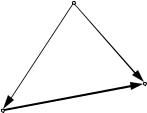
На рис. 1 изображен фрагмент спут- |
||
|
|
никовой сети, в котором, например, |
|||
|
|
|
|||
|
|
|
положение |
пункта В |
относительно |
|
3 |
1 |
пункта А можно определить как по |
||
|
|
вектору 1, так и по векторам 2 и 3 че- |
|||
|
|
|
|||
|
|
B |
рез пункт С. |
|
|
C |
|
2 |
С целью устранения неоднознач- |
||
|
ности результатов, нахождения наи- |
||||
Рис. 1. Фрагмент спутниковой |
более вероятных поправок и оценки |
||||
точности |
измерений |
выполняется |
|||
|
|
сети |
процесс уравнивания. |
Эта задача ре- |
|
|
|
|
|||
шается по методу наименьших квадратов (МНК) минимизацией выражения ∑ pv2 , где p – веса измерений или координат, а v – соот-
ветствующие поправки в измеренные величины. Уравнивание геодезических сетей является важнейшим этапом их создания.
До вычислений следует решить, что уравнивать, как определять веса, учитывать или нет корреляцию измерений, и выбрать способ уравнивания.
При уравновешивании спутниковых сетей уравниванию подлежат полученные (измеренные) приращения координат, т.е. составляющие DX, DY, DZ векторов. В дальнейшем они будут рассматриваться как измеренные величины. Такое допущение существенно упрощает обработку.
4
Веса pi определяются отношениями дисперсии µ2 измерения, вес которого принят за единицу (единицу веса) к дисперсиям σi2 текущих измерений:
pi =µ2 / σi2.
Эти дисперсии для приращений координат могут быть вычислены по формулам:
σDXi ,DYi ,DZi = a +bDкм,
µ = a +bDкм0 ,
где D – длина вектора в километрах; D0 – произвольная величи-
км км
на, числено равна среднему из длин векторов уравниваемой сети; коэффициенты α = 3…10 мм; b = 1…2 мм/км. Часто полагают µ2 = 1. Веса pi располагают на главной диагонали диагональной весовой матрицы Рд. Если измерения равноточные, то все веса одинаковы, равны 1 и весовая матрица становится единичной: Р = Е.
Строго говоря, измеренные величины DX, DY и DZ являются взаимно зависимыми, поэтому для правильной математической обработки необходимо знать зависимость (корреляцию) их ошибок. Корреляция случайных величин описывается коэффициентом корреляции r, который характеризует степень линейной зависимости случайных величин и изменяется в пределах от 0 до ±1. Положительное значение r указывает на то, что при возрастании одной случайной величины другая также возрастает, и наоборот, отрицательное значение r указывает на то, что при возрастании одной случайной величины другая имеет тенденцию к убыванию.
Для учета корреляций весовые подматрицы каждого вектора определяют из выражения
Pi = Pд1/i 2Ri−1Pд1/i 2 ,
где Pд1/i 2 – диагональная подматрица, элементы которой вычисляются извлечением квадратного корня из элементов диагональной
5
весовой матрицы i-го вектора; Ri – корреляционная матрица i-го вектора
1 |
rxy |
rxz |
|
|
|
|
|
|
|
R = ryx |
1 |
ryz |
, |
|
rzx |
rzy |
1 |
|
|
|
|
|
|
|
где rxy, rxz, ryz – коэффициенты корреляции ошибок компонент вектора. Полная весовая матрица измерений формируется из подматриц векторов, расположенных на главной диагонали.
Неучет корреляций, по данным различных источников, искажает поправки в результаты измерений до 20 %.
1.1. Уравнивание спутниковых сетей коррелатным способом
В случае уравнивания спутниковых сетей коррелатным способом выясняют, какие в сети возникают условия и вычисляют невязки. В сетях с измеренными приращениями координат вид условий зависит от того, как проложен векторный ход. Если векторный ход образует замкнутый контур, то векторное условие имеет вид
ΣDij = 0,
где вектор Dij соединяет пункты i и j. Эта запись означает, что суммы приращений координат по каждой координатной оси в замкнутой фигуре равны нулю. Когда ход проложен между векторами RI и RII двух опорных пунктов, координаты которых не подлежат исправлению, условие принимает вид
ΣDij −(RII −RI ) =0.
Каждое из записанных векторных условий может быть разложено по трем координатным осям и представлено тремя скалярными формулами.
6
Подстановка в уравнения условий составляющих векторов DX, DY, DZ, полученных из измерений, приведет к появлению невязок. Например, по оси Х для невязок получим:
WX =ΣDxij −( XII − XI ).
Аналогично получим невязки WY и WZ. Количество невязок r равно утроенному числу избыточно измеренных векторов.
Чтобы устранить невязки, следует исправить величины DX, DY, DZ соответственно поправкам VX, VY, VZ. Так, для векторного треугольника с номерами вершин 1, 2, 3 и векторами, ориентированными по часовой стрелке, условие по оси Х будет иметь вид
VX 12 +VX 23 +VX 31 +WX 123 =0.
Аналогичные уравнения условий будут по осям Y и Z. Для всех условий в сети получим систему уравнений
BV + W = 0.
Элементами векторов V и W соответственно являются искомые поправки и вычисленные невязки; матрица В содержит коэффициенты, стоящие перед поправками в условных уравнениях. Как видим, эти коэффициенты равны +1, 0 или –1.
Коррелатный способ МНК позволяет найти такие поправки VX, VY, VZ, что взвешенная сумма их квадратов будет минимальна при сохранении всех указанных геометрических условий. Векторы коррелат K и поправок V вычисляют по формулам:
K = −(BP−1BT )−1W ,
V = P−1BT K.
По результатам уравнивания вычисляют среднюю квадратическую погрешность (СКП) единицы веса:
µ2 =V T PV / r или µ2 =W T (BP−1BT )−1W / r.
7
|
Для оценки точности измеренных величин и координат пунктов |
|
в коррелатном уравнивании необходимо составление оцениваемых |
||
функций, что усложняет эту процедуру. |
||
|
В малых сетях уравнивание коррелатным способом МНК вы- |
|
полняется достаточно просто. Так, если сеть состоит из одного тре- |
||
угольника, то в треугольнике невязки распределяются по соответст- |
||
вующим составляющим векторов с обратным знаком, пропорцио- |
||
|
|
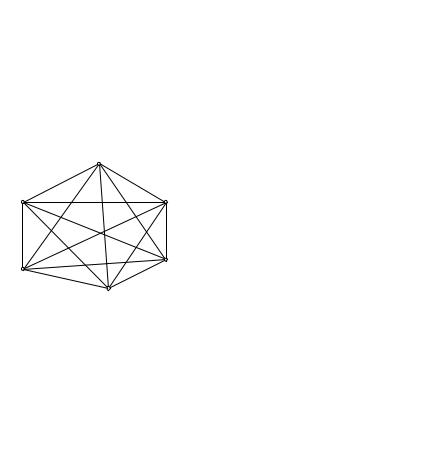
нально обратным весам. В сложных |
|
1 |
сетях с большим количеством избы- |
|
|
точных измерений (рис. 2) составле- |
6 |
2 |
ние условных уравнений (особенно |
|
|
автоматизированно) усложняется, так |
|
|
как необходимый их набор неодно- |
|
3 |
значен: для одной и той же сети |
5 |
|
можно составить несколько эквива- |
|
4 |
лентных систем условных уравнений, |
|
каждая из которых составит свою |
|
|
Рис. 2. Спутниковая сеть |
|
|
систему нормальных уравнений, ко- |
|
с большой обусловленностью |
||
|
|
торые приведут в итоге к получению |
|
|
одинаковых результатов. |
|
Преимуществом коррелатного уравнивания является возмож- |
|
ность реализации предварительного контроля качества измерений |
||
и исходных данных по невязкам условных уравнений. На заключи- |
||
тельном этапе контроль правильности вычислений достаточно на- |
||
дежно оценивается нулевыми значениями этих невязок. |
||
1.2.Уравнивание спутниковых сетей параметрическим способом
Чтобы выполнить уравнивание спутниковых сетей параметрическим способом, вычисляют приближенные координаты определяемых пунктов. Обозначим их X0, Y0, Z0. В результате уравнивания определяют в эти координаты поправки (параметры) δx, δy, δz и поправки VX, VY, VZ в измеренные приращения координат DX, DY,
8
DZ. Для поправки, например, VXij в соответствующую DXij вектора, соединяющего пункты i и j, можно составить уравнение
VXij + DXij =( X0 j +δxj ) −( X0i +δxi ).
Отсюда
VXij = −δxi +δxj +lXij ,
где lXij =( X0 j − X0i ) −DXij .
Аналогичными будут уравнения поправок VYij, VZij. Всего таких уравнений 3n, где n – количество измеренных векторов.
Координаты опорных пунктов исправлению не подлежат. Поэтому в уравнениях поправок в составляющие векторов, опирающихся на один или два исходных пункта, поправки в координаты этих пунктов должны равняться нулю.
Для всех уравнений поправок в векторно-матричной записи будем иметь:
V = Aδ + L,
где V – вектор с 3n поправками в измеренные величины; δ – вектор
с3k поправками в координаты k определяемых пунктов: L – вектор
с3n величинами l; А – матрица коэффициентов уравнений поправок размером 3n × 3k. Ее элементами будут +1, 0 или –1.
Требование МНК, чтобы взвешенная сумма квадратов поправок VTPV была минимальной, приводит к условию VTPV = 0. Отсюда следует система нормальных уравнения для вычисления параметров δ:
AT PAδ+ AT PL =0.
Для оценки точности необходимо вычислить:
–СКП единицы веса
µ2 =V T PV / 3(n −k);
–ковариационную матрицу поправок в координаты
9
Q=(AT PA)−1 ;
–СКП q-й координаты в векторе поправок δ
σ2 =µ2Qqq ,
где Qqq – диагональный элемент на пересечениях q-х столбца и строки в матрице Q. Совпадение значений СКП единицы веса, вычисленных до и после уравнивания, свидетельствует о правильности стратегии выбора весов.
Все формулы верны и для коррелированных измерений.
Кпреимуществам параметрического способа уравнивания можно отнести возможность автоматического формирования параметрических уравнений связи, независимо от количества пунктов
иобусловленности сети. Кроме того, при параметрическом уравнивании обратную матрицу нормальных уравнений можно использовать для определения искомых параметров и общей оценки точности уравненных элементов сети. Отмеченные особенности объясняют преимущественное использование этого способа уравнивания при автоматизированной обработке плановых сетей.
Кнедостаткам параметрического способа относят высокий порядок матриц нормальных уравнений, равный утроенному количеству пунктов при обработке пространственных сетей, и невозможность реализации контроля измерений по невязкам в замкнутых фигурах без специальных преобразований.
2. ПРЕДВАРИТЕЛЬНАЯ ОЦЕНКА ТОЧНОСТИ ПРОЕКТОВ СПУТНИКОВЫХ ИЗМЕРЕНИЙ
Предварительный расчет точности определения планового и высотного положения пунктов спутниковых сетей относительно исходных пунктов может быть реализован строгим способом на основе параметрического метода. Порядок вычислений приведен ниже.
10