

Инерциальная навигационная система И–21 (96
..pdf–рама монтажная РМ-40.
Моноблок М5-5 составляет основу системы И-21. Он содержит блок инерциальных чувствительных элементов (гироплатформу), электронные устройства и цифровой вычислитель, обеспечивающие навигацию в географической системе координат и относительно выбранного маршрута, выдачу сигналов угловой ориентации самолета и управляющего сигнала для стабилизации самолета относительно маршрута, прием корректирующих сигналов по координатам, скорости и курсу от других источников навигационной информации.
Моноблок обеспечивает выставку методом гирокомпасирования, выставку по заданному курсу, расчет навигационных и маршрутных данных, автономный наземный контроль, прием входных данных, формирование и выдачу выходных данных.
Монтажная рама РМ-23 осуществляет механическую связь и согласование осей моноблока со строительными осями самолета, а также связь с бортовыми источниками электропитания и бортовой пневмосетью, обдув электроники и гироскопического отсека.
Блок питания БП-40 служит для преобразования напряжения бортовой сети (~115 В, 400 Гц) в нестабилизированное напряжение постоянного тока 29 В, из которого в моноблоке вырабатываются все виды питания чувствительных элементов и электронных плат. Цепи обогрева моноблока питаются через БП-40 от отдельной фазы бортовой сети (~115 В, 400 Гц). Кроме того, БП-40 выполняет ряд функций управления и контроля энергопитания.
Пульт управления режимов ПУР служит для задания рабочих режимов: «Обогрев», «Выставка», «Навигация», «Курсовертикаль», а также вспомогательных технологических режимов: «Контроль», «Балансировка». На ПУР имеются световые транспаранты, сигнализирующие о следующих состояниях системы: НЕ ГОТ (не готов), KB (курсовертикаль), ОТКАЗ (отказ), ВНИМ (внимание), ПИТ (питание).
Устройство ввода и индикации УВИ является дисплеем, служа-
щим для связи экипажа с микроЭВМ моноблока. УВИ предоставляет возможность ввода в микроЭВМ моноблока посредством переключателей, именных кнопок и кнопок цифрового наборного поля фиксированного набора именной и числовой информации. С помощью трех
11
его цифровых индикаторов отображается выходная числовая информация, а с помощью транспарантов – именная.
Технические характеристики системы
1. Точностные характеристики:
–погрешность определения местоположения – 3,7 км за каждый час работы в течение 10 ч (при дозвуковом полете) и 6,0 км за каждый час работы в течение 5 ч (при сверхзвуковом полете);
–погрешность определения составляющих путевой скорости – не более 12 км/ч;
–погрешность определения истинного курса в цифровом представлении – не более (0,200 + 0,025 t)° на интервале времени t не более 10 ч, в аналоговом представлении – не более 1°;
–погрешность определения приведенного курса – не более 1°;
–погрешность определения углов крена и тангажа в диапазоне ±20° – не более 0,1° при работе в режиме «Навигация» и не более 0,5°
врежиме «Курсовертикаль»;
–погрешность определения ускорения в цифровом представлении – не более 0,015g (0,147 м/с2), в аналоговом представлении – не более 0,01g (0,098 м/с2).
2. Система обеспечивает автономную выставку по курсу на широ-
тах не более 70° с точностью 12′. На широтах более 70° выставку следует проводить в режиме заданного курса (ЗК), а при его отсутствии –
врежиме курсовертикали (KB).
3.Время готовности системы – не более 15 мин при температуре окружающей среды более +20 °С и не более 25 мин при температуре
–60 °С.
4. Время непрерывной работы системы – не более 30 ч. Потребляемый ток по цепям обогрева с напряжением 115 В, и час-
тотой 400 Гц – до 10 А, по цепям основного питания 115 В, 400 Гц – до 4,5 А; по цепям вспомогательного источника питания 27 В – до 8 А, по цепям электроламп подсветки пультов напряжением 6 В, 400 Гц – до 1 А, по цепям обмоток возбуждения СКТ 36 В, 400 Гц – до 1 А.
12

Условия эксплуатации
Система И-21 сохраняет свои характеристики в следующих условиях:
–высота полета – не более 20 км;
–скорость полета – не более 3000 км/ч;
–угловые скорости вокруг продольной оси самолета – не более 20 %, вокруг нормальной оси – не более 15 %;
–угловые ускорения вокруг продольной оси самолета - не более
40 o c 2 . вокруг поперечной и нормальной осей – не более 20 o c 2 ;
–воздействие синусоидальной вибрации до 2g при частоте до
2000 Гц;
–воздействие ударных ускорений до 4g;
–рабочая температура окружающей среды ±60 °С, при этом в диапазоне от +30 до +60 °С при условии обдува системы от самолетной пневмосети с температурой воздуха от –15 до +30 °С и относительной влажностью не более 98 %;
–расположение в герметизированной зоне (давление более 560 мм рт. ст.) и в зоне пониженного давления (давление до 40 мм рт. ст.).
ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
В состав лабораторной установки входит комплект блоков системы И-21 (МБ-5, БП-40, УВИ, ПУР-2, РМ-23), соединенных между собой и со щитками электропитания соответствующими жгутами. Блок МБ-5 в лаборатории установлен на поворотном стенде, обеспечивающем возможность разворота моноблока вокруг трех взаимно перпендикулярных осей на заданные углы. Нулевое азимутальное положение стенда соответствует ориентации продольной оси моноблока на север.
Включение системы и управление режимами работы осуществляется поворотом переключателей на ПУР-2. Исходное положение основного и вспомогательного переключателей – «ОТКЛ». При перево-
13
де основного переключателя в положение «ОБОГР» включается только обогрев корпуса. Системы термостатирования платформы, гироскопов и акселерометров не задействованы.
При переводе основного переключателя в положение «ВЫСТ» включаются контуры обогрева платформы, гироскопов и акселерометров. Оси карданова подвеса гироплатформы приводятся к осям корпуса моноблока, осуществляется разгон гиромоторов и система переключается в режим аналогового горизонтирования. В лабораторной установке системы И-21 введена 5-минутная задержка включения режима «ВЫСТ» в целях исключения повторного запуска гиромоторов до окончания их выбега.
По окончании выставки система может быть переключена в режим «Навигация» поворотом основного переключателя в положение «НАВИГ».
Установка основного переключателя ПУР-2 в положение «КВ» переводит систему в режим «Курсовертикаль».
Вспомогательный переключатель кроме основного положения «ОТКЛ» имеет положения «Б» (балансировка) и «К» (контроль). В положении «Б» реализуется технологический режим балансировки ИНС и вводятся балансировочные коэффициенты в БЦВМ. В положении «К» проводится калибровка ИНС и встроенный контроль точности функционирования.
На блоке ПУР-2 расположено табло с пятью транспарантами. Транспарант «НЕ ГОТ» загорается в режимах «ВЫСТ», «Б» и «К». Если при переходе в режим «Навигация» вспомогательный переключатель находится в положении «ОТКЛ», транспарант «НЕ ГОТ» гаснет.
Транспарант «ВНИМ» загорается в режиме «Выставка» при отклонении рассчитанного значения «северной» скорости дрейфа гироплатформы от значения, хранящегося в БЦВМ, на величину, превы-
шающую 0,042 º/ч.
Транспарант «КВ» соответствует режиму «Курсовертикаль». Транспарант «ОТКАЗ» загорается при отказе ИНС.
Транспарант «ПИТ» загорается при падении напряжения питания постоянного тока ниже 24 В.
14
УКАЗАНИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ
1.К работе с системой допускаются только лица, ознакомившиеся с требованиями техники безопасности.
2.Включение источников питания и подсоединение к ним прибора выполняет преподаватель.
3.Категорически воспрещается:
а) перемещать прибор, отсоединять и подсоединять кабели и жгуты при включенном электропитании;
б) нарушать последовательность выполнения операций, указанную в описании.
4. В случае возникновения неисправностей в работе следует немедленно обратиться к преподавателю.
ПОРЯДОК ПРОВЕДЕНИЯ ИСПЫТАНИЙ
Целью испытаний системы И-21 является проверка циклограмм выставки системы по заданному курсу (ЗК), методом одинарного гирокомпасирования (ОГК) и определение точностных характеристик системы в режиме «Навигация» после выставки по ЗК и ОГК.
В начале испытаний необходимо установить стенд с системой И-21 в нулевое положение (разъемы системы направлены на север). Перевести основной и вспомогательный переключатели ПУР-2 в положение «ОТКЛ».
1. Проведение выставки системы по заданному курсу (ЗК) – рис. 4.
1.1.Перевести основной переключатель на ПУР-2 в положение «ВЫСТ».
1.2.Установить переключатель «Параметры» УВИ в положение
ИК/ПГ.
1.3.Приблизительно через 5 мин после перевода основного переключателя на ПУР-2 в положение «ВЫСТ» проконтролировать появление в нижней строке табло УВИ показателя готовности «90». Зафиксировать время появления ПГ = 90.
15
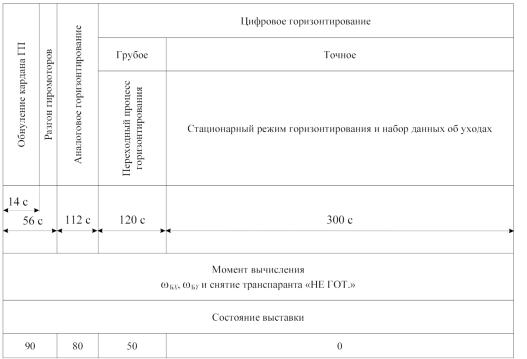
Рис. 4. Циклограмма выставки по ЗК
16
1.4.Проконтролировать появление в нижней строке табло УВИ показателя готовности «80». Зафиксировать время появления ПГ = 80.
1.5.Установить переключатель «Параметры» УВИ в положение ЗПУ/ПУ. Записать исходные балансировочные значения скоростей
дрейфов гироплатформы ωбx (верхняя строка табло УВИ) и ωбy (нижняя строка табло УВИ)
1.6. Установить переключатель «Параметры» УВИ в положение ИК/ПГ. Ввести значение истинного курса ИК = 0°. Последовательность ввода истинного курса описана в приложении 1.
1.7.Установить переключатель «Параметры» УВИ в положение
φ/ λ. Ввести координаты места φ = 55°45,9΄, λ = 37°41,4΄. Последовательность ввода координат описана в приложении 1.
1.8.Установить переключатель «Параметры» УВИ в положение ИК/ПГ. Контролировать появление и фиксировать время изменения показателя готовности в соответствие с циклограммой выставки по ЗК
(см. рис. 4).
1.9.По окончании выставки (ПГ = 0) установить переключатель «Параметры» УВИ в положение ЗПУ/ПУ и записать новые балансировочные значения скоростей дрейфов.
2. Определение точностных характеристик системы в режиме «Навигация» после выставки по ЗК.
2.1.Установить основной переключатель на ПУР-2 в положение «НАВИГ» и зафиксировать время переключения.
2.2.Установить переключатель «Параметры» УВИ в положение «Контр» и записывать значения углов крена, тангажа, гироскопиче-
ского курса, истинного курса и путевых скоростей Vx, Vy каждые 2 мин в течение 40 мин в таблицу (см. ниже). Пользоваться методикой, изложенной в приложении 2.
2.3. Установить основной переключатель на ПУР-2 в положение «ВЫСТ». Система переключится из режима «Навигация» в режим «Выставка» с показателем готовности ПГ = 80.
3.Проведение выставки системы методом ОГК – рис. 5.
3.1. Установить переключатель «Параметры» УВИ в положение ЗПУ/ПУ. Записать исходные балансировочные значения скоростей дрейфов гироплатформы ωбx (верхняя строка табло УВИ) и ωбy (нижняя строка табло УВИ).
17
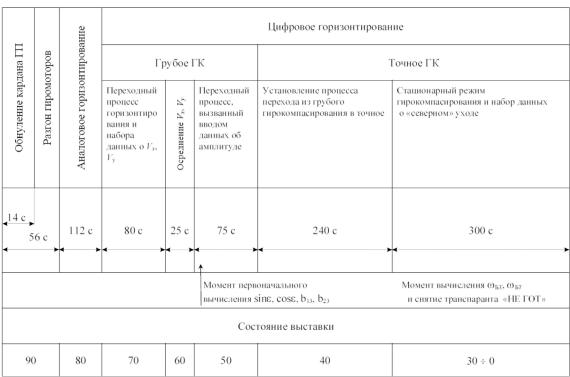
Рис. 5. Циклограмма выставки методом ОГК
17
3.2.Установить переключатель «Параметры» УВИ в положение φ/λ. Ввести координаты места φ = 55°45,9΄, λ = 37°41,4΄. Последовательность ввода координат описана в приложении 1.
3.3.Установить переключатель «Параметры» УВИ в положение ИК/ПГ. Контролировать появление и фиксировать время изменения показателя готовности в соответствие с циклограммой выставки методом ОГК (см. рис. 5).
3.4.По окончании выставки (ПГ = 00) установить переключатель «Параметры» УВИ в положение ЗПУ/ПУ и записать новые балансировочные значения скоростей дрейфов.
4. Определение точностных характеристик системы в режиме «Навигация» после выставки методом ОГК.
4.1.Установить основной переключатель на ПУР-2 в положение «НАВИГ» и зафиксировать время переключения.
4.2.Установить переключатель «Параметры» УВИ в положение «Контр» и записывать значения углов крена, тангажа, гироскопиче-
ского курса, истинного курса и путевых скоростей Vx, Vy каждые 2 мин в течение 40 мин в таблицу. Пользоваться методикой, изложенной в приложении 2.
Результаты испытаний
t |
γ |
θ |
Ψг |
Ψик |
Vx |
Vy |
0 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
… |
|
|
|
|
|
|
40 |
|
|
|
|
|
|
По окончании испытаний выключить систему, установив основной переключатель на ПУР-2 в положение «ОТКЛ».
СОДЕРЖАНИЕ ОТЧЕТА
1.Назначение системы.
2.Блок-схема алгоритма навигации.
19
3.Циклограммы выставки по ЗК и методом ОГК.
4.Графики изменения углов и ошибок путевой скорости в режиме «Навигация» после ЗК и ОГК.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Какие навигационные параметры определяются в системе И-21?
2.Каким образом реализуется в системе И-21 режим интегральной коррекции?
3.В чем отличие выставки по ЗК и выставки методом ОГК?
4.Почему наблюдаются отличия в точностных характеристиках во время навигации после выставки по ЗК и методом ОГК?
20