

Типовые_задачи
.doc-
Водитель автомобиля является частью системы управления, которая должна обеспечивать заданную скорость движения. Изобразите соответствующую данному случаю функциональную схему замкнутой системы управления.
-
Опыт эксплуатации внедорожных автомобилей показывает, что при движении по пересеченной местности они подвергаются действию многих возмущений. В этом случае может быть применена система активной подвески, управляемая с помощью датчика, который предвидит изменение дорожной обстановки. Пример такой простой системы, смягчающей влияние неровностей, приведен на рисунке. Определите значение коэффициента
 ,
при котором автомобиль не подпрыгивал
бы при действии возмущения
,
при котором автомобиль не подпрыгивал
бы при действии возмущения
 и
при желаемом отклонении
и
при желаемом отклонении


-
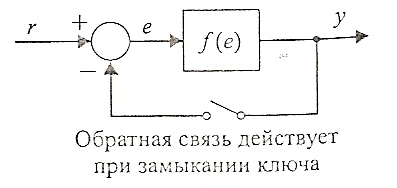
В системе с единичной обратной связью, изображенной на рисунке, нелинейный элемент описывается зависимостью
 .
При задании входного сигнала в диапазоне
от 0 до 4 постройте график зависимости
.
При задании входного сигнала в диапазоне
от 0 до 4 постройте график зависимости
 как
для разомкнутой, так и для замкнутой
системы.
как
для разомкнутой, так и для замкнутой
системы.
-
Сопротивление термистора
 описывается
зависимостью:
описывается
зависимостью:
![]() ,
где
,
где
![]() кОм,
а
кОм,
а
![]() —
температура в градусах Цельсия. Получите
линейную модель термистора для случая
малых отклонений температуры от
номинального значения
—
температура в градусах Цельсия. Получите
линейную модель термистора для случая
малых отклонений температуры от
номинального значения
![]() ºС.
ºС.
-
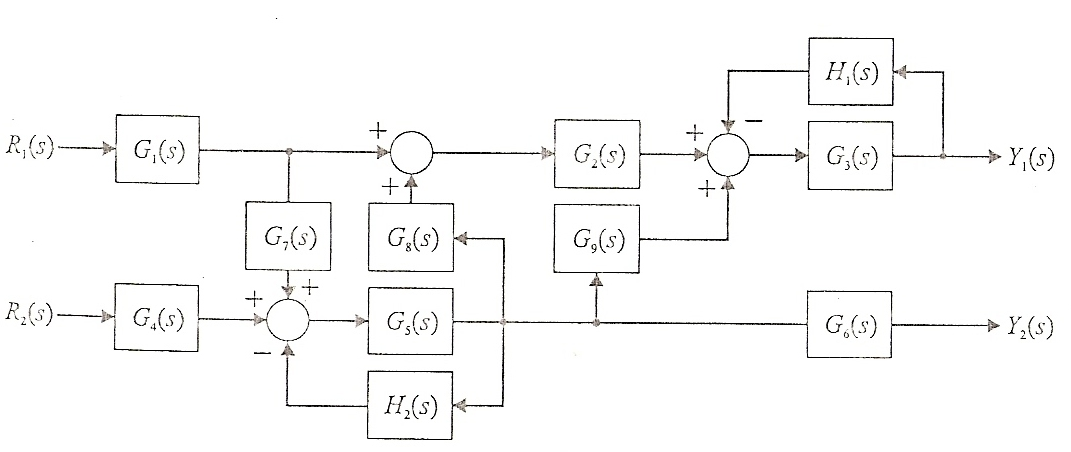
Определите передаточную функцию
 для
многомерной системы.
для
многомерной системы.
-
Передаточная функция системы имеет вид:
![]()
Определите
![]() ,
если
,
если
![]() имеет
вид единичной ступенчатой функции.
имеет
вид единичной ступенчатой функции.
-
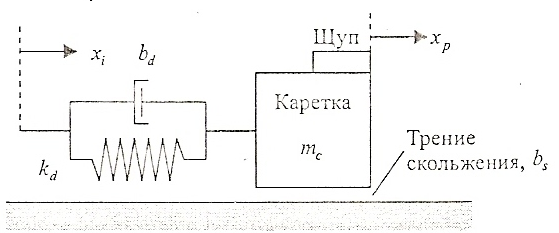
На рисунке изображена скользящая каретка, обеспечивающая прецизионное позиционирование щупа. Определите передаточную функцию
 ,
если коэффициент трения приводного
вала
,
если коэффициент трения приводного
вала
 ,
коэффициент упругости приводного вала
,
коэффициент упругости приводного вала
 ,
,
 и коэффициент трения скольжения
и коэффициент трения скольжения

-
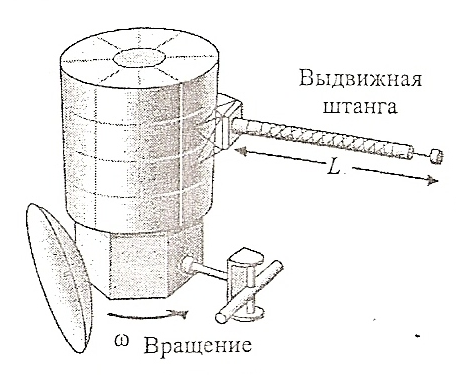
Угловая скорость вращения спутника
 ,
изображенного на рисунке, зависит от
длины штанги
,
изображенного на рисунке, зависит от
длины штанги
 .
Передаточная функция, связывающая
.
Передаточная функция, связывающая
 и
приращение длины штанги
и
приращение длины штанги
 ,
имеет вид:
,
имеет вид:
![]()
Изменение длины штанги происходит в
соответствии с выражением
![]() .
Определите закон изменения скорости
.
Определите закон изменения скорости
![]() .
.
-
В устройствах электропитания от солнечных батарей используются системы с обратной связью, которые следят за положением Солнца с целью получения максимума отдачи мощности от солнечных батарей.
![]()
причем номинальное значение
![]() с.
с.
-
Определить чувствительность системы к малым изменениям
 и
построить график зависимости
чувствительности от частоты.
и
построить график зависимости
чувствительности от частоты. -
Определить постоянную времени замкнутой системы.
-
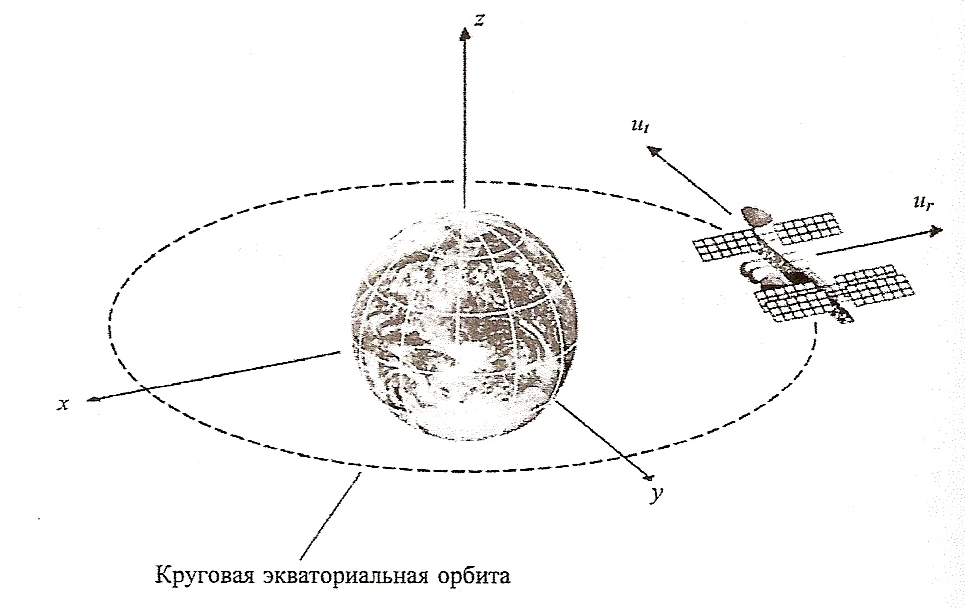
Спутник находится на экваториальной круговой орбите на высоте 450 км над поверхностью Земли. Движение спутника (в плоскости орбиты) описывается нормированными уравнениями состояния:
 ,
,
где вектор состояния
![]() соответствует
отклонениям от экваториальной круговой
орбиты,
соответствует
отклонениям от экваториальной круговой
орбиты,
![]() и
и
![]() —
выходные сигналы, характеризующие тягу
двигателей в радиальном и тангенциальном
направлениях, а
—
выходные сигналы, характеризующие тягу
двигателей в радиальном и тангенциальном
направлениях, а
![]() рад/c
(приблизительно один оборот за 90 минут)
— орбитальная угловая скорость на
заданной высоте. При отсутствии возмущений
спутник все время остается на заданной
круговой экваториальной орбите. Однако
возмущения в виде аэродинамического
торможения будут стремиться отклонить
спутник от номинальной траектории.
Исследовать управляемость спутника в
зависимости от наличия управляющих
сигналов
рад/c
(приблизительно один оборот за 90 минут)
— орбитальная угловая скорость на
заданной высоте. При отсутствии возмущений
спутник все время остается на заданной
круговой экваториальной орбите. Однако
возмущения в виде аэродинамического
торможения будут стремиться отклонить
спутник от номинальной траектории.
Исследовать управляемость спутника в
зависимости от наличия управляющих
сигналов
![]() и
и
![]() .
.
-
Исследовать управляемость системы
![]()
-
Исследовать управляемость системы в зависимости от параметра
 :
:
![]()
![]()
-
Исследовать наблюдаемость системы:
![]()
-
Исследовать наблюдаемость системы:
![]()