Исследование малогабаритной БИНС низкой точности для беспилотной машины специального назначения
Введение
Объектом исследования настоящей статьи является малогабаритная бесплатформенная инерциальная навигационная система (БИНС) низкой стоимости. Такие БИНС устанавливаются на динамические объекты с ограниченным жизненным циклом: малые беспилотные летательные аппараты и беспилотные машины (БМ), часто одноразового действия. Такие динамические объекты используются для исследования поверхности в условиях химического и радиационного заражения местности, при разминировании, в качестве вспомогательных средств при пожаротушении, природных катаклизмах, в условиях техногенных катастроф. Управление БМ осуществляется на основе информации от БИНС.
ИНС подразделяются на классы:
Высокий – приведенный дрейф составляет 0,016 град/час; средний – приведенный дрейф составляет 0,05 гр/час; низкий – 0,4 гр/час.
Существуют также малогабаритные системы с низкой стоимостью, построенные на микромеханике, имеющие приведенный дрейф 15-100 гр./час.
МЭМС-технологии позолили существенно снизить стоимость БИНС. Поэтому при проектировании БМ ограниченного срока жизни обычно выбирают дешевые низкоточные БИНС, построенные на МЭМС-элементах. Однако из-за нестабильности МЭМС-элементов точность БИНС может изменяться в широком диапазоне. Следствием этого является необходимость устанавливать на БМ более дорогие БИНС.
Обеспечение требуемых качественных характеристик БИНС может осуществляться двумя способами: конструкторским и алгоритмическим. Конструкторский способ предполагает наличие новой технологической базы, длительного времени и серьезных финансовых затрат. Алгоритмический способ позволяет достичь требуемого результата за короткое время с минимальными финансовыми затратами. В связи с этим, современные БИНС отличаются большим объемом алгоритмического обеспечения. Использование алгоритмического способа, естественно, не ограничивает реализацию новых конструктивных решений.
Измерительные сигналы БИНС имеют погрешности, обусловленные конструктивными особенностями и условиями функционирования БМ. Повышение точности измерительной информации предполагает исследование причин возникновения погрешностей и последующую их компенсацию алгоритмическим путем.
В статье исследованы погрешности низкоточной БИНС и представлен метод повышения точности с помощью алгоритма оценивания. С помощью СНС и алгоритмов коррекции удается с помощью низкоточной БИНС получать навигационную информацию более высокого класса точности.
Бесплатформенные инерциальные навигационные системы.
БИНС для получения навигационной информации относительно выбранной системы координат моделируют математический маятник с периодом Шуллера посредством информации о линейных ускорениях и угловых скоростях несущего объекта. БИНС могут включать акселерометры, которые жестко крепятся на борту БМ, либо перемещаются по заданному закону, или акселерометры и измерители, и измерители угловых скоростей.
Достоинствами БИНС по сравнению с платформенными ИНС обычно считаются большая надёжность, простота эксплуатации и меньшая стоимость. Хотя требования к точностным характеристикам акселерометров и гироскопов более высокие, так как чувствительные элементы БИНС жёстко закреплены непосредственно на корпусе, БМ находятся в чрезвычайно жёстких условиях эксплуатации.
Используются различные схемы построения БИНС с помощью акселерометров и гироскопов. Наибольший интерес представляют схемы, построенные на 6 акселерометрах или на 3 акселерометрах и двух трехстепенных гироскопах.
Для построения БИНС, чтобы ошибки быстро не возрастали, должны использоваться прецизионные акселерометры и гироскопы, а также требуется наличие на борту вычислительной машины с большой скоростью счета для проведения значительного объема вычислений.
Создание принципиально новых типов гироскопов и широкое внедрение БЦВМ повышенной производительности открыли большие возможности для проектирования надежных и экономичных ИНС, чувствительные элементы которых устанавливаются непосредственно на корпусе БМ.
В практических приложениях используются для построения БИНС различные типы гироскопов, такие как лазерные, волоконно-оптические, с электростатическим подвесом, пьезоэлектрические, вибрационно-резонансные и другие гироскопы. Появление МЭМС-технологий позволило существенно снизить стоимость БИНС. Но точность БИНС на МЭМС-элементах также существенно снизилась.
БИНС имеют методические и инструментальные погрешности. Основным недостатком БИНС является нарастание этих погрешностей с течением времени. Для повышения точности БИНС обычно используются какие-либо датчики внешней навигационной информации. Коррекция БИНС БМ часто осуществляется с помощью системы GPS. Однако сигналы GPS также содержат ошибки, обусловленные слабой помехозащищенностью канала передачи информации. Поэтому сигналы БИНС и GPS обычно подвергают совместной обработке в БЦВМ. Сравнение сигналов БИНС и GPS позволяет выделить смесь ошибок этих систем. Сигнал, пропорциональный этим ошибкам, используется в качестве входного сигнала алгоритма оценивания. С помощью алгоритма оценивания осуществляется вычисление ошибок БИНС, а ошибки GPS отфильтровываются. Выделить из смеси ошибок сигнал, пропорциональный ошибкам БИНС удается на том основании, что сигналы GPS и БИНС имеют различную физическую природу. Сигнал БИНС имеет низкочастотный характер, а сигнал GPS содержит явно выраженную высокочастотную составляющую. В алгоритме оценивания ошибки GPS принимаются за измерительный шум и подавляются. С выхода алгоритма оценивания сигнал, пропорциональный ошибке БИНС поступает в выходной сигнал БИНС, где алгебраически вычитается из информационного сигнала, пропорционального местоположению и скорости БМ. Таким образом, осуществляется коррекция навигационной информации, получаемой с помощью БИНС.
Главным преимуществом автономных ИНС является их инвариантность к горизонтальным ускорениям. Однако погрешности автономных ИНС, обусловленные дрейфом гироскопов, смещением нуля и дрейфом акселерометров, а также другими возмущающими факторами, достигают значительных величин.
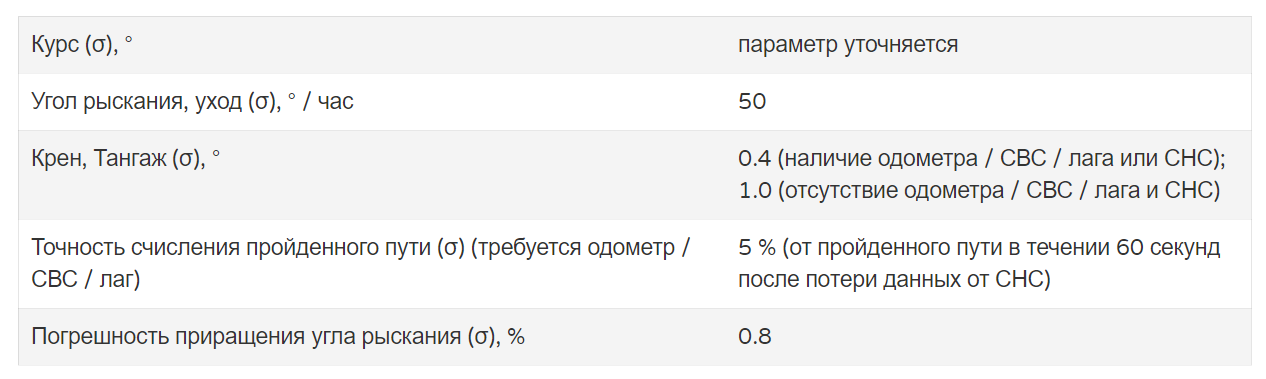
Исследуемая БИНС ГЛ ВГ 109 представлена на рис.1.

Рис.1
ГЛ ВГ 109 имеет следующие заявленные характеристики представленные на рис. 1