

12601191_Sistemypodcinen
.docxСистемы подчиненного регулирования
Структура трехконтурной системы подчиненного регулирование приведена на рис.1

Рис. 1 Структура системы подчиненного регулирования
Особенностью системы подчиненного регулирования является наличие вложенных (подчиненных) контуров регулирования. Задающий сигнал от внутреннего контура поступает от регулятора внешнего контура. Соответственно ограничение выхода регулятора внешнего контура является ограничением задания для внутреннего контура и обеспечивает ограничение внутренней координаты объекта управления. Простота ограничения внутренних координат объекта управления является существенное преимущество подчиненного регулирования. Вторым преимуществом является простота синтеза регуляторов. Так как каждый регулятор включен в контур с одной компенсируемой (существенной) постоянной времени объекта управления, что упрощается структура и синтез регулятора.
Синтез регуляторов в системе подчиненного регулирования рассмотрим на примере двухконтурной системы, структура которой приведена на рис.2.

Рис. 2 Структура двухконтурной системы подчиненного регулирования
Синтез регулятора начинаем с внутреннего контура. Контур содержит одну существенную постоянную времени ТОУ1, которую необходимо скомпенсировать регулятором и малую эквивалентную постоянную времени T. В системе малые постоянные времени обусловлены необходимостью фильтрации сигнала и не должны компенсироваться регулятором, а также возможно малые постоянные или чистые запаздывания параметры которых сильно меняются и точно не известны. В таком случае все эти моменты учитываются эквивалентной постоянной времени T, учитывающей наихудшее соотношение плохо учитываемых задержек по времени.
Для компенсации существенной постоянной времени объекта и устранения статической ошибки выбираем ПИ-регулятор с передаточной функцией:
 . (1)
. (1)
Если выполняется условие ТР1 = ТОУ1, то передаточная функция разомкнутого внутреннего контура равна:
 . (2)
. (2)
Синтез
по критерию «технический оптимум»
состоит в том, что частота среза CP
(частота на которой модуль АЧХ равен
единице) в два раза меньше частоты точки
перегиба эквивалентной постоянной
времени Tравной
 .
Пренебрегая малой постоянной Tиз
уравнения (2) определим коэффициент
регулятора внутреннего контура:
.
Пренебрегая малой постоянной Tиз
уравнения (2) определим коэффициент
регулятора внутреннего контура:
 ,
отсюда
,
отсюда
 . (3)
. (3)
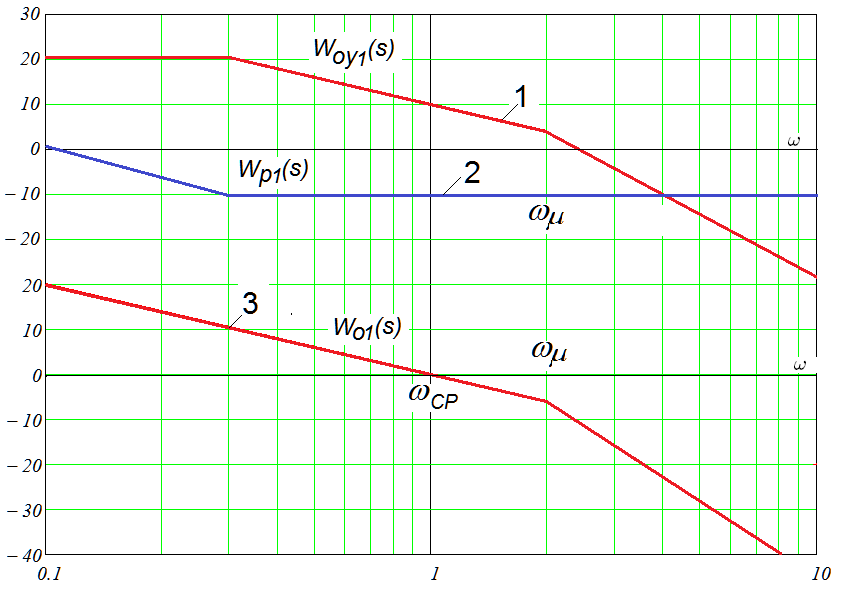
Рис.3 Асимптотические ЛАЧХ внутреннего контура: 1 – объекта управления; 2 – регулятора; 3 – разомкнутого контура. Параметры системы:
ТОУ1 = 3.33с, Т = 0.5 c, КОУ1 = 10с, КР1 = 0.1.
Передаточная функция разомкнутого внутреннего контура равна:
 . (4)
. (4)
Передаточной функции разомкнутого контура (4) соответствует передаточная функция замкнутого внутреннего контура:
 .
(5)
.
(5)
ЛАЧХ и ЛФЧХ замкнутого контура приведена в рис.4, а переходная характеристика в рис.5.

Рис.4. 1 – ЛАЧХ, 2 – ЛФЧХ замкнутого контура
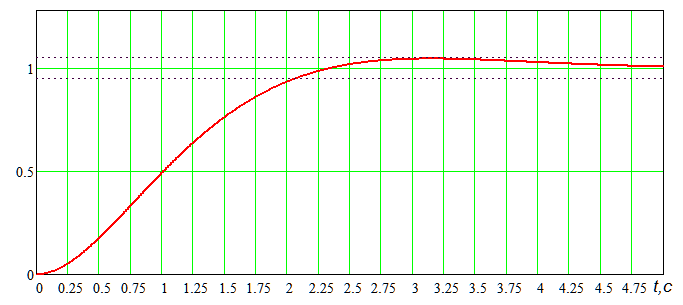
Рис.5 Переходная характеристика внутреннего замкнутого контура
Перерегулирование переходной характеристики составляет 4.3%, то есть переходный процесс считается законченным (входит в зону 5%) при первом достижении зоны установившегося процесса.
Анализ ЛАЧХ и ЛФЧХ показывает, что замкнутый контур при анализе следующего контура приближенно можно оценить как апериодическое звено с передаточной функцией:
 . (6)
. (6)
Синтез внешнего контура.
Методика синтеза внешнего контура аналогична синтезу внутреннего контура. Если выполняется условие ТР2 = ТОУ2, то передаточная функция разомкнутого внешнего контура равна:
 . (7)
. (7)
Передаточная функция регулятора внешнего контура:
 . (8)
. (8)