

Министерство образования и науки Российской Федерации
Дальневосточный федеральный университет
Инженерная школа
В.К. Усольцев
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ
Для студентов специальности 26.03.02
Кораблестроение, океанотехника и системотехника объектов морской инфраструктуры
Методические указания к практическим занятиям
Учебное электронное издание

Владивосток
Дальневосточный федеральный университет
2021
Задание 1. Синтез системы возбуждения генератора
Структура системы возбуждения генератора приведена на рис.1.
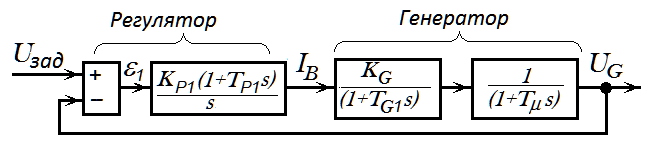
Рис.1 Упрощенная структура системы возбуждения генератора
Варианты задания:
Таблица 1
Зависимость напряжения генератора от тока возбуждения
Вариант 1 |
Вариант 2 |
Вариант 3 |
Вариант 4 |
Вариант 5 |
|||||||||
IB, A |
UG, B |
IB, A |
UG, B |
IB, A |
UG, B |
IB, A |
UG, B |
IB, A |
UG, B |
||||
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||||
0.5 |
30.4 |
0.417 |
53.7 |
0.714 |
93.5 |
0.083 |
11.2 |
1.25 |
8.41 |
||||
1.0 |
56.7 |
0.833 |
100 |
1.43 |
174 |
0.167 |
20.9 |
2.50 |
15.7 |
||||
1.5 |
79.3 |
1.250 |
140 |
2.14 |
244 |
0.250 |
29.3 |
3.75 |
21.9 |
||||
2 |
98.5 |
1.667 |
174 |
2.86 |
302 |
0.333 |
36.4 |
5.00 |
27.3 |
||||
3 |
127 |
2.500 |
225 |
4.29 |
392 |
0.500 |
47.1 |
7.50 |
35.3 |
||||
4 |
146 |
3.333 |
258 |
5.71 |
450 |
0.667 |
54.0 |
10.0 |
40.5 |
||||
5 |
157 |
4.167 |
277 |
7.14 |
483 |
0.833 |
58.0 |
12.5 |
43.5 |
||||
6 |
162 |
5.000 |
287 |
8.57 |
499 |
1.000 |
59.9 |
15.0 |
44.9 |
||||
7 |
164 |
5.833 |
290 |
10.0 |
504 |
1.167 |
60.6 |
17.5 |
45.4 |
||||
8 |
166 |
6.667 |
292 |
11.42 |
507 |
1.333 |
60.9 |
20 |
45.7 |
||||
Таблица 1 (продолжение)
Зависимость напряжения генератора от тока возбуждения
Вариант 6 |
Вариант 7 |
Вариант 8 |
Вариант 9 |
Вариант 10 |
|||||||||
IB, A |
UG, B |
IB, A |
UG, B |
IB, A |
UG, B |
IB, A |
UG, B |
IB, A |
UG, B |
||||
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||||
0.333 |
140 |
0.25 |
187 |
0.20 |
233 |
0.167 |
701 |
0.143 |
1400 |
||||
0.667 |
261 |
0.50 |
349 |
0.40 |
436 |
0.333 |
1309 |
0.286 |
2318 |
||||
1.000 |
366 |
0.75 |
488 |
0.60 |
610 |
0.500 |
1830 |
0.429 |
3661 |
||||
1.333 |
454 |
1.00 |
605 |
0.80 |
757 |
0.667 |
2272 |
0.571 |
4544 |
||||
2.000 |
589 |
1.50 |
784 |
1.20 |
981 |
1.000 |
2943 |
0.857 |
5886 |
||||
2.667 |
675 |
2.00 |
900 |
1.60 |
1125 |
1.333 |
3376 |
1.143 |
6752 |
||||
3.333 |
725 |
2.50 |
967 |
2.00 |
1208 |
1.667 |
3625 |
1.429 |
7250 |
||||
4.000 |
748 |
3.00 |
998 |
2.40 |
1248 |
2.000 |
3744 |
1.714 |
7488 |
||||
4.667 |
757 |
3.50 |
1010 |
2.80 |
1262 |
2.333 |
3787 |
2.000 |
7574 |
||||
5.333 |
761 |
4.00 |
1015 |
3.20 |
1270 |
2.667 |
3808 |
2.286 |
7616 |
||||
Таблица 2
Параметры генератора
|
Вар.1 |
Вар.2 |
Вар.3 |
Вар.4 |
Вар.5 |
Вар.6 |
Вар.7 |
Вар.8 |
Вар.9 |
Вар.10 |
UH, B |
130 |
230 |
400 |
48 |
36 |
600 |
800 |
1000 |
3000 |
6000 |
IBH, A |
3.102 |
2.585 |
4.431 |
0.517 |
7.754 |
2.068 |
1.551 |
1.241 |
1.034 |
0.886 |
TG1, c |
1.2 |
0.8 |
2.5 |
2.2 |
1.8 |
1.5 |
2.3 |
2.5 |
0.7 |
1.1 |
T, c |
0.2 |
0.15 |
0.3 |
0.4 |
0.18 |
0.15 |
0.17 |
0.2 |
0.1 |
0.1 |
Порядок выполнения задания
По экспериментальной зависимости UG=f(IB) получить аналитическую степенную зависимость UG=f(IB).
По аналитической зависимости UG=f(IB), определить дифференциальные коэффициенты передачи генератора KG для номинального и половинного напряжений.
Выполнить аналитический синтез ПИ-регулятора напряжения методом «технического оптимума» при стабилизации номинального напряжения.
Построить переходную характеристику для приращений при единичном входном воздействии.
При коэффициенте KG, соответствующему половинному напряжению генератора, построить логарифмические амплитудную ЛАЧХ и фазовую ЛФЧХ частотные характеристики на одном графике.
Подобрать, меняя показатель колебательности М, -кривую (зависимость запаса по фазе).
Определить по показателю колебательности ожидаемое перерегулирование.
Построить переходную характеристику замкнутой системы.
Сделать выводы о влиянии рабочей точки на качество регулирования.
Примечание: В качестве методических указаний использовать файл «Рекомендации по Mathcad.xmcd.
Задание 2. Синтез системы управления электродвигателем
2.1. Описание объекта
Динамика электродвигателя постоянного тока напряжение якоря – угол поворота вала двигателя описывается следующим дифференциальным уравнением [1] формула (12).

где:
 ,
,
 ;
;
 – конструктивные коэффициенты;
– конструктивные коэффициенты;
 – угол поворота электродвигателя;
– угол поворота электродвигателя;
u – напряжение якоря электродвигателя;
J – момент инерции электродвигателя;
R – активное сопротивление якоря электродвигателя;
МН – момент нагрузки.
Для получения передаточной функции
операцию дифференцирования заменяем
оператором преобразования Лапласа:

После преобразования получим передаточную по управлению:
Передаточная функция по возмущению имеет похожий вид:

где:
 ,
,
 ,
,
 .
.
В данном случае нельзя применить ПИ-регулятор, так как обеспечить устойчивость системы с астатизмом второго прядка не удается. Применим регулятор с передаточной функцией вида:
Постоянная времени регулятора ТР
компенсирует постоянную времени
электродвигателя
 .
Малая постоянная
.
Малая постоянная
 необходима для физической реализации
регулятора и она обычно равна (0.1 –
0.2)ТР. Результирующая
передаточная функция разомкнутого
контура по управлению:
необходима для физической реализации
регулятора и она обычно равна (0.1 –
0.2)ТР. Результирующая
передаточная функция разомкнутого
контура по управлению:

Структура системы управления положением электродвигателя приведена на рис.2.

Рис.2 Структура системы управления положением электродвигателя
Передаточная функция замкнутой системы по управлению

Передаточная функция замкнутого контура по возмущению
