

Симонов Томографические измерителные информационные системы 2011
.pdfтановки для получения данных, необходимых для рентгеновской томографии.
а |
б |
Рис. 1.26. ПЭТ-томограф (а), одновременно снимаются 240 проекций. Определяется распределение изотопа, излучающего позитроны, по вторичному гамма-излучению (б)
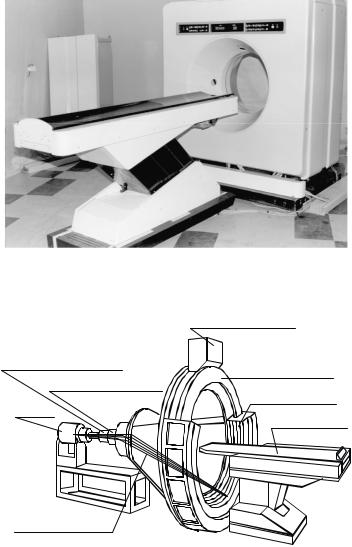
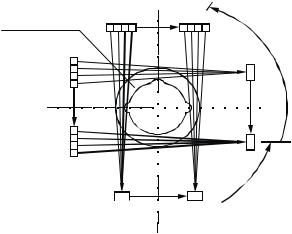
Рис. 1.27. Эскиз типичного сканера для реконструктивной рентгеновской томографии
41
Рентгеновская трубка содержит один источник излучения, а приемная система содержит множество детекторов (сотни) рентгеновского излучения. Пусть рентгеновская трубка и коллиматор расположены по одну сторону от пациента, а детекторная система
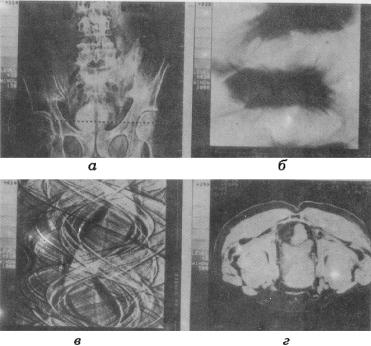
– по другую и обе они неподвижны. Пациент помещен на ложемент стола, который перемещается с постоянной скоростью. Облучая пациента веерным пучком рентгеновского излучения через равные интервалы времени и детектируя рентгеновское излучение на другой стороне, можно построить двумерную рентгеновскую проекцию некоторой области тела пациента, которая весьма сходна с изображением на обычной рентгеновской пленке. Подобная проекция представлена на рис. 1.28, а.
Рис. 1.28. Рентгенограмма (а) (штриховой линией указано положение томографической плоскости), синограмма проекционных данных (б), синограмма данных свертки (в) и реконструктивная томограмма (г)
42
Точечная яркость является показателем полного поглощения рентгеновского излучения на пути от источника к детектору. Такой способ получения изображения не является реконструктивной томографией, а лишь одной из альтернатив метода получения изображения с помощью рентгеновского излучения.
В реконструктивной томографии пациент неподвижен, а рентгеновская трубка и детекторная система вращаются вокруг пациента. Веерный пучок излучения от источника к детектору определяет плоскость сечения тела пациента. На рис. 1.28, а местонахождение этой плоскости показано штриховой линией.
Экспериментальные данные отсчитывают в моменты времени, когда источник и детекторы занимают последовательно ряд фиксированных положений, называемых ракурсами. Для каждого ракурса измерения отсчитывают всеми детекторами. Показания всех детекторов для всех ракурсов представляют собой синограмму (рис. 1.28, б). Интенсивности синограмм пропорциональны линейным интегралам распределения линейного коэффициента поглощения рентгеновского излучения между источником и соответствующим детектором.
По этим линейным интегралам при помощи алгоритма реконструкции можно получить двумерное изображение распределения линейного коэффициента поглощения излучения в том слое тела пациента, какое изображение представлено на рис. 1.28, г.
Поскольку коэффициенты поглощения излучения у разных тканей различны, имеется возможность очертить границы органов и отличить здоровую ткань от опухолей. Так, при помощи реконструктивной томографии получают информацию о слоях поперечных сечений человеческого тела без хирургического вмешательства. Снимок на рис. 1.28, в является синограммой «свернутых» проекционных данных (смысл которых будет объяснен в гл. 2 и 3).
На рис. 1.29 показан первый отечественный медицинский рентгеновский компьютерный томограф для всего тела человека РКТ–01.
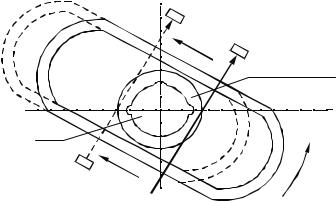
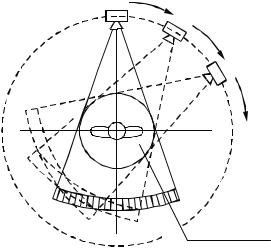
Весьма перспективной является схема динамического проекционного регистратора (динамического рентгеновского компьютерного томографа) (рис. 1.30). Его особенностью является то, что достаточно мощный электронный луч сканируется в течение порядка 50 мс
43
специальной магнитной системой по периметру большой мишени, охватывающей тело пациента. Электронный луч формирует рентгеновское излучение, которое попадает на детекторную систему.
Рис. 1.29. Снимок рентгеновского компьютерного томографа для всего тела человека РКТ–01
|
Электронная система |
|
Фокусирующая катушка |
Кольцо детекторов |
|
Отклоняющая катушка |
||
Кольцо мишени |
||
Пушка |
||
Стол пациента |
||
|
Электронный пуск
Рис. 1.30. Схема динамического рентгеновского томографа для исследования коронарных сосудов сердца
44
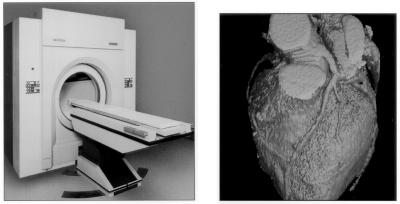
На рис. 1.31 показана фотография динамического рентгеновского томографа фирмы «Иматрон»(США).
а |
б |
Рис. 1.31. Динамический рентгеновский томограф фирмы «Иматрон» (а)
иобъемная томограмма сердца (б)
1.5.Анализ технических характеристик рентгеновских компьютерных томографов
Современная рентгеновская компьютерная томография ориентирована на получение изображения любого поперечного сечения тела человека с дифференциацией мягких тканей по плотности. Эффективность применения рентгеновских компьютерных томографов предопределяется большим количеством факторов, как экономического, так и технического характера. К ним относятся в первую очередь стоимость и возможность серийного выпуска компьютерных томографов для оснащения широкого круга клинических учреждений.
Важной является так же доза облучения, которую получает пациент при обследовании и от которой зависит возможное количество срезов, производимых при одном обследовании.
Не менее важным представляется такой параметр, как время сканирования. Важность этого параметра особенно проявляется в тех случаях, когда осуществляется обследование органов тела че-
45
ловека, движение которых связано с дыханием, не говоря уже об исследовании миокарда сердца.
Взаимосвязанный учет перечисленных параметров приводит к разнообразным техническим реализациям, отличающимся, как типами источников излучения, конструкцией механической части и систем автоматики и управления, так и системой детекторов излучения. Можно отметить, что при построении компьютерных томографов различных типов в одних случаях ужесточаются требования к приводу системы управления сканирующей частью томографа, в других случаях более жесткие требования предъявляются к механике сканирующей части. Аналогично можно сказать и в отношении системы детекторов излучения и электроники предварительной обработки данных.
Указанные выше варианты построения структур компьютерных томографов тесно связаны с принципами математической обработки данных при восстановлении изображения по проекциям. Так, в случае систем, использующих малое число детекторов и поступа- тельно-вращательный вид движения механической части, излучателем и коллиматором формируется параллельный пучок рентгеновских лучей; этим и предопределяется алгоритм восстановления изображения. В системах с большим количеством детекторов стремятся создать с помощью коллиматоров отличающийся от параллельного пучка луч с веерной геометрией, что не только изменяет конструкцию механической части, но и существенно влияет на сложность алгоритма восстановления. В этом случае алгоритм становится более сложным и требует значительно большей производительности вычислительной системы для получения изображения в реальном масштабе времени.
Таким образом, целесообразно рассмотреть отдельно некоторые из наиболее употребляемых структур компьютерных томографов и показать на их примерах пути их развития.
Система компьютерной томографии может быть построена с использованием одного детектора и одного источника излучения, как показано на рис. 1.32.
Для получения томографического излучения необходимо осуществить два вида движения. Первое из них поступательное, т.е.
46
ИРИ и Д осуществляют синхронное передвижение вдоль ИО. Далее производится вращательное движение системы ИРИ и Д на некоторый элементарный угол, величина которого задается при выборе технических характеристик, что связано с точностью восстановления изображения.
ИРК
Область
реконструкции
ИО
на угол Θ

 Д
Д
Рис. 1.32. Схема рентгеновского компьютерного томографа первого поколения (ИРИ – источник рентгеновского излучения, Д – детектор, ИО – исследуемый объект. Пунктирной линией показано направление движения ИРИ и Д)
После фиксации системы ИРИ и Д в новом угловом положении вновь производится поступательное движение механически жестко связанных ИРИ и Д в направлении, противоположном поступательному движению в предыдущем угловом положении.
Рассмотренная схема достаточно проста и может быть отнесена к медленно действующим, что, в свою очередь, предопределяет наиболее подходящую область применения таких систем – исследования головы. Исторически так и сложилось, что подобные схемы были созданы и ориентированы на применение в нейрофизиологии и нейрохирургии. Отличительная особенность такой схемы заключается в том, что использование одного детектора исключает трудности с подбором группы одинаковых детекторов, с необходимостью разработки многоканальной электронной системы сбора данных и значительных трудностей, связанных с калибровкой. Од-
47
нако быстрое получение изображения при такой схеме затруднено, что сужает область ее применения. Время одного сканирования ИО занимает порядка 15–20 минут.
Естественным развитием рассмотренной выше схемы является схема, содержащая группу детекторов и сохраняющая общие принципы построения механической части системы и принципы восстановления изображения (рис. 1.33).
Д
Область реконструкции
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.33. Схема |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОИ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рентгеновского |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
компьютерного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
томографа второго |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
поколения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ИРИ
 на угол Θ
на угол Θ
В этой схеме начинают появляться сложности, связанные с приемом и предварительной обработкой данных, которые состоят в необходимости тщательного подбора группы идентичных детекторов и построения сложной параллельной схемы тракта усиления каналов и ввода соответствующих масштабных коэффициентов. Однако такая схема обеспечивает возможность получения высокой пространственной разрешающей способности при приемлемом времени сбора данных и восстановления изображения. Время сканирования занимает 5–10 мин.
Дальнейшее развитие томографических систем было связано с необходимостью существенного уменьшения времени получения томограммы и улучшения качества сканирования всего тела человека. Построение такого рода схем потребовало пересмотра принципов работы и функционирования механической части, способов обработки информации и т.д. Естественно, что для уменьшения времени сканирования представлялось целесообразным исключить
48
два вида движения сканирующего устройства, поступательное и вращательное, и заменить их только вращательным движением
(рис. 1.34).
ИРИ
 ОИ
ОИ
 Область реконструкции
Область реконструкции
Рис. 1.34. Схема рентгеновского компьютерного томографа третьего поколения
Так же, как и в предыдущих схемах, имеем один источник рентгеновского излучения, отличие – линейка со множеством детекторов (обычно от 300 до 5000), воспринимающая рентгеновское излучение веерной формы.
Развал луча обеспечивает полный охват объекта исследования и линейки детекторов. Движение осуществляется таким образом, что ИРИ и Д находятся в каждый момент времени в противоположных частях сканирующего устройства по отношению к объекту исследования. Вращательное движение осуществляется непрерывно, что является основой получения малого времени сканирования (от 12 сек до 1 с).
Однако при такой схеме сканирования, обладающей существенным преимуществом в получении малого времени сканирования, имеется целый ряд трудностей. Первая из них состоит в необходимости создания высокоточной механической конструкции, обеспе-
49
чивающей минимально возможные биения на оси подшипника, которая является мнимым центром вращения. Вторая трудность – необходимость формирования веерного рентгеновского пучка с высокими показателями по равномерности во всех точках линейки детекторов, несмотря на значительное расстояние от фокальной точки излучения. Третья трудность – в создании высокостабильной линейки идентичных детекторов, обладающих высокой квантовой эффективностью по отношению к приему рентгеновского излучения.
Четвертая проблема, связанная с третьей, состоит в разработке электронных схем предварительной обработки данных. Они должны быть построены таким образом, чтобы в параллельных каналах, количество которых равно количеству единичных детекторов в линейке, содержалась аппаратура предварительного усиления и ана- лого-цифрового преобразования для передачи сформированного цифрового кода в вычислительную систему для последующей обработки и реконструкции изображения.
Важно отметить пятую проблему построения томографических систем по этой схеме. Она состоит в том, что вычислительные средства, на которые возлагается обработка информации и реконструкция изображения, должны обладать высокой производительностью и в реальном масштабе времени обсчитывать матрицу значительного объема (обычно матрица 512×512 20 разрядных слов) с вычислением сложных преобразований и функций.
Исследования показывают, что улучшение основных параметров томографической системы может быть достигнуто путем увеличения числа детекторов при одном источнике рентгеновского излучения (рис. 1.35). В этом случае детекторная система становится круговой и не располагается на вращающемся подшипнике. Электронная система сбора данных так же может быть вынесена с вращающейся части, что может рассматриваться как существенное упрощение конструкции и значительное снижение требований к массогабаритным параметрам электронных систем.
В такого рода схемах должны быть преодолены значительные трудности, связанные с построением кругового детектора, требования к которому не снижаются, а в определенной мере ужесточают-
50