

Сафоненко Практикум по интерфейсам последователной передачи 2012
.pdfСигнал TxD (Transmitted Data) активен, когда данные передаются от DTE устройства на DCE устройство.
Сигнал RxD (Received Data) активен, когда DTE устройство получает данные из DCE устройства.
Сигнал GND(общий Signal Ground) второй провод для всех сигналов. (Сигналы передаются всегда по двум проводам!)
Сигнал PG (Protective Ground) – защитное заземление.
Рис. 2. Разъем RJ-45
Таблица 2 Распайка контактов для разъема RJ-45
Контакт |
Обозначение |
1 |
RI |
2 |
DCD |
3 |
DTR |
4 |
GND |
5 |
RxD |
6 |
TxD |
7 |
CTS |
8 |
RTS |
В табл. 2 приведена рас-
пайка разъёма RJ-45. Кабель соединения DTE–DTE носит название нуль-модемного, соединения DTE–DCE называются прямыми, DCE–DCE называются кроссовыми. В пособии предполагается коммутация устройств типа DTE–DTE с помощью нульмодемного кабеля. Распайка может быть выполнена в
минимальном и полном вариантах. Минимальный вариант кабеля используется для коммутации портов без применения сигналов квитирования или для тестирования программного продукта на одном порту в режиме коммутации его выхода на вход.
Электрический стандарт
Выходное значение напряжения сигнала в контроллере интерфейса UART соответствует уровню 0..+5 В. Напряжение электрического сигнала в линии передачи имеет уровень от −15 до +15 В.
21
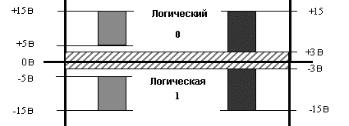
Согласование и преобразование уровней напряжения сигнала специальные микросхемы – преобразователи уровней. Сигналы формируются в инверсном коде: значению логической единицы соответствует низкий уровень напряжения электрического сигнала (−15 В в линии связи). Отсутствие данных сопровождается высоким уровнем напряжения в линии. Стандарт допускает максимальные значения уровней напряжения: +25 В для логического нуля и −25 В для логичкской единицы. В табл. 3 и на рис. 3 приведены уровни кодирования логических сигналов в линии на стороне передатчика и приемника. Следует отметить, что стандарт не предусматривает гальваническую развязку цепей оконечных устройств. Эта особенность снижает параметры надежности и помехозащищенности интерфейса. Например, коммутация оконечных устройств с раздельными линиями заземления и питания проводится при отключенном питании.
|
|
|
Таблица 3 |
Логические и потенциальные уровни напряжений |
|||
в линии приемника и передатчика |
|
||
|
|
|
|
Зоны распознавания |
Уровни напряжения, В |
||
логических уровней |
|
|
|
Передатчика |
|
Приемника |
|
|
|
||
Уровень логического «0» |
+5…+15 |
|
+3…+25 |
Зона не определена |
−5…+5 |
|
−3…+3 |
Уровень логической «1» |
−15…−5 |
|
−3…−25 |
Передатчик |
Приемник |
|
|
Рис. 3. Схема согласования потенциальных уровней сигналов в приемном и передающем устройствах
Линии GND приемника и передатчика соединяются в кабеле отдельным проводом. Коммутация этого проводника с физическим
22
заземлением, с экраном кабеля и контактом PG физического заземления существенно влияет на помехозащищенность. Помехозащищенность экранированной линии связи максимальна, если экран кабеля соединяется исключительно с линиями GND приемника и передатчика только на одной стороне там, где заземление наиболее качественное.
Стандарт RS-232/ITU-T V.28 регламентирует уровни напряжения электрических сигналов в приемнике и передатчике.
Электрические характеристики приёмника сигналов: общее сопротивление приёмника должно находиться в пределах 3000...
7000 Ом, напряжение на входе приёмника должно быть в пределах ±3...±15 В, ЭДС приёмника при разомкнутой схеме должно быть не более ±2 В, общая ёмкость цепей приёмника должна быть не более 2500 пФ, входной импеданс приёмника не должен быть индуктивным.
Электрические характеристики генератора сигналов: допускается короткое замыкание сигналов, допускается оставлять выход генератора без нагрузки, напряжение генератора при разомкнутой схеме должно быть не более ±25В/±15 В, короткое замыкание цепей генератора не должно вызывать токи величиной более 0,5 А.
Динамические характеристики сигналов: сигнал, вошедший в область перехода −3 В...+ 3В, должен выйти монотонно в противоположную область сигнал без повторного захода в область перехода. Колебания сигнала в области перехода не допускаются. Сервисные и синхронизирующие сигналы должны проходить область перехода за время не более 1мс. Сигналы данных должны проходить область перехода за время не более 3 % от времени одиночного элемента, но не более чем за 1 мс. Скорость нарастания фронта сигнала не должна превышать величины 30 В за миллисекунду.
Технические характеристики передачи
Стандарт RS-232 реализуется фирмами в виде контроллеров с общей аббревиатурой UART. Интерфейс RS-232 реализуется производителями в виде отдельных микросхем или встраивается в контроллер наряду с другими видами интерфейсов. Примером может служить микросхема MAX232, для питания которой можно использовать USB разъем или стабилизированный источник.
23
Сигналы после прохождения по кабелю искажаются. Искажения нарастают с увеличением длины кабеля. Этот эффект связан с электрической емкостью кабеля. По стандарту максимальная нагрузочная емкость передатчика должна быть не более 2500 пФ, а входное сопротивление приемника не менее 3 кОм. Типичная емкость кабеля составляет 130 пФ на метр длины, поэтому максимальная длина кабеля ограничена примерно 17 м. Стандарт устанавливал максимальную скорость передачи 20 КБод и определял следующий набор скоростей двоичных сигналов 110, 150*2S,57600*P; S = 0…8, Р = 1, 2 Бод]. Длину линии связи можно увеличить, снижая скорость передачи. Рекомендуемая скорость передачи не превышает 19,2 КБод на расстоянии до 15 м, 9.6 КБод на расстоянии 150 м, 110 Бод на расстоянии более 1000 м с применением экранированной линии связи без применения модемов. Единица [Бод] названа в честь Эмиля Бодо (Jean Maurice-Emile Baudot) (1845−1903 гг.), француз-
ского инженера по телеграфии, изобретателя первого печатающего устройства для телеграфа, представленного на Международной телеграфной конференции в 1927 г. Последние версии стандарта не оговаривают величину скорости передачи, и некоторые микросхемы UART позволяют устанавливать скорости передачи до 2 Мбит/с. Высокие скорости передачи UART позволяют компоновать интерфейсы RS-232 c USB. Некоторые приложения используют подключение UART к USB или эмуляцию схем UART с помощью популярных микросхем-преобразователей фирмы FTDI [8]. Поскольку высокие скорости доступны не всем микросхемам UART, такие варианты включения могут снизить производительность USB. Примером может служить чип, составленный из микросхем FT232R и двух последовательных преобразователей – MAX232 и MAX485. Устройство можно использовать как RS-232, RS-485, или UART TTL конвертер. Со стороны компьютера устройство определяется как COM-порт и поддерживает скорости от 110 до 921600 Бод. В устройстве имеются три разъема для подключения портов.
Для подключения портов RS-232 используются две микросхемы MAX232, которые преобразуют сигналы стандарта TTL в сигналы стандарта V.24 и наоборот.
Для подключения портов RS4-85 используется микросхема
SN75176.
24
Для подключения портов UART сигналы линий TxD и RxD в стандарте TTL выведены на штыревой разъем на плате.
Уровень протокола ВОС
Интерфейс соответствует физическому и канальному уровням сетевой модели открытых систем OSI (Open Systems Interconnection Reference Model). Для программирования интерфейса RS-232 используются практически любые языки. Подавляющее число современных языков программирования содержат библиотеки функции для работы с данным интерфейсом.
Буферизация в интерфейсе
Буфер – выделенный массив в оперативной памяти, куда поступают данные с передатчика информации (источника), а уже оттуда – в приемник. Буфер позволяет согласовать скорости работы передатчика (источника) и приемника. Например, CD-плеер при встряске вынужден восстановить нарушенную скорость вращения диска, в этом случае в устройствах без буферизации воспроизведение прерывается. В моделях с буферной памятью часть информации закачивается в буфер и при изменении скорости вращения диска запись считывается из буфера без нарушений качества воспроизведения. Буфер обмена незаменим при операции копирования файлов: в течение интервалов времени перемещения головки магнитного диска информация поступает из буфера. В современных контроллерах каналы ввода-вывода UART используют буферизацию данных с протоколом прямой очереди FIFO (First In First Out). В IBM XT UART была реализована на микросхеме i8250, которая устанавливалась на материнской плате. В табл. 4 приведена линейка микросхем с указанием размера буферного устройства.
|
|
|
Таблица 4 |
Емкость буферной памяти в микросхемах UART |
|||
|
|
|
|
Тип |
Размер |
Тип |
Размер |
микросхемы |
буфера, [байт] |
микросхемы |
Буфера, [байт] |
i8250 |
1 |
i16750 |
64 |
i16450 |
8 |
i16850 |
128 |
i16550 |
16 |
i16950 |
512 |
i16650 |
32 |
Hayes ESP |
1024 |
25
Программное обеспечение в любой момент может обратиться к приёмному буферу UART, тем самым освободив его для приёма следующих данных. При заполнении приёмного буфера UART может прервать работу процессора, сообщив ему о заполнении буфера. Заполнение приёмного буфера вызовет остановку приёма данных из сети RS-232 до его прочтения.
Алгоритмы арбитража и сигналы синхронизации передачи
Определим протокол как соглашение между двумя объектами об алгоритмах связи. Процесс передачи можно условно разбить на символы, слова, кадры и сеансы. Символ передается непрерывным набором бит (логических «0» и «1») в соответствии с принятой кодировкой. Кадр формирует законченное сообщение передатчика, состоит из набора кодовых слов, сформированных из символов. Сеанс соответствует законченному этапу обмена кадрами. Сеанс завершается без конфликтов, если потребности оконечных устройств исчерпаны. Сеанс может быть прерван по инициативе одного из устройств в соответствии с протоколом.
Рассмотрим асинхронный и синхронный виды передач. Главное отличие синхронной и асинхронной передачи состоит в том, что при синхронной передаче необходимо строго согласовывать такты сигналов источника и приемника в течение всего сеанса связи. В асинхронном канале достаточно отследить фронт начального, стартового разряда, и синхронно считать разряды кода одного символа. Кроме того, синхронная передача подразумевает передачу непрерывного потока данных, тогда как асинхронная передает данные пакетами. По этой причине наиболее часто используют асинхронную передачу.
Как правило, скорости работы приемника и передатчика синхронизованы. По этой причине последовательность бит в коде символа распознается в приемнике однозначно. Примером могут служить бит-ориентированные (иногда называют «синхронные») протоколы V.42 и MNP3. Передача осуществляется блоками – кадрами, которые состоят из непрерывного набора символов. Для обозначения границ первый и последний байты кадра заполнены символа- ми-флагами со значением 01111110b (7Eh). Паузы внутри кадра недопустимы. Паузы между кадрами заполняются потоком флагов.
26
В байт-ориентированном (иногда говорят "асинхронном") протоколе MNP2 каждый байт обладает всеми признаками самостоятельного элемента информационного потока: признаком начала – стартовым битом, признаком конца – стоповым битом, неразрывностью потока внутри элемента – байта. Паузы между байтами заполняются непрерывным потоком стоповых битов.
Уменьшение соотношения числа служебных и информационных разрядов предоставляет синхронному протоколу существенное преимущество. Действительно, если длина кадра превышает четыре байта, то исключение из каждого байта стартового и стоповых битов в обмен на два байта флагов (конечный флаг может одновременно служить начальным для следующего кадра) дает выигрыш во времени передачи кадра около 20 %. Во-вторых, служебные поля кадра могут быть меньше 8 бит. На практике протоколы V.42 и MNP3 формируют служебные поля из целого числа байт. В- третьих, реакция на сбой в служебных полях кадра в синхронном протоколе выше, чем в байт-ориентированном протоколе.
Синхронные протоколы эффективны при коррекции ошибок и сжатии данных. Возможности корректирующих протоколов реализуются с помощью алгоритмов, прописанных в модеме. Подобные алгоритмы реализованы разработчиками модемных чипов (chip, специализированная микросхема) фирмы Rockwell International для создания синхронных интерфейсов типа Rockwell Protocol Interface (RPI). Формат асинхронного протокола, напротив, прост и открыт для программиста: модем отправляет каждый байт в линию в том же формате, в каком получает. Эти отличия существенно влияют на выбор типа протокола.
Протокол RPI позволяет стандартномy асинхронномy модемy, не оснащенномy аппаратно реализованными протоколами коррекции ошибок и сжатия данных, использовать протоколы V.42/V.42bis ITU-T, а также наиболее эффективный бит-ориентированный режим протоколов MNP.
Стандарт последовательного порта поддерживает протоколы симплексной (односторонней), полудуплексной и дуплексной связи. В режиме полудуплексной связи интервалы приема и передачи информации в отдельном порту во времени не пересекаются. В режиме дуплексной связи интервалы приема и передачи информации во времени в отдельном порту могут пересекаться.
27
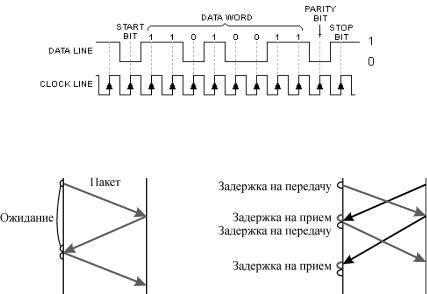
Сигналы квитирования позволяют организовать сложные сеансы связи, по характеру близкие к дуплексным протоколам связи. Фактический режим дуплексной связи в большинстве контроллеров не реализован, поскольку отсутствует параллельная процессорная обработка данных на линии приемника и передатчика порта. Структура двоичных разрядов (бит) приведена на рис. 4. В примере передается код 0xD3 в формате 1 байта данных.
Рис. 4. Диаграмма сигналов кодовой последовательности
На рис. 5 приведены диаграммы обмена сигналами в дуплексном и полудуплексном режимах.
Полудуплексный режим |
Дуплексный режим |
Рис. 5. Режимы связи
Следует отметить дуализм применения терминов «синхронный»
и«асинхронный» интерфейсы.
Впроцессе программирования портов возникает вопрос об уровне универсализации функций процессора (контроллера). Если процессор программируется строго на выполнение операций с портом, эффективен режим ввода-вывода «по готовности» устройства. Этот режим позволяет получить максимально возможную скорость в интерфейсе за счет снижения функциональной загрузки процессора (контроллера) и также называется синхронным. При расширении функций процессора применяется ввод-вывод по событиям
28
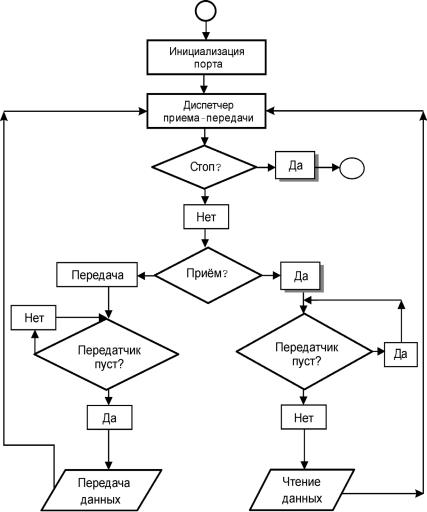
(прерываниям). Этот режим позволяет получить максимально возможную эффективность загрузки процессора за счет снижения скорости реакции на события приема-передачи и называется асинхронным. Схемы алгоритмов приведены на рис. 6 и рис. 7.
Рис. 6. Алгоритм обмена по готовности устройств
29
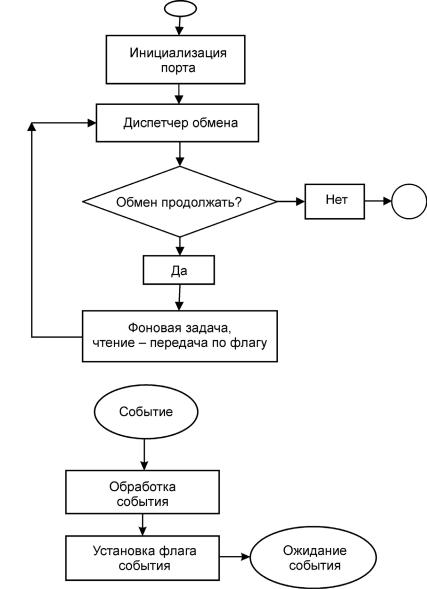
Рис. 7. Алгоритм обмена по прерываниям
30