

Плясов Лабораторный практикум по курсу обсчей физики 2011
.pdfдуля силы F, измеренной динамометром, на плечо h (расстояние от стержня до места приложения силы). Таким образом, измеренное значение момента силы определяется по формуле
N = h F . |
(1.8.11) |
Рис. 1.8.9
Необходимо записывать измеренное значение силы, не отпуская динамометр. Каждое следующее измерение проводится закручиванием стержня от его предыдущего нагруженного положения. Поскольку связь между деформацией и моментом силы является функцией времени, то измерения следует проводить через одинаковый промежуток времени.
В качестве ошибки измерения угла следует использовать погрешность отсчета шкалы торсионного прибора. Приборную ошибку значения момента – вычислять по формуле
N = N |
|
h 2 |
|
F 2 |
(1.8.12) |
|||
|
h |
|
+ |
F |
|
, |
||
|
|
|
|
|
|
|
||
где F – абсолютная погрешность измерений по динамометру; h – абсолютная погрешность измерения плеча силы.
131
Согласно формуле (1.8.6) модуль сдвига материала равен:
G = |
2kL |
, |
(1.8.13) |
|
πR4 |
||||
|
|
|
где k – угловой коэффициент графика зависимости момента силы от угла поворота стержня N(φ).
Тогда погрешность модуля сдвига рассчитывается по формуле
G = G |
|
k 2 |
|
L 2 |
+16 |
|
R 2 |
(1.8.14) |
||||
|
k |
|
+ |
L |
|
|
R |
|
, |
|||
|
|
|
|
|
|
|
|
|
|
|||
где k – абсолютная погрешность углового коэффициента.
ПРАВИЛА ТЕХНИКИ БЕЗОПАСНОСТИ
1.Торсионный прибор следует располагать в центре стола.
2.При установке стержней следует сначала вставить нижнее крепление в пазы, и только после этого закреплять верхний винт штатива.
3.При установке и замене стержней не допускать их изгиба. Перед началом измерений стержень должен быть расположен строго вертикально.
4.После завершения работы с каждым стержнем следует положить его в коробку, а не оставлять на столе.
5.Не прилагать к динамометру усилий, превышающих его предел измерений.
6.Не закручивать стержни на углы, превышающие 180 град.
ЗАДАНИЯ
Задание 1. Экспериментальное определение модуля сдвига
1. В работе используются два стержня – один из жесткого материала (алюминий, латунь или сталь) и один из мягкого (медь). Для жестких материалов петля гистерезиса очень узка, и в рамках данной лабораторной работы ее наблюдение невозможно. В этом можно убедиться, сравнив точность измерений с разностью моментов силы при прямом и обратном ходе петли. Если эти моменты совпа-
132

дают в пределах погрешности, то невозможно с уверенностью утверждать, что имеет место неоднозначная зависимость N(φ).
2.С помощью микрометра измерить диаметр выбранного стержня в 3–4 сечениях, отстоящих друг от друга приблизительно на 10 см. С помощью линейки (или рулетки) измерить длину стержня L. Вычислить среднее значение радиуса R стержня и оценить его погрешность по методу Корнфельда.
3.Установить стержень в торсионный прибор.
4.Используя крайние выступы планки 5, измерить зависимость угла закручивания стержня φ от величины приложенного момента силы N.
Для стального стержня измерения проводить от 0 до 90, от 90 до –90 и от –90 до 0 град. с интервалом в 10 град., для латунного и алюминиевого – от 0 до 180, от 180 до –180 и от –180 до 0 град. с интервалом в 20 град.
Результаты занести в заранее подготовленную табл. 1.8.1. Величины с индексом 1 соответствуют прямому ходу петли (т.е. измерениям, соответствующим последовательному увеличению угла закручивания), с индексом 2 – обратному (т.е. измерениям, соответствующим последовательному уменьшению угла закручивания).
5.Измерить плечо силы h.
|
|
|
|
|
|
Таблица 1.8.1 |
|
|
|
|
|
|
|
|
|
Материал: ………….., L =…±… см, R =…±…мм, h =…±…см |
|
|
|||||
φ, град. |
F1, Н |
F2, Н |
N1, Н·м |
N2, Н·м |
N, Н·м |
|
N, Н·м |
0 |
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
Задание 2. Наблюдение петли гистерезиса
1.Установить в торсионный прибор медный стержень.
2.Используя крайние выступы планки 5, провести измерение зависимости N(φ) в интервале от 0 до 180 град., потом, не отпуская динамометра, от 180 до –180 град., и опять, не разгружая стержень, от –180 до 0 град. Измерения проводить с шагом в 20 град. Результаты измерений занести в табл. 1.8.2.
133

Таблица 1.8.2
Материал: медь, L =…±… см, R =…±…мм, h =…±…см
φ, град |
F, Н |
N, Н·м |
0 |
0 |
0 |
20 |
|
|
40 |
|
|
… |
|
|
ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
Задание 1
1.Для каждого из углов закручивания вычислить среднее значение момента силы и оценить его случайную погрешность методом Корнфельда.
2.Построить график зависимости среднего значения момента закручивающей силы от угла поворота стержня N(φ). На графике отметить максимальную из приборной погрешности (1.8.12) и погрешности разброса значений моментов силы, соответствующих данному углу, представленных в табл. 1.8.1.
3.Убедиться, что график носит линейный характер, т.е. имеет место закон Гука. Вычислить угловой коэффициент графика методом парных точек, определить его погрешность.
4.Вычислить модуль сдвига по формуле (1.8.13) и его погрешность по формуле (1.8.14). Сравнить полученное значение G с табличным.
Задание 2
1.Построить график зависимости момента приложенной силы от угла закручивания стержня, т.е. N(φ). График будет иметь вид петли гистерезиса.
2.Рассчитать площадь фигуры, ограниченной петлей гистерези-
са.
3.Оценить погрешность энергии, ушедшей на нагревание стержня, как полуразность из максимальной и минимальной пло-
134
щадей петель, которые можно провести в пределах приборных погрешностей экспериментальных точек.
ПРЕДСТАВЛЕНИЕ РЕЗУЛЬТАТОВ РАБОТЫ
В заключении к работе по результатам первого задания следует привести рассчитанную величину модуля сдвига для выбранного материала стержня. Сравнить этот результат с табличным значением.
Представить графики зависимости момента силы от угла закручивания для стержней, использованных в заданиях 1 и 2. Сделать вывод о характере полученной зависимости и о соотношении площадей петли гистерезиса для использованных материалов.
По результатам второго задания должна быть приведена оценка для энергии, идущей на нагревание стержня за один цикл деформации, и ее погрешность.
Укажите, какие погрешности играли основную роль в работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Что такое упругая деформация и чем упругая деформация отличается от пластической?
2.Что такое механическое напряжение, какие бывают виды напряжений?
3.При растяжении стержень получил деформацию ε = 0,01. Найти относительное изменение его диаметра при условии, что объем при деформации не изменился.
4.Что такое тензор напряжений?
5.СформулируйтезаконГукадлядеформацийрастяженияисдвига.
6.В каких единицах измеряются модули Юнга и сдвига?
7.Для закручивания стержня диаметром 2 мм на угол 30 град. был приложен момент сил в 1 Н·м. Какой момент силы необходимо приложить для закручивания стержня диаметром 4 мм и той же длины на тот же угол?
8.Что такое предел упругости, предел текучести и предел прочности?
9.Какое явление называется механическим гистерезисом?
10.Какой физический смысл площади петли гистерезиса?
135
11.Как соотносятся площади петли гистерезиса для стали и для
меди?
12.Почему следует сначала закреплять основание стержня в торсионный прибор, и только потом – фиксировать его верхнюю часть?
13.Почему при измерениях надо следить, чтобы угол между динамометром и планкой составлял 90 град.?
14.Как производится настройка динамометра?
15.Почему при измерениях динамометр нужно закреплять на крайние выступы планки?
Табличные значения
Материал |
Модуль сдвига, ГПа |
Латунь |
36 |
Сталь |
80 |
Алюминий |
26 |
ЛИТЕРАТУРА
Основная
1.Савельев И.В. Курс общей физики. Т. 1. М.: Наука, 1970.
С. 173–180.
2.Сивухин Д.В. Общий курс физики. Т. 1. Механика. М.:
Физматлит, 2006. С. 379–400.
3.Светозаров В.В. Основы статистической обработки результатов измерений. М.: МИФИ, 2005.
Дополнительная
4.Нотт Дж.Ф. Основы механики разрушения. М.: Металлур-
гия, 1977. С. 9–30.
5.Ильюшин А.А. Пластичность. Ч. 1. М.: ОГИЗ ГИТТЛ, 1948.
С. 7–23.
136

Работа 1.9
ОПРЕДЕЛЕНИЕ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ
Цель: изучение закона всемирного тяготения и законов динамики твердого тела с помощью весов Кавендиша; определение гравитационной постоянной.
Оборудование: весы Кавендиша; компьютер; программное обеспечение для работы с весами Кавендиша.
ВВЕДЕНИЕ
1.Закон всемирного тяготения
В1678 г. английский физик Исаак Ньютон, анализируя данные многочисленных экспериментов, и, прежде всего, результаты астрономических наблюдений за движением планет, обнаружил, что две материальные точки притягиваются друг к другу с силой, прямо пропорциональной массам этих точек и обратно пропорциональной квадрату расстояния между ними. Это утверждение, названное законом всемирного тяготения, является одним их фундаментальных законов природы, справедливость которого подтверждают многочисленные эксперименты. Гравитационное взаимодействие, наряду с электромагнитным, сильным и слабым взаимодействиями, в настоящее время считается одним из четырех фундаментальных взаимодействий в природе. Именно оно ответственно за образование планет, звезд, галактик.
Ввекторной форме закон всемирного тяготения, можно записать в виде
F |
= G |
m1m2 |
e , |
(1.9.1) |
|
r2 |
|||||
12 |
|
12 |
|
||
где F12 – сила, действующая на материальную точку 1 со стороны 2 |
|||||
(рис. 1.9.1); m1 и m2 – массы материальных точек 1 и 2; e12 |
– еди- |
||||
|
137 |
|
|
||

ничный вектор (орт), проведенный из точки 1 в точку 2; r – расстояние между точками.
m1 F12 e12 m2
r12
Рис. 1.9.1
На материальную точку 2 будет действовать сила притяжения со стороны 1, равная по модулю силе (1.9.1), но направленная в противоположную сторону F21 = −F12 .
Необходимо отметить, что закон всемирного тяготения в форме (1.9.1) применим только для материальных точек, т.е. для тел, размерами которых можно пренебречь по сравнению с расстоянием между ними. В том случае, когда речь идет о неточечных массивных телах, для расчета силы их гравитационного взаимодействия необходимо разбить каждое из тел на маленькие элементарные массы dm1 и dm2 (рис. 1.9.2), которые уже можно считать точечными. Силу взаимодействия между ними d F12 в таком случае можно
найти по формуле:
d F |
= G |
dm1dm2 |
|
e |
, |
(1.9.2) |
r2 |
|
|||||
12 |
|
12 |
|
|
||
|
12 |
|
|
|
|
|
где r12 – расстояние между dm1 и dm2; |
e12 |
– орт вектора, проведен- |
||||
ного из dm1 к dm2. |
|
|
|
|
|
|
Рис. 1.9.2
138

Экспериментально установлено, что для гравитационного взаимодействия справедлив принцип суперпозиции, т.е. на силу притяжения материальных точек dm1 и dm2 не оказывает влияние взаимодействие dm1 с другими частями тела 2. Тогда, для того чтобы найти силу d F1 , с которой dm1 притягивается ко всему второму
телу, нужно сложить вектора сил притяжения dm1, приложенные ко всем точечным массам тела 2:
d F1 = Gdm1 ∫ |
dm2 |
e12 . |
(1.9.3) |
r2 |
|||
12 |
|
|
|
Интеграл в (1.9.3) означает сумму по всем бесконечно малым dm2, составляющим тела 2. Отметим, что e12 и r12 – разные для разных
dm2 и не могут быть вынесены из под знака интеграла. Чтобы рассчитать полную силу притяжения тел 1 и 2, необходимо сложить все силы d F1 для всех частиц, составляющих тело 1:
dm dm
F12 = ∫d F1 = G∫∫ 1 2 2 e12 , (1.9.4) r12
где символ двойного интегрирования означает необходимость сначала сложить все силы по формуле (1.9.3), а затем просуммировать по всем бесконечно малым dm1, входящим в тело 1.
Вычисление сил гравитационного взаимодействия тел по формуле (1.9.4), вообще говоря, представляет собой сложную задачу. Однако для тел, обладающих сферической симметрией (т.е. для тел в форме шара, в которых распределение массы зависит только от расстояния до центра шара), строгое вычисление по формуле (1.9.4) снова приводит к формуле (1.9.1), в которой в качестве r надо взять расстояние между центрами шаров, а в качестве m1 и m2 – их полные массы.
2. Опыт Кавендиша
Численное значение гравитационной постоянной G в законе всемирного тяготения можно вычислить, если измерить силу, с которой взаимодействуют два тела известной массы. Однако это не просто, поскольку силы гравитационного взаимодействия тел, доступных в лабораторных условиях, сравнительно малы. Впервые
139
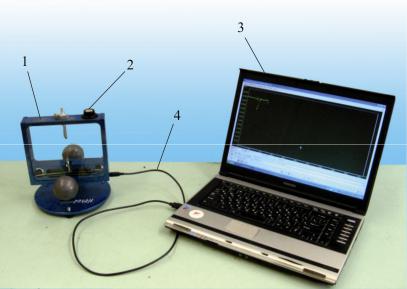
измерить G удалось английскому физику Генри Кавендишу в 1798 г. при помощи крутильных весов. В данной лабораторной работе его опыт будет повторен на современной установке, работающей по тому же принципу. Установка изображена на рис. 1.9.3 и состоит из весов Кавендиша 1, уровня 2, предназначенного для строго горизонтальной установки весов, компьютера 3 со специальным программным обеспечением и USB-кабеля для соединения весов с компьютером 4.
Рис. 1.9.3
Весы Кавендиша представляют собой два маленьких свинцовых шарика 1 (рис. 1.9.4) одинаковой массы, которые расположены на концах коромысла 2 (легкой алюминиевой пластины), подвешенного на тонкой вольфрамовой нити 3, таким образом, что система может совершать свободные крутильные колебания около своего положения равновесия. Значения угла поворота коромысла 2 измеряются с помощью емкостного датчика и фиксируются в памяти компьютера при помощи специального программного обеспечения.
140