

Плясов Лабораторный практикум по курсу обсчей физики 2011
.pdfгде вектор бесконечно малого поворота dφ направлен по оси OZ
(см. рис. 1.17.2).
Подставляя (1.17.5) в (1.17.1), получим уравнение, связывающее момент внешних сил N , приложенных к оси гироскопа, момент импульса ротора гироскопа M и угловую скорость прецессии Ω :
N =[Ω, M]. |
(1.17.6) |
Используем уравнение прецессии (1.17.6) для нахождения связи угловой скорости прецессии с угловой скоростью собственного вращения ротора гироскопа.
Пусть груз, вынуждающий гироскоп прецессировать, подвешен на расстоянии L от оси OZ (см. рис. 1.17.2), т.е. длина отрезка OA = L. Тогда момент силы тяжести груза относительно точки O направлен вдоль оси OY, а его модуль равен:
N = mg L . |
(1.17.7) |
Вектор [Ω, M] также направлен вдоль оси OY, а его модуль оп-
ределяется выражениями (1.17.2) и (1.17.4): |
|
|||||
|
[Ω, M] |
|
=Ω Iω. |
(1.17.8) |
||
|
|
|||||
Приравнивая (1.17.7) и (1.17.8), получим: |
|
|||||
|
Ω = |
mgL |
. |
(1.17.9) |
||
|
|
|||||
|
|
|
|
Iω |
|
|
Таким образом, угловая скорость прецессии гироскопа обратно пропорциональна собственной угловой скорости вращения ротора.
В заключение следует отметить, что изложенная здесь теория гироскопа – приближенная (использовано условие ω Ω). В точной теории гироскопа для получения уравнения его движения используется уравнение моментов (1.17.1) и точное выражение (1.17.3) для момента импульса. Полученное таким образом более сложное уравнение движения описывает не только прецессию, но и нутацию. Нутацией называются сопровождающие прецессию мелкие циклические движения оси гироскопа в направлении, перпендикулярном плоскости прецессии. На используемой в работе установке нутацию можно непосредственно наблюдать при малых собственных частотах вращения ротора гироскопа.
241
ОПИСАНИЕ УСТАНОВКИ
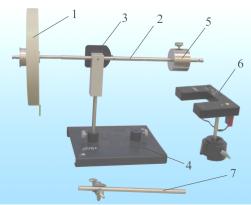
Установка, используемая в работе для изучения свойств гироскопа, представлена на рис. 1.17.3.
Рис. 1.17.3
Гироскоп представляет собой массивный диск 1, закрепленный на оси 2 (см. рис. 1.17.3). Ось 2 вместе с двумя другими осями образуют карданов подвес 3, установленный на массивную опору 4. Для того чтобы сделать гироскоп свободным, т.е. уравновесить массивный диск – ротор используется противовес 5. Положение противовеса устанавливается на покоящемся гироскопе так, чтобы его собственная ось 2 была расположена горизонтально, и в дальнейшем не меняется.
Для измерения времени в установке используется световой барьер с электронным секундомером 6.
Для создания внешней силы, действующей на свободный гироскоп и приводящей к его прецессии, используется груз, который можно подвешивать в специально сделанную выемку на конце оси гироскопа 2, на котором установлен противовес 5 (см. рис. 17.3).
Чтобы раскрутить гироскоп в установке используется шнур, который наматывается на блок, находящийся на стороне ротора, обращенной от точки подвеса. Запуск гироскопа осуществляется путем быстрого выдергивания шнура одной рукой, при зафиксированной другой рукой оси гироскопа.
242
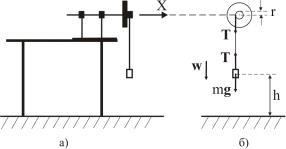
В первом задании настоящей работы для определения момента инерции ротора гироскопа его собственную ось необходимо стационарно зафиксировать. Для этого в установке используются стержень и зажим 7. Стержень устанавливается в свободное гнездо массивной опоры 4 (см. рис. 1.17.3) и к его верхнему концу с помощью зажима закрепляется ось гироскопа 2. В итоге гироскоп с закрепленной осью выглядит так, как показано на рис. 1.17.4, а.
Для приведения диска гироскопа во вращение в первом задании на блок ротора наматывается шнур, к концу которого подвешивается груз (см. рис. 1.17.4, а).
Подробно рассмотрим динамику такой системы. Первоначально груз находится на высоте h над полом и покоится (см. рис. 1.17.4, б). Затем его отпускают и он начинает двигаться вниз с некоторым ускорением w. При этом диск гироскопа начинает вращаться вокруг своей оси OX с некоторым угловым ускорением βx.
Рис. 1.17.4
На груз действуют две силы – сила тяжести mg и сила натяжения шнура T (см. рис. 1.17.4, б). Для описания движения груза используем второй закон Ньютона в проекции на вертикальную ось:
mw = mg −T . |
(1.17.10) |
Момент силы натяжения шнура, действующей на блок, относительно центра блока направлен вдоль оси OX и равен N = T·r, где r – радиус блока ротора, на который намотан шнур (см. рис. 1.17.4, б). Поэтому проекция уравнения вращательного движения ротора (1.17.1) на ось OX с учетом (1.17.4) принимает вид
I βx =Tr . |
(1.17.11) |
243
Дополним эти два уравнения движения уравнением связи углового ускорения ротора и линейного ускорения груза:
w = rβx . |
(1.17.12) |
Тогда, решая систему уравнений (1.17.1)–(1.17.3), получим выражение для ускорения движения груза:
w = |
|
g |
. |
(1.17.13) |
|
|
|
I |
|||
1 + |
|
|
|
||
|
mr2 |
|
|
||
|
|
|
|
|
|
Так как груз движется равноускоренно из состояния покоя, то он пройдет расстояние h за время t, причем h = wt2/2. Используя (1.17.3), получим зависимость квадрата времени движения груза от высоты h:
t |
2 |
= h |
2 |
|
+ |
I |
|
|
|
|
|
1 |
|
|
. |
(1.17.14) |
|||
|
g |
mr |
2 |
||||||
|
|
|
|
|
|
|
|
Таким образом, зависимость квадрата времени от высоты – ли-
нейная, т.е. t2 = kh , где угловой коэффициент прямой k определяется выражением
k = |
2 |
|
+ |
I |
|
|
|
|
1 |
|
|
. |
(1.17.15) |
||
g |
mr |
2 |
|||||
|
|
|
|
|
|
Поэтому для определения момента инерции гироскопа относительно собственной оси необходимо измерить зависимость времени движения груза от высоты h, построить график t2(h), рассчитать угловой коэффициент полученной прямой, и по нему, используя (1.17.15), вычислить момент инерции.
ПРАВИЛА ТЕХНИКИ БЕЗОПАСНОСТИ
1.Во время движения гироскопа не допускайте нахождение посторонних предметов на его пути.
2.Располагайте опору светового барьера так, чтобы гироскоп при своем движении не задевал ее.
3.Перед запуском гироскопа в первом задании убедитесь, что его ось тщательно закреплена.
244

4.Перед запуском гироскопа во втором и третьем задании убедитесь, что противовес прочно закреплен на его оси.
5.При запуске гироскопа во втором и третьем задании одной рукой дергайте за шнур, а другой крепко держите ось. И только после того как шнур отсоединился от ротора, отпускайте ось без толчка.
6.При запуске гироскопа не прилагайте излишних усилий к его оси, чтобы не погнуть ее!
ЗАДАНИЯ
Задание 1. Определение момента инерции ротора гироскопа
1.Закрепите ось гироскопа горизонтально с помощью стержня
изажима (см. рис. 1.17.4, а).
2.Измерьте штангенциркулем радиус r блока и запишите в лабораторный журнал.
3.Петлю на шнуре наденьте на крючок блока и намотайте шнур на блок. На свободный конец шнура подвесьте груз с максимальной массой m (m = 60 г, т.е. груз с крюком и пять грузов с прорезью).
4.Удерживая ротор от вращения, установите начальную высоту груза над полом h = 30 см с помощью линейки.
5.Отпустите ротор и измерьте время падения груза t . Результат запишите в заранее подготовленную табл. 1.17.1.
6.Повторите действия пп. 3 и 4 еще два раза.
7.Повторите действия пп. 3–5 для других значений начальной
высоты груза над полом в диапазоне h = 30–80 см через каждые 10 см. Результаты измерений записывайте в табл. 1.17.1.
Таблица 1.17.1
h, см |
|
ti , c |
|
t , c |
t, c |
t2 , c2 |
(t2 ), c2 |
|
1 |
2 |
3 |
||||||
|
|
|
|
|
||||
30 |
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
245
Задание 2. Наблюдение прецессии гироскопа
1.Освободите ось гироскопа 2 из фиксатора 9. Полностью отсоедините фиксатор и его стержень от опоры. Перемещая противовес 5, уравновесьте гироскоп, т.е. добейтесь, чтобы у покоящегося гироскопа ось была горизонтальна. Закрепите противовес в этом положении.
2.Один из концов шнура закрепите на крючке блока ротора и намотайтенить наблок.
3.Быстро дернув за нить, крепко придерживая при этом ось гироскопа рукой, раскрутите гироскоп. Отпустите ось гироскопа.
4.Легко ударяя карандашом или ручкой по оси гироскопа: по горизонтали (вправо, влево), по вертикали (вверх, вниз), пронаблюдайте, как реагирует на ваши удары гироскоп (его ось). Результаты наблюдений отразите в лабораторном журнале, схематически зарисовав направление реакции гироскопа на внешнее воздействие (на рисунках укажите направление вращения ротора). Сравните поведение раскрученного и не раскрученного гироскопа.
5.Подвесьте на ось гироскопа 2 в специально сделанную за противовесом выемку (см. рис. 1.17.3) груз массой m = 10 г (груз с крюком). Пронаблюдайте за прецессией гироскопа. Установите, от чего зависит величина и направление скорости прецессии. Для этого при постоянной массе груза пронаблюдайте за скоростью прецессии при уменьшении скорости вращения ротора со временем.
6.Снова запустите гироскоп и подвесьте на него груз массой m = 20 г (т.е. груз с крюком и один груз массой m = 10 г, груз с прорезью). Проследите, как при этом изменится скорость прецессии. В лабораторном журнале схематически изобразите гироскоп, и на нем укажите направление угловой скорости вращения ротора, угловой скорости прецессии, направление внешней силы.
7.Пронаблюдайте за режимом нутации. Если вы удерживали ось вращения от прецессии, то, отпустив ее, вы обязательно получите нутации. Рассмотрите нутации в случае толчка оси гироскопа
внаправлении прецессии; толчка в противоположном направлении; толчка оси вниз и вверх.
246
Задание 3. Изучение прецессии гироскопа
1.Включите источник питания светового барьера в сеть. Поставьте переключатель на световом барьере в режим измерения периода  . При этом после нажатия кнопки «Set» на его экране должны отображаться три точки.
. При этом после нажатия кнопки «Set» на его экране должны отображаться три точки.
2.Установите световой барьер на лабораторном столе так, чтобы полоска бумаги, приклеенная к диску гироскопа, при его вращении пересекала световой луч барьера.
3.Уравновесьте свободный гироскоп, перемещая противовес 5 (см. рис. 1.17.3). Тщательно закрепите противовес.
4.С помощью нити, укрепленной на блоке диска, раскрутите диск свободного гироскопа, придерживая его ось рукой, а затем отпустите ее.
5.Нажмите на кнопку «Set» светового барьера и измерьте вре-
мя одного оборота диска T0. Результат запишите в заранее подготовленную табл. 1.17.2.
6.Отодвиньте световой барьер в сторону так, чтобы он не мешал дальнейшей прецессии гироскопа.
7.Быстро подвесьте груз массой m = 30 г в углубление на оси гироскопа, расположенное за противовесом. При этом гироскоп начнет прецессировать.
8.С помощью секундомера измерьте период прецессии TП, т.е. время одного оборота оси гироскопа в горизонтальной плоскости. Занесите измеренное значение периода прецессии в табл. 1.17.2. Если во время прецессии ось вращения гироскопа быстро наклоняется так, что до касания грузом стола гироскоп не успевает сделать один оборот, значит, он был недостаточно сильно раскручен. В таком случае снова повторите пп. 4–8.
Таблица 1.17.2
m, г |
T0 , c |
TП, c |
ω, c−1 |
ω, c-1 |
ω−1, c |
(ω−1 ), c |
Ω, c−1 |
ΔΩ, c−1 |
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
… |
… |
… |
… |
… |
… |
… |
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
… |
… |
… |
… |
… |
… |
… |
247
9.Повторите пп. 4–8 еще 6–8 ра, меняя усилие, прикладываемое при запуске гироскопа.
10.Повторите измерения пп. 4–9 с массой груза m = 60 г.
ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
Задание 1
1. Для каждой начальной высоты h рассчитайте среднее время падения груза и его погрешность методом Корнфельда. Вычислите квадрат времени падения и его погрешность по формуле (t2) =
=2t t.
2.Постройте график зависимости квадрата времени падения груза t2 от начальной высоты h. Сделайте вывод о согласии полученной зависимости с теоретической зависимостью (1.17.14).
3.Методом парных точек определите угловой коэффициент наклона прямой t2(h) и его погрешность.
4.По полученному значению углового коэффициента k с помощью формулы (1.17.15) вычислите момент инерции ротора гироскопа. Определите его погрешность по формуле:
|
|
I |
|
|
k 2 |
|
m 2 |
|
2 r 2 |
|
||||
εI |
= |
|
= |
|
|
|
+ |
|
|
+ |
|
. |
(1.17.16) |
|
I |
k |
m |
r |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
Задание 3
1. Для каждого измерения рассчитайте частоту собственного вращения ротора и частоту прецессии гироскопа по формулам
|
|
|
|
ω= |
2π |
, |
Ω = |
2π |
|
|
|
(1.17.17) |
|||
|
|
|
|
T |
T |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
0 |
|
|
|
|
П |
|
|
|
|
и их погрешности по формулам |
|
|
|
|
|
|
|
|
|||||||
ε |
|
= |
Δω |
= |
|
T0 |
, |
ε |
|
= |
ΔΩ |
= |
TП . |
(1.17.18) |
|
ω |
ω |
|
ω |
Ω |
|||||||||||
|
|
|
T |
|
|
|
|
T |
|
||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
П |
|
2. В качестве абсолютных погрешностей периодов возьмите приборные погрешности светового барьера и секундомера:
T0 = 0,01 c и TП = 1 c.
248
3.Рассчитайте величину, обратную частоте собственного вращения ротора 1/ω, и ее погрешность по формуле ε1/ω = εω.
4.На одном листе постройте два теоретических графика зависимости Ω(1/ω), соответствующие двум массам груза, рассчитанные по формуле (1.17.9) с использованием табличного значения момента инерции ротора гироскопа.
5.На графики нанесите экспериментальные точки с погрешностями. Сделайте вывод о согласии экспериментальных результатов
стеорией.
ПРЕДСТАВЛЕНИЕ РЕЗУЛЬТАТОВ РАБОТЫ
В заключении к работе по результатам первого задания должен быть представлен график зависимости квадрата времени опускания груза от начальной высоты. Должны быть приведены рассчитанный угловой коэффициент графика и определенное экспериментально значение момента инерции ротора гироскопа. Необходимо сравнить полученный результат с приведенным ниже табличным значением.
По результатам второго задания необходимо представить выводы о характере прецессии и нутации оси гироскопа в зависимости от величины и направления внешнего воздействия.
По результатам третьего задания должны быть представлены графики зависимостей частоты прецессии гироскопа от обратной частоты вращения ротора для двух значений массы груза. Сделать выводы о характере зависимости частоты прецессии гироскопа, как от обратной частоты собственного вращения, так и от масс груза.
Табличные значения |
|
|
|
|
|
Ускорение свободного падения |
g = 9,81 м/с2 |
|
Момент инерции ротора гироскопа |
I = 8,9·10-3 кг·м2 |
|
Расстояние от точки подвеса гироскопа |
L = 27 см |
|
до точки приложения нагрузки |
||
|
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Дайте определение момента инерции тела относительно произвольной оси.
249
2.Что такое свободный гироскоп?
3.Как устроен карданов подвес? Сколько степеней свободы имеет подвешенный в нем гироскоп?
4.Каким образом в установке гироскопу обеспечиваются три степени свободы?
5.Если приложить силу к внешней (внутренней) рамке, стараясь повернуть ее вокруг вертикальной (горизонтальной) оси, то как поведет себя невращающийся и вращающийся гироскопы?
6.Что такое прецессия гироскопа?
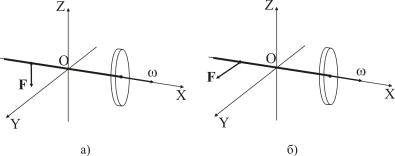
7.Покажите направление прецессии вращающегося с угловой скоростью ω гироскопа, если на него действует сила F, направленная как показано на рис. 1.17.5.
8.Как зависит угловая скорость прецессии гироскопа Ω от массы груза т, подвешенного к оси ротора гироскопа (при неизменном положении точки крепления груза)?
9.Как зависит угловая скорость прецессии гироскопа Ω от угловой скорости ω вращения ротора?
10.Как зависит угловая скорость прецессии гироскопа Ω от момента инерции I ротора при постоянной скорости ω ротора гироскопа и неизменных массе т и положении L груза?
11.Как в настоящей работе измеряется момент инерции ротора гироскопа?
Рис. 1.17.5
12.Как влияют силы трения на поведение оси гироскопа?
13.Что такое нутация?
250