

Михеев Теоретические основы специалности Елементная база автоматических систем Лабораторный практикум 2012
.pdfМинистерство образования и науки Российской Федерации
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ЯДЕРНЫЙ УНИВЕРСИТЕТ «МИФИ»
В. П. Михеев
Теоретические основы специальности «ЭЛЕМЕНТНАЯ БАЗА АВТОМАТИЧЕСКИХ СИСТЕМ»
ЛАБОРАТОРНЫЙ ПРАКТИКУМ
Рекомендовано УМО «Ядерные физика и технологии» в качестве учебного пособия
для студентов высших учебных заведений
Москва 2012
УДК.681.5(076.5) ББК 32.965я7 М69
Михеев В. П. Теоретические основы специальности «Элементная база автоматических систем». Лабораторный практикум: Учебное пособие. –
НИЯУ МИФИ, 2012. – 68 с.
Пособие посвящено изучению элементов автоматических систем, относящихся к исполнительным устройствам.
Рассматриваются тиристорные усилители, электромагнитные механизмы, двигатели постоянного тока, асинхронные и синхронные двигатели, шаговые двигатели. Основное внимание уделяется изучению способов управления этими элементами и их статических и динамических характеристик.
Управление лабораторными стендами осуществляется от персонального компьютера через диалоговое окно. В интерфейсе используются блоки фирмы УМИКОН.
Подготовлено в рамках Программы создания и развития НИЯУ МИФИ.
Рецензент 1-й зам. главн. конструктора ФГУП «ВНИИА им. Н.Л. Духова, д-р техн. наук В. Л. Кишкин
ISBN 978-5-7262-1774-1 |
© Национальный исследовательский |
|
ядерный университет «МИФИ», 2012 |
Редактор Е.К. Коцарева
Оригинал-макет подготовлен Е.Н. Кочубей
Подписано в печать 15.11.2012. Формат 60х84 1/16 Уч.-изд. л. 5,5. Печ. л. 5,5. Тираж 150 экз.
Изд. № 53/1. Заказ № 52.
Национальный исследовательский ядерный университет «МИФИ». 115409, Москва, Каширское ш., д. 31.
ООО “Полиграфический комплекс “Курчатовский”. 144000, Московская область, г. Электросталь, ул. Красная, д. 42
ОГЛАВЛЕНИЕ |
|
Общая часть .................................................................................................. |
4 |
Лабораторная работа № 1. ИССЛЕДОВАНИЕ |
|
ТИРИСТОРНОГО УСИЛИТЕЛЯ........................................................... |
7 |
Введение................................................................................................... |
7 |
Описание лабораторной установки...................................................... |
18 |
Методика выполнения работы.............................................................. |
20 |
Оформление отчета................................................................................ |
20 |
Лабораторная работа № 2. ИССЛЕДОВАНИЕ |
|
ЭЛЕКТРОМАГНИТНЫХ МЕХАНИЗМОВ ....................................... |
21 |
Введение................................................................................................. |
21 |
Описание лабораторной установки ..................................................... |
33 |
Методика выполнения работы ............................................................. |
36 |
Оформление отчета ............................................................................... |
37 |
Лабораторная работа № 3. ИССЛЕДОВАНИЕ |
|
ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА.............................................. |
38 |
Введение ................................................................................................ |
38 |
Описание лабораторной установки...................................................... |
40 |
Методика выполнения работы ............................................................ |
43 |
формление отчета .................................................................................. |
44 |
Лабораторная работа № 4. ИССЛЕДОВАНИЕ |
|
ДВУХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ......................... |
44 |
Введение ................................................................................................ |
44 |
Описание лабораторной установки ..................................................... |
48 |
Методика выполнения работы.............................................................. |
50 |
Оформление отчета................................................................................ |
51 |
Лабораторная работа № 5. ИССЛЕДОВАНИЕ |
|
ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ ......................... |
52 |
Введение ................................................................................................ |
52 |
Описание лабораторной установки...................................................... |
53 |
Методика выполнения работы.............................................................. |
55 |
Оформление отчета................................................................................ |
56 |
Лабораторная работа № 6. ИССЛЕДОВАНИЕ |
|
ШАГОВОГО ДВИГАТЕЛЯ.................................................................. |
56 |
Введение ................................................................................................ |
56 |
Описание лабораторной установки...................................................... |
66 |
Методика выполнения работы.............................................................. |
67 |
Оформление отчета................................................................................ |
68 |
Список литературы...................................................................................... |
68 |
3
ОБЩАЯ ЧАСТЬ
Лабораторный практикум по исследованию элементов автоматических систем является частью лабораторного практикума «Цифровые системы управления (ЦСУ)», который строится на базе программно-технического комплекса (ПТК) УМИКОН. Его программное обеспечение использует комплекс программного обеспечения (КПО) МикСИС, основным компонентом которого является ядро реального времени для ОС Windows – программный комплекс
MWBridge.
В состав комплекса технических средств входят авторизированные рабочие места (АРМ) преподавателя, студентов, а также лаборанта, объединенные в единую локальную сеть. К компьютерам АРМ студентов и лаборанта подключены по полевым шинам на базе интерфейса RS485 модули контроллеров комплекса технических средств (КТС) МикКОН ПТК УМИКОН – моноблокрегулятор МВ100 и модуль центрального процессора РС100.
Распределение основных функций между АРМ следующее. АРМ студента обеспечивает:
настройку и программирование модулей контроллеров, включая блокировки и регулирование;
конфигурирование и настройку базы данных реального времени (БД РВ);
прием данных от контроллеров и выдачу управляющих воздействий;
отображение и архивирование принятых данных и команд управления;
построение специализированного интерфейса пользователя – мнемосхем;
конфигурирование и поддержку сетевого обмена с другими АРМ, включая АРМ преподавателя;
разработку и выполнение технологических программ верхнего уровня.
Кроме собственно компьютера, в состав АРМ студента входят микропроцессорные контроллеры, выполняющие функции:
а) РС100:
выполнение технологических программ, прием и выдача дискретных сигналов,
4
маршрутизация обмена по полевым шинам;
б) МВ100:
прием, обработка и выдача аналоговых и дискретных сигналов, отработка технологических блокировок, регулирование.
АРМ преподавателя выполняет функции контроля и архивации данных от АРМ студента и выдачи в него команд управления, поэтому включает ПО, поддерживающее:
конфигурирование и настройку базы данных реального времени (БД РВ);
отображение и архивирование принятых данных и команд управления;
построение специализированного интерфейса пользователя – мнемосхем;
конфигурирование и поддержку сетевого обмена с другими АРМ;
разработку и выполнение технологических программ верхнего уровня.
Контроллеры в состав АРМ преподавателя не входят, используются поступающие по сети данные от АРМ студентов и лаборанта.
АРМ лаборанта служит для диагностики, настройки и восстановления аппаратных и программных средств лаборатории и включает в себя весь набор ПО других АРМ:
настройку и программирование модулей контроллеров, включая блокировки и регулирование;
конфигурирование и настройку базы данных реального времени (БД РВ);
прием данных от контроллеров и выдачу управляющих воздействий;
отображение и архивирование принятых данных и команд управления;
построение специализированного интерфейса пользователя – мнемосхем;
конфигурирование и поддержку сетевого обмена с другими АРМ, включая АРМ преподавателя;
разработку и выполнение технологических программ верхнего уровня.
5
Кроме того, в состав АРМ лаборанта входят микропроцессорные контроллеры, аналогичные АРМ студента и выполняющие функции:
а) РС100:
выполнение технологических программ, прием и выдача дискретных сигналов, маршрутизация обмена по полевым шинам;
б) МВ100:
прием, обработка и выдача аналоговых и дискретных сигналов, отработка технологических блокировок, регулирование.
Для поддержки вышеперечисленных функций на АРМ, кроме упомянутого ПО ядра реального времени MWBridge, устанавливается ПО технологического программирования верхнего уровня RSProg, ПО разработки и поддержки графического интерфейса оператора Display, а также прикладное ПО, созданное с помощью технологических систем программирования в рамках MWBridge и RSProg и разработки графического интерфейса оператора Display.
На микропроцессорных контроллерах поддержание выполнения вышеуказанных для них функций установлены:
а) на РС100:
ПО исполняющей системы алгоблоков среднего уровня, прикладная технологическая программа; б) на МВ100:
ПО исполняющей системы нижнего уровня.
Настройка и конфигурирование ПО контроллеров осуществляется с соответствующих АРМ в рамках подсистем настройки и технологического программирования ПО MWBridge.
Взаимодействие контроллеров между собой и с компьютерами АРМ осуществляется по протоколу MODBUS RTU на основе физических интерфейсов RS485 и USB. Взаимодействие АРМ осуществляется по сети Ethernet по протоколам семейства TCP/IP.
Краткое описание ПО приводится во введении к лабораторному практикуму «Цифровые системы управления (ЦСУ)», а более подробное – в руководствах пользователя к ПО MWBridge, RSProg и Display.
6
Лабораторная работа № 1
ИССЛЕДОВАНИЕ ТИРИСТОРНОГО УСИЛИТЕЛЯ
Введение
В настоящее время в системах автоматического управления (САУ) широко используются электрические устройства на основе тиристоров – управляемых многослойных полупроводниковых приборов ключевого действия.
Тиристорные преобразователи успешно конкурируют с контактными электромагнитными реле и контакторами, магнитными и электромашинными усилителями и преобразователями.
Большинство тиристорных преобразователей с большой выходной мощностью весьма схожи по принципу действия и являются, по сути дела, устройствами, управляющими с помощью сигналов малой мощности потоком электрической энергии от источника энергии к нагрузке.
Тиристор представляет собой четырехслойную структуру, имеющую три электрода: анод, катод и управляющий электрод. Питающее напряжение прикладывается к аноду и катоду.
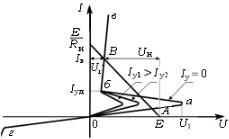
Вольт-амперные характеристики тиристора представлены на рис. 1.1.
При подаче на главные электроды тиристора постоянного напряжения (“+” источника подключен к аноду) ток, протекающий через прибор, очень мал, так как один из p-n-переходов смещен в обратном направлении. При увеличении напряжения ток растет незначительно. Этот участок характеристики напоминает характеристику обратно смещенного диода. Когда приложенное напряжение достигнет некоторой критической величины U1, происходит лавинообразное отпирание переxода, сопротивление тиристора резко падает и ток существенно увеличивается.
7
Установившееся значение тока определяется величиной приложенного напряжения E и сопротивлением нагрузки Rн. Большая часть приложенного напряжения уравновешивается падением напряжения на нагрузке Uн, и лишь незначительная его часть Uт падает на самом тиристоре (см. рис. 1.1).
Угол наклона нагрузочной прямой АB на рис. 1.1 определяется величиной сопротивления нагрузки Rн и напряжением Е.
Если подать на управляющий электрод напряжение, смещающее закрытый переход в прямом направлении, то лавинообразный процесс нарастания тока начнется при напряжении, меньшем, чем U1. Таким образом, тиристор может быть открыт с помощью сигнала управления и будет оставаться в открытом состоянии при снятии этого сигнала. Отсюда следует, что импульсным сигналом управления можно открыть тиристор, но закрыть его сигналом управления противоположной полярности нельзя.
Для запирания тиристора необходимо снизить ток, протекающий через него до некоторого значения, называемого током удержания Iуд. Значение тока удержания существенно меньше величины рабочего тока, протекающего через тиристор в открытом состоянии, поэтому для качественного анализа можно считать, что для запирания тиристора необходимо снизить ток, протекающий через него, до нуля. Сделать это можно, уменьшив напряжение питания, увеличив сопротивление нагрузки, создав встречный запирающий ток от дополнительного источника или с помощью специальной схемы.
Тиристор, в котором сигнал управления вызывает только отпирание прибора и не может влиять на его запирание, называется однооперационным. В литературе обычно слово “однооперационный” опускается и под термином “тиристор” понимается именно однооперационный прибор.
Используя более сложную структуру прибора, можно обеспечить и отпирание, и запирание тиристора с помощью управляющих импульсов различной полярности. Такие тиристоры называются
двухоперационными.
8
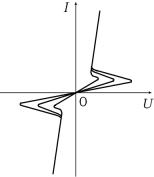
При усложнении структуры тиристора можно получить вольтамперную характеристику вида рис. 1.2. Такой тиристор называет-
ся симистором.
На рис. 1.3 показаны условные обозначения рассмотренных приборов на электрических схемах: 1 – общее обозначение тиристора; 2 – тиристор с прианодным управлением; 3 – тиристор с прикатодным управлением; 4 – двухоперационный тиристор; 5, 6 – симистор.
|
1) |
2) |
3) |
||
|
|
4) |
5) |
6) |
|
|
|
|
Рис. 1.3 |
|
|
Из |
рассмотрения вольт- |
|
|||
амперных характеристик |
ти- |
|
|||
ристора и нагрузки следует, |
|
||||
что для работы тиристора в |
|
||||
режиме |
ключа |
необходимо |
|
||
правильно выбрать нагрузку, |
|
||||
или наоборот, подобрать пра- |
|
||||
вильно |
тиристор |
к заданной |
|
||
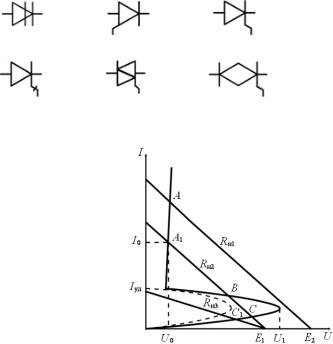
нагрузке. На рис. 1.4 показана |
|
||||
вольт-амперная |
характери- |
|
|||
стика тиристора и три вариан- |
|
||||
та активной нагрузки Rн. |
|
Рис. 1.4 |
|||
Нагрузочная |
прямая |
для |
|||
|
|||||
Rн1 пересекает вольт-амперную характеристику тиристора в одной точке А, которая соответствует открытому состоянию тиристора, т.е. тиристор открывается и без управляющего сигнала. Очевидно, что в данном случае напряжение питания E2 слишком велико.
Если уменьшить напряжение питания до E1, то при той же величине активного сопротивления (прямая Rн2) нагрузочная прямая пересекает вольт-амперную характеристику уже в трех точках: А1, B и С. Две из них являются устойчивыми и соответствуют открытому (т.
9
А1) и закрытому (т. С) состоянию тиристора. При такой нагрузке тиристор будет открываться при приходе управляющего импульса (вольт-амперная характеристика показана пунктиром) и закрываться при уменьшении тока через него меньше тока удержания Iуд.
Нагрузочная прямая Rн3, которая соответствует большему, чем ранее, значению сопротивления нагрузки и напряжению питания E1, также пересекает вольт-амперную характеристику тиристора в одной точке С1, соответствующей закрытому состоянию тиристора, так как ток через тиристор меньше тока удержания Iуд.
Таким образом, если задана нагрузка, т.е. напряжение питания E и наклон нагрузочной прямой (значение Rн активного сопротивления), то тиристор нужно выбирать со значением U1 > E. Значение U1 всегда приводится в паспортных данных. Кроме этого необходимо, чтобы ток через тиристор в открытом состоянии I0 не превышал предельно допустимого тока, который тоже указывается в паспортных данных. И наконец, средняя мощность рассеяния Pрас на тиристоре не должна превышать максимально допустимого значения.
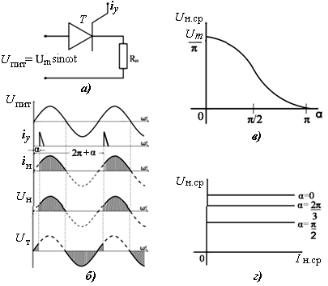
Рассмотрим схему простейшего ТУ на одном тиристоре (рис. 1.5, а).
Рис. 1.5
10