

Михеев Теоретические основы специалности Елементная база автоматических систем Лабораторный практикум 2012
.pdfгде φ – угол сдвига фаз между Ф1 и Ф2, равный сдвигу фаз между I1
и I2.
Преобразуя последнее выражение, получаем:
qT = Q1cp +Q2cp −[Q1cp cos 2ωt +Q2cp cos(2ωt + 2ϕ)],
Пульсация силы тяги будет равна нулю, если Q1cp cos 2ωt +Q2cp cos(2ωt + 2ϕ) = 0. Для выполнения этого условия
необходимо, чтобы Q |
= Q |
2cp |
, ϕ= π . |
1cp |
|
2 |
|
|
|
|
В реальных электромагнитах в диапазоне полного перемещения якоря условие φ = π/2 выполнить практически невозможно, так как при перемещении якоря изменяется индуктивность обмоток, что
приводит к изменению фазового сдвига между токами I1 и I2 ).
Обычно выбирают емкость конденсатора С из условия получения угла φ, близкого к π/2, при том положении якоря, которое он занимает большую часть времени работы.
Конструктивно и технологически более простым и экономичным способом получения сдвига фаз между двумя потоками является использование короткозамкнутых обмоток (электромагнитных экранов), которые охватывают часть магнитопровода,. На рис. 2.12, а приведена схема ЭММ с таким экраном, а на рис. 2.12, б – векторная диаграмма для магнитной цепи. Поток в части магнитной
цепи, охваченной витками короткозамкнутой катушки экрана wэ , определяется НС катушки управления wу и НС катушки экрана.
Рис. 2.12 
Используя метод суперпозиции, этот поток представим в виде: Ф′2 = Ф2 + Фэ, где Ф2 – поток, определяемый сигналом управления; Фэ – поток, определяемый током Iэ в экране.
31

Поток Ф′2 индуцирует в катушке wэ ЭДС Eэ, отстающую от него
на π/2. Ток в экране Iэ отстает от Еэ на небольшой угол, зависящий от величины потока рассеяния катушки wэ. Поток же Фэ совпадает по фазе с Iэ. Вычитая Фэ из Ф′2 , найдем Ф2, который совпадает с Ф1.
Суммируя Ф1 с частью потока экрана Ф′э (с обратным экраном), проходящего по участку сердечника, не охваченного экраном, получаем результирующий поток Ф1′, проходящий по этому участку магнитопровода. Потоки Ф1′ и Ф′2 с фазовым сдвигом φ и создают
составляющие силы тяги qТ1 и qТ2. Практически угол φ в данной схеме невозможно сделать равным π/2.
Описание лабораторной установки
Электромагнитные механизмы широко используются в качестве исполнительных механизмов. Широко распространены как ЭММ постоянного тока, так и ЭММ переменного тока. В данной работе исследуются тяговые и регулировочные характеристики в релейном и непрерывных режимах.
При исследовании этих характеристик необходимо измерять такие механические величины, как линейное перемещение и силу тяги, что подразумевает использование соответствующих датчиков.
В данной работе исследуются ЭММ постоянного и переменного тока. Для задания перемещения используется линейный шаговый двигатель, а для измерения силы тяги – датчик силы. На рис.
2.13 показан внешний вид ЭММ переменного тока типа ЭМЗЗ-4.
|
Характеристики ЭММ типа ЭМЗЗ-4 |
|
Номинальный ход якоря: 15 мм. |
|
Номинальное тяговое усилие: 16 N. |
|
Номинальная частота включений в час: |
|
3200. |
|
Время срабатывания: 200 мс. |
|
Время возврата: 220 мс. |
Рис. 2.13 |
Номинальная активная мощность: 32 Вт. |
32
Степень защиты: IP 00. Номинальное напряжение: 220В Масса: 1,5 кг.
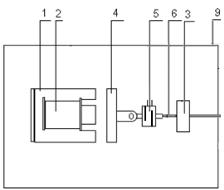
Габаритные размеры: 60 × 95 × 70 мм3 Схема макета представлена на рис. 2.14. Он включает в себя
электромагнит, состоящий из магнитопровода 1, катушки 2 и якоря 4, линейного шагового двигателя (ШД) 3 с штоком 6, датчика силы 5. Все перечисленные элементы закреплены на панели 9.
Рис. 2.14
Вкачестве ШД выбран двухфазный двигатель – актуатор
57BYZ.
Вкачестве датчика силы используется S-образный датчик силы растяжения и сжатия c диапазоном измерения от 0 до 50 Н.
Внешний вид макета представлен на рис. 2.15. Электромагнит 2 типа ЭМЗЗ-4 закреплен на стойке 1. Якорь электромагнита связан с S-образным датчиком силы типа UU-K5. С другой стороны датчик силы связан с штоком 5 линейного шагового двигателя 6 типа
57BYZ.
На рис. 2.16 приведена блок-схема блока управления. Блок управления выполняет следующие функции:
вырабатывает несколько переменных напряжений на катушку электромагнита (0,1; 0.2; 0,3; 0,5; 0,7; 1,0; 1,2 от номинального напряжения 220 В);
усиливает сигнал с датчика силы тяги; вырабатывает сигналы управления ШД; осуществляет связь с ПК.
33

Рис. 2.15
Рис. 2.16
Управление питающими напряжениями и съем данных осуществляется ПК через специальное окно.
На рис. 2.17 представлен схема блока управления. Подключение различных напряжений к обмотке ЭММ произво-
дится с помощью симмисторов С1 С7, которые по сигналу от ПК замыкают на корпус различные выводы трансформатора Тр.
Операционный усилитель усиливает сигнал с датчика тягового
усилия Qт.
Блок управления ШД типа SMSD-3,0.
Две группы симмисторов осуществляют подключение обмотки ЭММ к различным напряжениям переменного или постоянного тока, что позволяет снимать тяговые и регулировочные характери-
34

стики при различных видах питания (переменного или постоянного тока).
Рис. 2.17
35
Методика выполнения работы
1. Снять семейство тяговых характеристик при разных напряжениях на обмотке ЭММ Qт = f(δ), где Qт – тяговое усилие; δ - воздушный зазор между якорем и магнитопроводом.
Для этого сделать следующее:
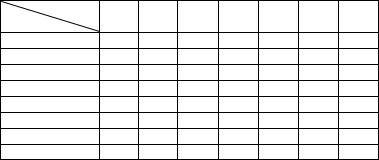
1)установить значение напряжение питания ЭММ Uy = 40В и, задавая значения воздушного зазора от 1 мм до 15мм (через 2 мм), снять показания датчика силы и занести их в табл. 2.1.
2)заполнить табл. 2.1 для остальных значений Uy.
Таблица 2.1
Uy,В |
40 |
80 |
120 |
160 |
200 |
240 |
280 |
δ,мм |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
13 |
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
3)построить семейство тяговых характеристик Qт = f(δ);
4)построить семейство регулировочных характеристик δ = f(Uу) для различных Qт.
Снять механическую характеристику пружины Qм = f(δ). Для этого:
установить ШД в положение δ = 0;
установить Uy = Uн:
снять показания датчика силы Qт, которое будет равно силе пружины Qпр при δ = δк;
установить Uy = 0;
снять показания датчика силы Qт, которое будет равно силе пружины Qпр при δ = δн;
по двум точкам построить зависимость Qпр = f(δ). Рассчитать жесткость пружины γ = tg Q/ δ.
36
2.Снять реулировочную характеристику δ = f(Uу) с реальной пружиной. Определить напряжения срабатывания и отпускания ЭММ.
3.Повторить измерения по п.1 при питании катушки электромагнита от источника постоянного напряжения 24 В. Для этого сделать следующее:
1) перейти в окно, соответствующее питанию от постоянного тока;
2) заполнить табл. 2.2.
Таблица 2.2
Uу, В 4 |
8 |
12 |
16 |
20 |
24 |
28 |
δ, мм
1
3
5
7
9
11
13
15
3)построить семейство тяговых характеристик Qт = f(δ) для различных Uy от 4 до 28 В;
4)построить семейство регулировочных характеристик δ=f(Uу) для различных Qт;
5)снять регулировочную характеристику δ = f(Uу) с реальной пружиной. Определить напряжения срабатывания и отпускания ЭММ.
Оформление отчета
Отчет по выполненной работе оформляется на отдельных сброшюрованных листах А4 и должен содержать:
1)схему эксперимента;
2)таблицы с экспериментальными результатами;
3)графики по результатам эксперимента;
4)расчеты требуемых параметров;
5)заключение с анализом полученных результатов.
37
Лабораторная работа № 3
ИССЛЕДОВАНИЕ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Введение
Электрические двигатели по своему функциональному назначению можно разделить на две группы.
1.Исполнительные двигатели, которые используются для выполнения функциональных преобразований. Подводимый к ним электрический сигнал преобразуется в угловую скорость или перемещение вала.
2.Вспомогательные двигатели, в которых скорость вращения вала остается постоянной. Такие двигатели используются как источники механической энергии в различных механизмах (транспортеры, лифты и т.п.).
Требования, предъявляемые к этим двум группам двигателей, могут существенно отличаться. Ряд требований может быть общим. С точки зрения использования в системах автоматического регулирования нас будут интересовать исполнительные двигатели.
Исполнительные двигатели постоянного тока (ИДПТ) могут быть с независимым электромагнитным возбуждением (имеется обмотка возбуждения для создания магнитного поля) или с возбуждением от постоянных магнитов. Якорь двигателя выполняется различным образом. ИДПТ с барабанным якорем представляет собой классическую коллекторную машину постоянного тока [1]. Такая машина является обратимым преобразователем, т.е. может работать и как генератор, и как двигатель.
Рис. 3.1 поясняет работу простейшей коллекторной машины. На
обмотку возбуждения 1 подается постоянное напряжение UВ. Ток, протекающий по обмотке, создает магнитное поле между полюсами 2. Магнитное поле замыкается по станине 3, как показано на рисунке. Предположим, что якорь машины состоит из сердечника 7
иодной рамки 4, концы которой выведены на коллектор 5, представляющий собой два медных полукольца, закрепленных на якоре. К коллектору прикасаются неподвижные угольные щетки 6, которые обеспечивают подачу на рамку постоянного напряжения UЯ.
38

Рис. 3.1
Ток, протекающий по рамке якоря, взаимодействует с магнитным полем, создавая вращающий момент, как это показано на рис. 3.1, б. Вращающий момент зависит от положения рамки. В вертикальном положении рамки (плоскость рамки совпадает с направлением силовых линий магнитного поля) он максимален, в горизонтальном − равен нулю. Рамка, вращаясь, переходит из положения I в положение III, когда щетки переходят на противоположные полукольца коллектора, изменяя тем самым полярность приложенного к рамке напряжения UЯ (см. рис. 3.1,б). При этом изменяется направление сил, приложенных к каждому горизонтальному проводнику рамки, что позволяет сохранить направление момента (на рисунке − по часовой стрелке).
Двигатель с одной рамкой (катушкой) принципиально работоспособен, но его вращающий момент изменяется при вращении якоря от 0 до некоторого максимального значения. Поэтому в ре-
39

альном якоре имеется несколько секций, соединенных таким образом, чтобы вращающий момент создавался одновременно всеми секциями.
Управлять скоростью вращения якоря двигателя можно как по цепи возбуждения, так и по цепи якоря. Наилучшие характеристики получаются при якорном методе управления, когда входной управляющей величиной является напряжение на якоре Uя.
Уравнение, связывающее выходную величину ω (скорость вращения), нагрузочный параметр М (момент нагрузки) и входную величину Uя имеет вид:
ω=k U |
−R k2M . |
|||
д я |
|
я д |
||
В лабораторной |
работе исследуется |
|||
двигатель постоянного тока типа СД-10В. |
||||
Паспортные данные двигателя приведе- |
||||
ны в табл. 3.1, а внешний вид – на рис. 3.2. |
||||
Рис. 3.2 |
|
Таблица 3.1 |
||
Основные технические характеристики двигателя типа СД-10В |
||||
|
|
60 В |
|
|
Напряжение питания обмотки якоря |
|
|
||
Напряжение питания обмотки возбуждения |
|
27±2,7 В |
|
|
Номинальный вращающий момент |
|
3,27·10-2 Н·м |
|
|
Ток, потребляемый обмоткой якоря |
|
0,7 А |
|
|
Ток, потребляемый обмоткой возбуждения |
|
1,0 А |
|
|
Частота вращения в номинальном режиме |
|
6000±600 об/мин |
|
|
Масса |
|
0,4 кг |
|
|
Описание лабораторной установки
На рис. 3.3 изображена схема стенда для исследования исполнительного двигателя постоянного тока. На деревянной панели 6 закреплены два двигателя типа СД-10В. Двигатель 1 является исследуемым, а двигатель 3 создает нагрузочный момент.
Электрическая схема макета представлена на рис. 3.4. Обмотка якоря двигателя 3 питается от стабилизатора тока, поэтому момент нагрузки, который пропорционален величине этого тока, не будет изменяться при изменении скорости вращения. Обмотка возбужде-
40