

Исследование и разработка алгоритма внутреннего позиционирования с использованием мобильных устройств на основе МЭМС-технологии
.pdfРисунок 3.9. Векторная диаграмма определения расстояния. (  точка калибровки;
точка калибровки;  точка датчика;
точка датчика; правильный путь;
правильный путь;  путь датчика.)
путь датчика.)
3.3.4. Определение угла поворота Обнаружение угла требует использования данных гироскопа для наблюдения за
курсом, чтобы обнаруживать изменения в направлении навигации, и в основном используется,
когда пользователь поворачивается. Пороговое значение мгновенного угла поворота установим ( = 20°), согласно эмпирическому правилу. Когда абсолютное значение '
превышает , точка угла считается точкой поворота, а вышеупомянутая точка A
согласовывается с точкой калибровки поворота B (рисунок 3.10).
Согласно результатам обработки данных, нескольких прогонов, действие поворота могло появиться как данные о множественном угле поворота, потому что пользователь не сразу повернулся в следующем направлении. Чтобы уменьшить эту ошибку данных, на линейном пути, непосредственно следующем за точкой поворота, установим дополнительную точку линейной калибровки, чтобы привести результат калибровки в соответствие с реальной моделью движения. На рисунке 3.11 показано соответствие точки датчика A2 точке калибровки B2.
Рисунок 3.10. Векторная диаграмма определения угла поворота. (  точка калибровки;
точка калибровки; 
точка датчика;  путь до калибровки;
путь до калибровки;  путь после калибровки.)
путь после калибровки.)
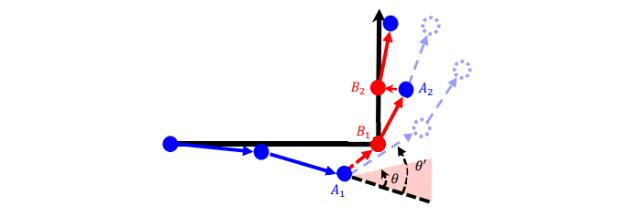
Рисунок 3.11. Векторная диаграмма калибровки после поворота. (  точка калибровки;
точка калибровки;  точка датчика;
точка датчика;  путь до калибровки;
путь до калибровки;  путь после калибровки.)
путь после калибровки.)
Вданной главе были рассмотрены методы сбора, фильтрации и последующей обработки данных от датчиков встроенной ИНС с целью построения пройденного маршрута:
расчет курса
обнаружение шага
оценка длины шага
Вэтом исследовании используются МЭМС-датчики в мобильных телефонах для сбора данных о местоположении. Например, позиционирование на основе инерциальных единиц измерения приводит к дрейфу сигнала во времени, что подрывает надежность службы позиционирования. Поэтому при проектировании внутренней системы позиционирования необходимо было учитывать калибровку ошибок, чтобы получить более точные результаты позиционирования.
Из-за распространенности ошибок распространения или нерегулярных смещений в большинстве технологий позиционирования внутри помещений в этом исследовании были реализованы известные карты помещений для калибровки позиционирования, тем самым уменьшая влияние системных ошибок на результаты позиционирования. В дополнение к применению алгоритма PDR были реализованы точки калибровки на линейных траекториях и углах.
Методы PDR-коррекции:
установка точек калибровки
определение расстояния
обнаружение азимута
определение угла поворота
Использование этих методов значительно повысит точность позиционирования PDR.
Окончательно убедится в этом сможем после экспериментальных исследований в следующей
главе.
4. Представление и анализ результатов позиционирования
В этой главе будут представлены результаты работы алгоритма PDR и PDR с
коррекцией на основе данных от встроенных в мобильное устройство датчиков инерциальной системы (ИНС).
Результаты экспериментов были разделены на:
результаты позиционирования PDR с использованием только датчиков,
встроенных в мобильный телефон (МЭМС-акселерометра и МЭМС-гироскопа);
результаты позиционирования с коррекцией PDR с использованием определения длины, азимута и угла поворота на основе помощи карты и датчиков мобильного телефона;
Соответствующие экспериментальные результаты и обсуждения представлены в следующих подразделах.
4.1. Позиционирование PDR
Результаты позиционирования PDR представляли собой результаты пути,
рассчитанные с помощью уравнений (3.1) и (3.2) с использованием данных акселерометра и гироскопа в соответствии с координатами каждого шага. Суммарная ошибка позиционирования между предполагаемой конечной точкой и известной точкой на каждом пути рассматривалась как ошибка в оценке каждого пути, а статистические данные суммарной ошибки позиционирования использовались для анализа точности эксперимента.
Было проведено двадцать экспериментальных проходов вдоль спроектированных путей на каждом из двух экспериментальных полей в этом исследовании, результаты этих испытаний представлены в таблице 4.1. Вышеупомянутая суммарная ошибка позиционирования увеличивались по мере увеличения длины пути, пройденного пешеходом.
Относительная погрешность позиционирования в результатах PDR для двух экспериментальных полей составляла примерно 1/1,5. Рисунок 4.1 иллюстрирует фактические результаты позиционирования в обоих полях, в которых пользователь начал с начальной точки в левом нижнем углу до указанных конечных точек. Первоначальные пути, определенные
PDR, значительно отличались от реальных пешеходных путей; однако в точках поворота все еще определялись особые характеристики (например, повороты и препятствия на линейных путях).
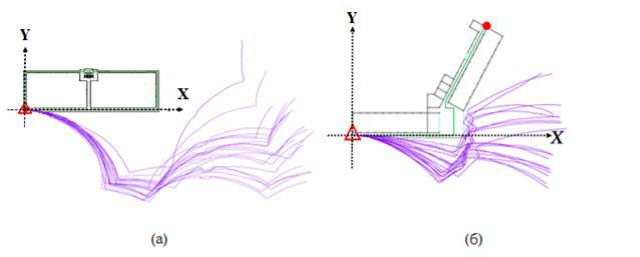
Таблица 4.1. Статистика позиционирования PDR (единица измерения: м)
|
|
Макс. |
Мин. |
Сред. |
RMSE |
Относительная погрешность |
|
|
|
|
|
|
|
|
∆ |
196.175 |
147.390 |
182.287 |
182.643 |
1/1.342 |
|
|
|
|
|
|
|
Поле1 |
∆ |
57.313 |
0.144 |
24.988 |
32.085 |
1/7.638 |
|
|
|
|
|
|
|
|
2 |
201.856 |
158.189 |
185.092 |
185.440 |
1/1.321 |
|
|
|
|
|
|
|
|
∆ |
26.834 |
14.480 |
24.067 |
24.162 |
1/3.762 |
|
|
|
|
|
|
|
Поле 2 |
∆ |
70.514 |
19.545 |
45.719 |
47.715 |
1/1.905 |
|
|
|
|
|
|
|
|
2 |
73.496 |
26.899 |
52.019 |
53.484 |
1/1.720 |
|
|
|
|
|
|
|
RMSE - среднеквадратическая ошибка
Рисунок 4.1. Результаты позиционирования PDR: а) Поле 1; б) Поле 2. ( начальная точка;
начальная точка;  конечная точка;
конечная точка;  правильное напрвление маршрута;
правильное напрвление маршрута;  путь PDR)
путь PDR)
4.2. Позиционирование PDR с коррекцией
Для повышения точности результатов позиционирования PDR была проведена коррекция PDR с использованием подхода, описанного в разделе 3.3, после чего данные наблюдений в разделе 4.1 были приняты для калибровочного эксперимента, что позволило улучшить результаты позиционирования PDR.
В таблице 4.2 показаны результаты коррекции PDR, а на рисунке 4.2 показаны скорректированные пути. Сравнение скорректированных траекторий с результатами PDR,
представленными на рисунке 4.1, показало, что скорректированные траектории имели более близкое сходство с обозначенными траекториями в эксперименте. Что касается суммарной ошибки позиционирования, они были уменьшены до 0,6 м после корректировки, это говорит о том, что контроль ошибок в пределах половины ширины проходов был успешным. Точность позиционирования улучшилась до 95% после коррекции.
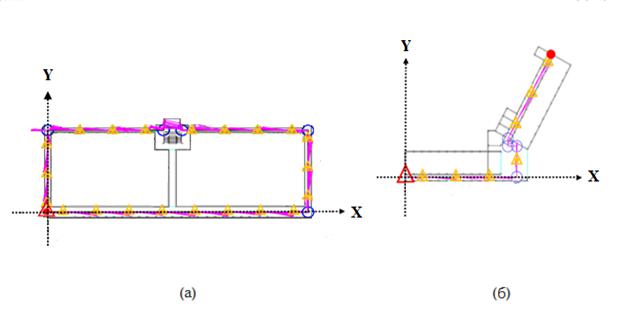
Таблица 4.2. Статистика позиционирования PDR с коррекцией (ед. измерения: м)
|
|
Макс. |
Мин. |
Сред. |
RMSE |
Относительная погрешность |
|
|
|
|
|
|
|
|
∆ |
0.162 |
0.004 |
0.086 |
0.100 |
1/2444.525 |
|
|
|
|
|
|
|
Поле1 |
∆ |
1.042 |
0.067 |
0.558 |
0.649 |
1/377.532 |
|
|
|
|
|
|
|
|
2 |
1.051 |
0.072 |
0.570 |
0.657 |
1/373.109 |
|
|
|
|
|
|
|
|
∆ |
0.621 |
0.032 |
0.244 |
0.303 |
1/299.709 |
|
|
|
|
|
|
|
Поле 2 |
∆ |
0.944 |
0.032 |
0.365 |
0.435 |
1/209.054 |
|
|
|
|
|
|
|
|
2 |
1.130 |
0.121 |
0.455 |
0.530 |
1/171.463 |
|
|
|
|
|
|
|
RMSE - среднеквадратическая ошибка
Рисунок 4.2. Результаты PDR с коррекцией: а) Поле 1; б) Поле 2. ( начальная точка;
начальная точка;
 конечная точка;
конечная точка;  линейная калибровочная точка;
линейная калибровочная точка;  угловая калибровочная точка;
угловая калибровочная точка; 
путь с PDR-коррекцией)
Для дальнейшего уточнения изменений ошибок позиционирования после калибровки была рассчитана совокупный процент прохождения ошибок в точке датчика. Процент прохождения, представляет собой долю ошибок позиционирования, которые соответствуют количеству точек данных в пределах порогового значения, к общему числу точек позиционирования, выражается как
Процент прохождения(%) = |
Количество проходов |
× 100, |
(4.1) |
|
|||
Общее количество точек |
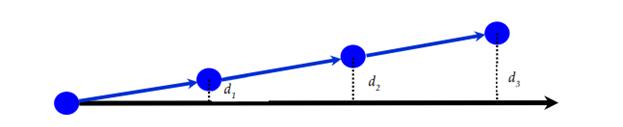
где количество проходов представляет собой точечное количество ошибок, которые попадают в пороговые значения. Ошибки представляли собой вертикальные смещения точек датчиков траектории наблюдения от фактической траектории, как показано на 1, 2 и 3 на рисунке 4.3.
Рисунок 4.3. Схема вертикального смещения. ( точка датчика;
точка датчика; правильный путь;
правильный путь;  путь датчика.)
путь датчика.)
В таблице 4.3 и на рисунке 4.4 представлены проценты прохождения исходных и скорректированных значений PDR в обоих экспериментальных полях в соответствии с различными критериями ошибок, которые показали постепенное увеличение ошибок по мере движения в экспериментальных полях. Как и говорилось ранее каждое из двух полей содержало 20 наборов экспериментальных данных, поля 1 и 2 содержали 6250 и 2421
индивидуальных данных соответственно.

Таблица 4.3. Результаты суммарного процента прохождения
Тип |
Поле |
Критерий |
Процент прохождения PDR (%) |
Процент прохождения PDR с |
|
ошибки (м) |
коррекцией (%) |
||||
|
|
|
|||
|
|
|
|
|
|
|
Поле 1 |
0.500 |
3.462 |
79.248 |
|
½ уровня стола |
|
|
|
|
|
Поле 2 |
0.500 |
10.120 |
77.860 |
||
|
|||||
|
|
|
|
|
|
1 скорректированной |
Поле 1 |
0.657 |
4.373 |
85.824 |
|
суммарной ошибки |
|
|
|
|
|
Поле 2 |
0.530 |
10.698 |
79.389 |
||
|
|
|
|
|
|
½ ширины прохода |
Поле 1 |
0.708 |
4.722 |
87.280 |
|
|
|
|
|
||
Поле 2 |
0.845 |
15.489 |
89.963 |
||
|
|||||
|
|
|
|
|
|
|
Поле 1 |
1.000 |
5.770 |
94.688 |
|
Уровень стола |
|
|
|
|
|
Поле 2 |
1.000 |
16.894 |
92.937 |
||
|
|||||
|
|
|
|
|
|
2 скорректированной |
Поле 1 |
1.314 |
7.000 |
98.272 |
|
суммарной ошибки |
|
|
|
|
|
Поле 2 |
1.060 |
17.720 |
93.846 |
||
|
|
|
|
|
|
|
Поле 1 |
1.416 |
7.561 |
98.832 |
|
Ширина прохода |
|
|
|
|
|
Поле 2 |
1.690 |
24.329 |
98.802 |
||
|
|||||
|
|
|
|
|
|
3 скорректированной |
Поле 1 |
1.971 |
9.475 |
99.968 |
|
суммарной ошибки |
|
|
|
|
|
Поле 2 |
1.590 |
23.503 |
98.430 |
||
|
|
|
|
|
|
|
Поле 1 |
2.400 |
10.295 |
100 |
|
Полное прохождение |
|
|
|
|
|
Поле 2 |
2.500 |
31.475 |
100 |
||
|
|||||
|
|
|
|
|
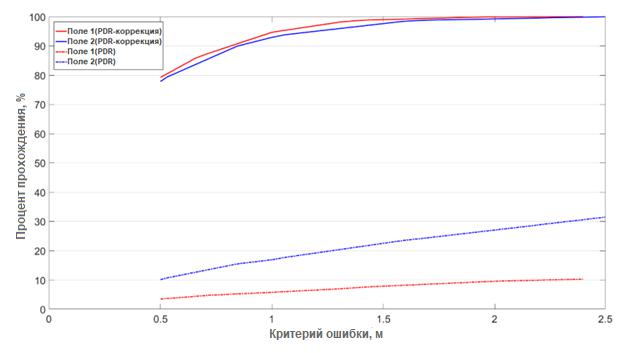
Рисунок 4.4. Критерий вертикального смещения
Скорректированная суммарная ошибка позиционирования в результатах PDR (для каждого экспериментального поля было принято разное значение точности), половина минимальной ширины прохода (в которой также различались два поля) и ошибка позиционирования в помещении на уровне стола равная 1 метру, использовались в качестве критериев ошибок. Соответственно, точность коррекции PDR поля 1 при этих критериях составляли приблизительно 86%, 87% и 95% соответственно. Исходные данные наблюдений
PDR (до калибровки) были проверены с использованием тех же критериев ошибки, и было обнаружено, что частота ошибок определения местоположения составляет всего 4%, 5% и 6%
соответственно. Значения коррекции PDR достигли 100% точности при пороговом значении
2,4 м; однако исходные значения PDR достигли только 10%. В таблице 4.3 перечислены статистические результаты процентного прохождения результатов позиционирования поля 1
при различных критериях ошибок.
Показатели точности прохождения корректирующих значений PDR поля 2 при вышеупомянутых трех критериях ошибок составляли 79%, 90% и 93% соответственно, а
показатели точности нескорректированных значений PDR составляли только 11%, 15% и 17%,
соответственно. Значения коррекции PDR достигли 100% точности при критерии ошибки 2,5
м; однако исходные значения PDR достигли только 31%. В таблице 4.3 перечислены точности позиционирования поля 2 при различных критериях ошибок. Из-за разницы между двумя полями в длине их пешеходных дорожек результаты PDR Поля 2 значительно превзошли результаты Поля 1 по точности только на PDR без коррекции (точечные линии на рисунке 4.4).
67
Испытательный путь поля 1 был в 2,7 раза длиннее, чем у поля 2. Из-за ошибок распространения и нерегулярных смещений, которые начали появляться в сигналах позиционирования PDR после увеличения расстояния ходьбы, частота ошибок позиционирования в данных поля 1 была явно ниже, чем в данных поля 2. Однако точность скорректированных данных PDR в обоих полях были почти одинаковыми (сплошные линии на рис. 4.4), а ошибки и смещения в сигналах позиционирования можно было контролировать в пределах критерия ошибок. Скорректированные сигналы PDR в поле 1 были немного более точными, чем в поле 2. Это происходит из-за множества крутых поворотов с короткими интервалами между ними в средней части траектории поля 2, а низкая точность или чувствительность датчика привела к большим ошибкам позиционирования в этих местах.
Таким образом, согласно анализу, как точности позиционирования, так и частоты ошибок, точность результатов позиционирования PDR значительно улучшилась после калибровки. Эффективность улучшения увеличивалась с увеличением расстояния ходьбы, и
было улучшено сходство характеристик датчика при отслеживании движения пользователя с схожими моделями движения.
Поскольку сигналы ГНСС покрыты и содержат несколько путей, поддержание точных результатов навигации в закрытых помещениях, таких как внутренние помещения, здания и леса, затруднено. В этом исследовании было применено персональное мобильное устройство для навигации на основе метода PDR и реализованы известные внутренние карты для калибровки и улучшения позиционирования в помещении. Благодаря принципам установки точек калибровки, предложенным в этом исследовании, система позиционирования PDR
внутри помещений, основанная на помощи с картой, может автоматически устанавливать соответствующие точки калибровки в соответствии с различными плоскостями внутри помещений и достигать высокой точности и недорогого эффекта позиционирования внутри помещений. Выводы заключаются в следующем:
1. Встроенные датчики в телефоне и PDR получали базовое количество шагов и навигационные данные для вычисления местоположения, но результаты оценки приводили к серьезным ошибкам из-за ошибок распространения и низкой точности датчиков. Траектории,
рассчитанные только с помощью датчиков, значительно отличались от фактических траекторий, а относительная погрешность составляла всего 1/1,5. Следовательно, для последующего расчета позиционирования к PDR должны быть применены условия калибровки.
2. Известные карты помещений были успешно реализованы для установки точек калибровки, которые были разделены на угловые и линейные точки калибровки. Пороговые значения и условия были установлены в соответствии с характеристиками этих точек, что
68