

Исследование и разработка алгоритма внутреннего позиционирования с использованием мобильных устройств на основе МЭМС-технологии
.pdf2.1.4. Особенности Использование ИНС включает в себя ряд особенностей, которые могут сильно
повлиять на точность позиционирования объекта в пространстве. К этим особенностям относятся:
ряд особенностей в определении характеристик отслеживаемых устройств согласно инерциальной навигационной системы;
разнообразие типов направления движения с помощью акселерометра;
своеобразное проектирование СК;
необходимость учитывать ускорение свободного падения в расчетах;
необходимость учитывать исходные входные данные с датчиков;
Исходя из выше изложенного в инерциальные навигационные системы должны быть
использованы следующие компоненты и устройства [30]:
для того, чтобы определить ускорение движения отслеживаемого устройства,
необходимо использовать триаду акселерометров (x, y, z);
для того, чтобы определить угловую скорость для ориентации в пространстве,
необходимо воспользоваться триадой гироскопов (x, y, z);
для того, чтобы определить входные (исходные) данные, необходимо воспользоваться, например, датчиками, встроенными в кристалле микросхемы самого отслеживаемого устройства (планшета, мобильного телефона, карманного персонального компьютера (КПК) и т.д.);
для фильтрации и обработки входных данных необходимо использовать либо специализированные устройства, либо использовать алгоритмы для решения этой проблемы
иинтегрировать его в приложение, которое можно использовать с отслеживаемого устройства, например, мобильного телефона;
для того, чтобы отобразить отфильтрованные данные и предоставить их пользователю или проектировщику, можно воспользоваться либо персональным компьютером, либо написать приложение для отслеживаемого устройства, которое позволяет вывод данных;
самым главным аспектом озвученного ранее алгоритма является использование методов коррекции, например, таких, как, калибровочные точки и т.п. [31,32].
2.1.5. Метод счисления пути пешехода
PDR (с англ. pedestrian dead reckoning, счисление пути пешехода, СПП) — это метод
относительного позиционирования, который использует данные инерциального
измерительного блока (ИИБ) для расчета местоположения объекта. Под инерциальным измерительным блоком (ИИБ) понимают устройство, специализируемое на определении линейного и углового ускорения, а также ориентации устройства или объекта в пространстве с помощью инерциальных датчиков (гироскоп и акселерометр). По сравнению с другими беспроводными системами позиционирования, PDR проста в эксплуатации и недорога для обычных пользователей, поскольку не требует дополнительного оборудования.
Однако результаты PDR, оцененные по данным ИИБ, со временем накапливали ошибки. В связи с этим разные исследователи предложили различные методы исправления ошибок позиционирования PDR, в том числе исправление путем объединения других датчиков и беспроводных устройств [33,34], а также усовершенствования алгоритмов для оценки направления движения и длины шага [35–40]. Кроме того, также была предложена концепция точек калибровки [41,42].
Ошибки позиционирования PDR с течением времени можно исправить с помощью точек калибровки с известными координатами. Однако правила настройки точек калибровки в приведенных выше исследованиях не указаны. Если уделить основное внимание правилам установки точки калибровки и результатам коррекции PDR, то можно значительно повысить точность позиционирования PDR.
2.2. Зависимость погрешности микроэлектромеханических систем в навигации.
При анализе параметров системы измерения движения, спроектированной на базе микроэлектромеханических систем (МЭМС), нужно иметь представление, как эта система устроена, чтобы иметь возможность использовать ее для разработки алгоритма внутреннего позиционирования. Самое главное для проектирования или моделирования инерциальной навигационной системы следует определить характеристики движения объекта в пространстве, а также параметры ИНС.
Датчики на базе микроэлектромеханической системы зачастую находятся в портативных устройствах, которые находятся в постоянном движении (смартфоны, планшеты.
карманные персональные компьютеры (КПК) и т.п.), то есть входные данные с датчиков берутся в связанной системе координат. В этом случае нужно перейти в инерциальную систему координат. Для того чтобы это осуществить необходимо воспользоваться матрицей перехода B:
s̅̅̅ = B ∙ s̅ ,
L
где s̅– вектор, с помощью которого определяются характеристики системы; K и L –
значения проекции элементов s в инерциальной (ИСК) и связанной системе координат (ССК).
Компоненты матрицы перехода aij могут быть углами Эйлера, компонентами кватерниона и т.д. Для нахождения углов ф(φ, v, ) необходимо вычислить интеграл от f(w̅ ), поворота связанной СК:
tk |
tk |
фn = ∫ |
f(w̅ )dt + ∫ δ(w̅k)dt, |
tk−1 |
tk−1 |
Где f(w̅ )- угловая скорость; δ(w̅k) – значение погрешности угловой скорости f(w̅ ) поворота ССК, tk tk−1 + ∆t, t0 = 0.
Для того, чтобы определить координаты и скорость отслеживаемого устройства
относительно ИСК необходимо воспользоваться формулами:
|
|
̅ |
̅ |
|
tk |
|
tk |
̅ |
|
|
|
|
|
|
|
+ ∫ |
|
̅ |
|
|
|
|
|
|
|||
|
|
Vk = Vk−1 |
|
Jkdt + ∫ |
δ(Jk, фk)dt, |
|
|
||||||
|
|
|
|
tk−1 |
tk−1 |
|
|
|
|
|
|||
|
|
|
tk |
|
|
tk |
|
|
tk |
|
|
|
|
|
|
|
̅ |
|
|
̅ |
|
̅ |
|
|
|||
|
|
r̅ = r̅ |
+ ∫ |
|
dt + J |
|
|
)dt, |
|||||
|
|
V |
|
k |
dt + δ(J |
k |
, ф |
k |
|||||
|
|
k k−1 |
|
k−1 |
|
|
|
|
|
||||
|
|
|
tk−1 |
|
tk−1 |
|
|
tk−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
̅ |
– скорость |
движения |
|
отслеживаемого устройства; r̅ – координаты |
||||||||
V |
|
||||||||||||
|
k |
|
|
|
|
|
|
|
|
|
|
|
k |
отслеживаемого устройства; Jk̅ – является проекцией вектора ускорения в ИСК; δ(Jk̅, фk) –
погрешность, необходимая для определения основных характеристик движения объект в
̅ |
и r̅– входные исходные параметры с датчиков (акселерометр, гироскоп) во |
||||
пространстве; V |
|||||
0 |
0 |
|
|
|
|
время t0. |
|
|
|
|
|
Исходя из того, что с течением времени ошибки позиционирования суммируются, то |
|||||
суммарные ошибки рассчитываются по формулам: |
|
|
|
||
|
k |
tk |
|
|
|
|
̅ |
|
|
|
|
|
̅ |
|
|
(2.6) |
|
|
δ(Vk) = ∑ ∫ δ(Jk, фk)dt , |
||||
|
1 |
tk−1 |
|
|
|
|
k |
tk |
|
|
|
|
δ(r̅) = ∑ δ(J̅, ф |
k |
)dt. |
(2.7) |
|
|
k |
k |
|
|
|
|
1 |
tk−1 |
|
|
|
Исходя из выше представленных формул, можно сделать вывод, что суммарная ошибка позиционирования постепенно возрастает на протяжении всего времени отслеживания положения объекта, это говорит о том, что нужно каким-то способом корректировать входные данные с датчиков на базе микроэлектромеханических системах для устранения накопления ошибки до критических значений. Чем больше периоды коррекции входных данных, тем меньше точность позиционирования объекта в пространстве. Для того, чтобы определить период коррекции необходимо выяснить ряд внешних параметров таких как частота сбора данных, возможности технического устройства и т.д.
2.3. Исследование проблемы смещения и дрейфа нуля датчиков на базе МЭМС Все ИНС обладают проблемой смещения и дрейфа нуля чувствительных элементов
системы датчиков: с течением времени, изначально маленькие погрешности интегрируются во все большие и большие погрешности, что приводит колоссальной ошибке позиционирования в пространстве.
В инерциальных навигационных системах последующее положение объекта определяется на основе данных об предыдущем положении и данных с датчиков (гироскоп,
акселерометр), в результате ошибка позиционирования растет пропорционально изменению времени, прошедшему с момента ввода исходного положения. Даже самые лучшие акселерометры со стандартной погрешностью в 10 мкг накапливали 50-метровую ошибку за
17 минут. Таким образом, положение должно периодически корректироваться с помощью данных от какой-либо другой навигационной системы или использовать методы коррекции.
2.3.1. Особенности смещения нуля МЭМС-гироскопа Датчики на базе микроэлектромеханические систем очень чувствительны к перепадам
температур, что влияет на их параметры, и обладают достаточно сложной структурой,
состоящей 3-х слоев. Зависимость изменения параметров датчиков обуславливаются тем, что в МЭМС наблюдаются перемещения, регистрируемые в пределах нанометра при том, что интервалы расположения конденсаторов в микроэлектромеханических системах составляют от двух до трех микрометров. Использование способов на основе дифференциального счисления при таких микроскопических масштабах и при всей сложности структуры МЭМС не дает возможности предотвратить наблюдаемый дрейф в системе.
Зависимостью от изменения температуры обладает не только сами МЭМС, но и технические, электрические приборы, которые служат для приема данных с гироскопа и непосредственно отвечают за его управление. Стоит отметить температурный градиент,

который также играет немаловажную роль в искажении входных данных из-за колебаний в системе [18].
Например, температурный датчик в микроэлектромеханических системах располагается в кристалле микросхемы. Микросхема находится на самом дне корпуса выполненного из металлокерамики, которая является хорошим теплопроводящим металлом. Таким образом исполняется тепловая связь между МЭМС, находящимся в капсуле, и микросхемой. После включения микросхемы она будет выбрасывать намного больше тепла чем, элементы МЭМС, значит показания температуры датчика будут равны значениям температуры кристалла в начальный момент времени.
Всвоей работе Евстафьев С.Д., Ракитянский О.И., Северов Л.А., Семенов А.А. писали, что «эти изменения приводят к отклонению значений собственных частот колебаний чувствительных элементов».6 Это говорит о том, что датчики на базе МЭМС имею погрешности, которые зависят от изменений температуры, сильнее всего это проявляется вначале работы.
Всвоей работе Веремеенко К.К., Галай И.А. писали, что «смещение (и как частное проявление, дрейф нуля) нуля – одна из основных калибруемых погрешностей блоков датчиков наряду с неортогональностью и нелинейностью масштабного коэффициента и зависимостью от перегрузки»7.
Дрейф нуля для датчика на базе МЭМС - это изменение выходных данных датчика относительно его значений находящегося в состоянии покоя. Эта погрешность может носить случайный и систематический характер, в большинстве случаев при смещении нуля гироскопа рассматривают именно общий случай, который будет описан ниже [21]. Под систематическими характером дрейфа нуля гироскопа подразумевается зависимость отклонения выходного параметра, например, изменения температуры, от начального (нулевого) значения в состоянии покоя.
Под случайным характером дрейфа нуля подразумевается скачек температуры после включения, что обуславливается нагревом кристалла микросхемы, где расположен датчик на базе МЭМС. Под общим характером дрейфа нуля гироскопа подразумевается отклонение выходных параметров датчика от времени, которое возникает в результате внешних и внутренних факторов, воздействующих на показания датчика.
6Евстафьев С.Д., Ракитянский О.И., Северов Л.А., Семенов А.А. Калибровка информационных характеристик микромеханического гироскопа // Известия Тульского государственного университета. Технические науки. 2012. № 7. С. 167 - 172
7Веремеенко К.К., Галай И.А. Разработка алгоритма калибровки инерциальной навигационной системы на двухосном испытательном стенде // Труды МАИ. 2013.

Из-за изменения температуры возникает перемена давления вакуума внутри оболочки, где расположена микроэлектромеханическая система, что является основной причиной появления смещения нуля датчиков [22]. Кроме того, можно отметить деформацию конденсаторов, состоящих из кремневой оболочки, из-за температурного дрейфа [23].
2.3.2. Способы устранения дрейфа нуля
Вбольшинстве иностранных статей и учебников в качестве решения устранения дрейфа нуля приводят вариант фильтрации данных датчиков с помощью фильтра Калмана, результаты их исследований вполне удовлетворяют нашим требованиям, но при всем при этом нюансы его использования не представлены в исследованиях их авторов, что побудило к дальнейшим исследованиям в этой области [25,26].
Всвоей работе Ломакин М.А. писал, что «популярным способом устранения температурного дрейфа является применение полинома с коэффициентами, вычисляемыми по методу наименьших квадратов»8. Если довериться большому количеству источников, то этот метод достаточно прост и удобен в отношении расчетов [27,28]. Но использование данного способа не рекомендуется в том случае, если исследуемый полином имеет большое количество точек перегиба, что требует использования полинома высокой степени, например, третей или четвертой, что очень сильно усложняет расчеты, т.к. нашем исследовании нам предстоит обработать большое количество входных данных это не желательно [27,29]. Однако этот способ на сегодняшний день является один из самых простых и эффективных.
Счисление пути пешехода (PDR) — это метод относительного позиционирования, который использует данные инерциального измерительного блока для расчета местоположения объекта. Под инерциальным измерительным блоком (ИИБ) понимают устройство, специализируемое на определении линейного и углового ускорения, а также ориентации устройства или объекта в пространстве с помощью инерциальных датчиков (гироскоп и акселерометр). По сравнению с другими беспроводными системами позиционирования, PDR проста в эксплуатации и недорога для обычных пользователей, поскольку не требует дополнительного оборудования. Исходя из выше изложенного этот метод будет взят за основу разработки алгоритма внутреннего позиционирования в данной научно-исследовательской работе.
Серьезным недостатком инерциальной навигационной системы является то, что на
протяжении всего времени отслеживания положения объекта в пространстве, данные с
8 Ломакин М.А. Особенности построения модели погрешности микроэлектромеханических датчиков при решении навигационной задачи // Инженерный вестник Дона. 2014. № 2 (29). С. 84.
датчиков постепенно увеличивают ошибку позиционирования. Для того чтобы решить эти проблему необходимо усовершенствовать алгоритм для оценки направления движения и длины шага пешехода, использовать фильтры для устранения шумов и сглаживания входных данных датчиков, проведение регрессионного анализа входных данных для расчета степени дрейфа в гироскопе, эти данные позволят выбрать необходимый диапазон и количество угловых и линейных калибровочных точек для корректировки положения объекта с помощью карты местности, что существенно увеличит точность позиционирования в помещении.
В результате написания второй главы данной научно-исследовательской работы ставится ряд задач для дальнейшего исследования и решения:
проведение аналитического обзора литературы, затрагивающей технические проблемы данной научно-исследовательской работы;
исследование общей структуры к использованию МЭМС-технологии в системах внутреннего позиционирования, а именно в инерциальных навигационных системах (ИНС);
анализ особенностей, преимуществ и недостатков инерциальных навигационных систем, а также анализ уже существующих методов и алгоритмов для решения проблем позиционирования;
представление подхода с использованием ИНС мобильного устройства на базе МЭМС-технологии для позиционирования в пространстве;
анализ всевозможных способов устранения возникающих ошибок позиционирования с использованием инерциальных навигационных систем;
анализ методов обработки данных от встроенных датчиков (МЭМС) для построения траектории пройденного пути;
разработка алгоритма автономной навигации в замкнутом пространстве на основе ранее исследуемых методов обработки данных;
представление результатов эксперимента (построение траектории пройденного пути, сравнительный анализ точности позиционирования);
3.Методы обработки данных от встроенных датчиков мобильного устройства
Вданной главе рассмотрим методы сбора, фильтрации и последующей обработки данных от датчиков встроенной ИНС с целью построения пройденного маршрута, а также выделим их достоинства и недостатки.
Вприменении к рассматриваемой работе целесообразно использовать алгоритм PDR.
Для улучшения данного алгоритма необходимо использовать известные карты помещений для калибровки позиционирования, тем самым уменьшая влияние системных ошибок на результаты позиционирования. В дополнение к применению алгоритма PDR будут реализованы точки калибровки на линейных траекториях и углах, используя определения расстояния, азимута и угла поворота.
3.1. Материалы и методы
В эксперименте будем использовать телефон на базе Android, Redmi Pro, в котором будут использоваться два вида датчиков: гироскоп и акселерометр. Данные этих датчиков можно использовать для расчета курса и обнаружения шагов соответственно (рисунок 3.1).
Результаты для Redmi Pro будут теоретическим экспериментом по обсуждению результатов
PDR, т.к. в разных датчиках мобильных телефонов разные дрейфы и смещения.
Экспериментальным путем необходимо получить константу ошибки датчиков в разных моделях мобильных телефонов. Однако принцип позиционирования последовательный, и
соответствующие методы, предложенные в этом экспериментальном исследовании, могут быть применимы.
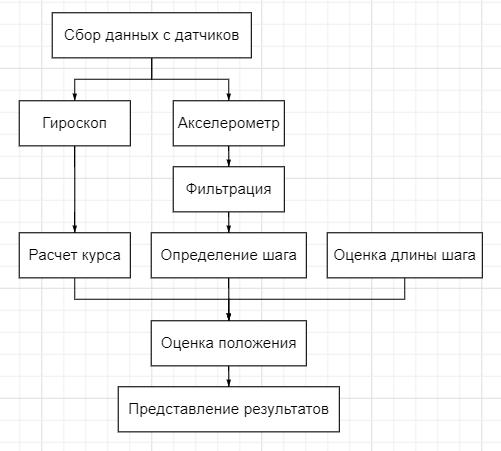
Рисунок 3.1. Структурная схема алгоритма метода счисления пути пешехода (PDR)
В таблице 3.1 перечислены характеристики экспериментального мобильного телефона.
Для экспорта данных с датчиков используется приложение Andro Sensor. Данные датчика передаются на компьютер через мобильное устройство или по электронной почте для расчета.
Затем Matlab используется для интеграции системы компиляции алгоритмов через интерфейс с AutoCAD, тем самым иллюстрируются результаты эксперимента. Другими словами, сбор данных датчиков и компиляция алгоритма PDR выполняется с помощью программ Andro
Sensor и Matlab соответственно. Благодаря программному пакету Matlab окончательные результаты позиционирования PDR необходимо экспортировать с помощью библиотеки
ActiveX в AutoCAD для дальнейшего представления результатов экспериментов.
Таблица 3.1. Технические характеристики смартфона, используемого для получения данных.
Модель |
Система |
|
Процессор |
|
Датчики |
Redmi |
Android |
|
MediaTek MT6797M |
МЭМС-акселерометр, МЭМС-гироскоп |
|
|
64-битный 10-ти |
||||
Pro |
6.0 |
|
|
и др. |
|
|
ядерный |
|
|||
|
|
|
|
|
|
PDR, |
технология |
относительного позиционирования, |
оценивает положение |
||
пользователей снаружи или внутри помещений путем измерения расстояний и направлений
перемещения от начальных положений пользователей с помощью инерциальных датчиков,
которые выражаются следующим образом:
̂ |
, |
(3.1) |
Xt = Xt−1 + ŝ[t−1,t]sinθ[t−1,t] |
||
̂ |
, |
(3.2.) |
Yt = Yt−1 + ŝ[t−1,t]cosθ[t−1,t] |
где (Xt, Yt) и (Xt−1, Yt−1) представляют собой координаты в момент времени t и (t − 1) соответственно; ŝ[t−1,t] представляет собой расстояние перемещения от (t − 1) до t, которое в
данном исследовании определено как длина шага пользователя; и ̂[t−1,t] указывает
θ
направление движения пользователя в точке (t−1).
PDR обычно включает в себя три этапа, а именно расчет курса, обнаружение шага и оценку длины шага (рисунок 3.1), все из которых подробно описаны в этом подразделе.
3.1.1. Расчет курса В этом подразделе поговорим о определении направления движения устройства и его
пользователя. Чтобы упростить входные данные с датчиков, пользователя попросили прикрепить устройство к груди для согласованности направления.
Расчет курса обычно включает использование данных гироскопа и магнитометра или их комбинированного алгоритма. В этом исследовании будем использовать данные гироскопа только из-за технических характеристик телефона. Данные гироскопа используются для расчета угла курса во время движения пользователя, который совместно с результатами обнаружения шагов применялся для расчета координат пользователя. Уравнение курсового угла
|
|
|
= |
̂ |
|
, |
|
(3.3) |
|
|
|
+ θ |
[t−1,t] |
|
|||||
|
|
|
−1 |
|
|
|
|
|
|
где и |
|
представляют углы курса при t и (t |
− 1) соответственно, а |
̂ |
|
||||
−1 |
θ |
[t−1,t] |
|||||||
|
|
|
|
|
|
|
|
||
представляет собой угол поворота от (t – 1) к t. |
|
|
|
|
|
|
|||
Рисунок 3.2 иллюстрирует расчет курсового угла, где сплошные линии относятся к |
|||||||||
траекториям движения; пунктирные линии относятся к касательным направлениям
предыдущих траекторий; |
, |
и |
представляют положения P при (t - 1), t и (t + 1), |
|
|
−1 |
|
+1 |
|
̂ |
̂ |
|
|
|
соответственно; θ[t−1,t] |
и θ[t,t+1] представляют углы поворота от (t-1) до t и от t до (t + 1) |
|||
соответственно; и курсовой угол от (t-1) до (t + 1) может быть выражен как [t−1,t+1] =