

Исследование и разработка алгоритма внутреннего позиционирования с использованием мобильных устройств на основе МЭМС-технологии
.pdfнебольшие по объему, легкие и энергоэффективные, и они применяются в автомобилях, для внутреннего позиционирования и навигации, а также в других промышленных приложениях.
В своей докторской диссертации Абдель-Хамид У. писал, что «МЭМС можно использовать для разработки небольших, недорогих и энергоэффективных навигационных систем»5.
Сегодня большинство мобильных телефонов содержат датчики инерциальных измерительных блоков (ИИБ), такие как акселерометры МЭМС, магнитометры и гироскопы.
Эти датчики, изначально предназначенные для ориентации экрана (автоматического поворота) или подсчета темпов, также могут успешно применяться для позиционирования.
В следующей главе рассмотрим, что из себя представляет инерциальная навигационная система, с какими проблемами придется столкнуться и проведем литературный обзор уже представленных решений проблем. В результате чего сформируем список задач необходимых и достаточных для решения поставленных проблем для дальнейшей разработки алгоритма внутреннего позиционирования.
5 Абдель-Хамид, У. Повышение точности интегрированных систем MEMS-IMU /GPS для наземных транспортных навигационных приложений. Докторская диссертация, Университет Калгари, Калгари, AB, Канада, 2004.

2.Исследование и анализ инерциальной навигации с использованием МЭМС-
технологии В главе рассмотрена общая структура к использованию МЭМС-технологии в системах
внутреннего позиционирования, а именно в инерциальной навигационной системе.
Рассмотрены особенности, плюсы и минусы инерциальной навигационной системы, а также проведено исследование существующих подходов для решения проблем точности позиционирования.
2.1. Инерциальная навигационная система Под инерциальной навигацией (ИН) подразумевается способ нахождения положения в
пространстве отслеживаемого устройства (мобильный телефон, планшет, карманный персональный компьютер (КПК) и т.д.) или объекта (наземные, воздушные, водные транспортные средства и т.д.), основанный на принципе инерциального взаимодействия тел.
Проще говоря, под ИН подразумевается определение характеристик перемещения устройства или объекта в пространстве. К этим характеристикам относятся: линейное и угловое ускорение, изменение скорости и местоположения в рассматриваемой системе координат
(СК). Все эти данные снимаются при помощи инерциальных датчиков (гироскоп,
акселерометр) и на их основе решаются задачи позиционирования в замкнутых пространствах.
В качестве чувствительных компонентов подобных датчиков применяются так называемые подвижные массы. Находясь под инерциальным воздействием подобные массы совершают незначительные перемещения из-за изменения характеристик положения объекта в пространстве, которые в свою очередь фиксируются, а затем преобразуются в привычные нам показания датчиков.
Под ускорением подразумевают векторную величину, имеющую заданное направление и числовое значение. Значит, для того, чтобы определить значения ускорения необходимо знать оба этих параметра. Как говорилось ранее, датчиками, применяемыми в ИНС, являются акселерометры и гироскопы. С помощью акселерометров определяют значения ускорения в рассматриваемый отрезок времени. С помощью гироскопов определяют значения углового ускорения, в результате чего определяется ориентация в пространстве.
Стоит отметить, что при измерении ускорения, например, самолета необходимо учитывать влияние сил земного притяжения. Для того чтобы компенсировать влияние гравитационного поля земли, нужно ввести опорную СК, с помощью которой можно будет определить данные о положении акселерометра в рассматриваемый момент времени. Если говорить о классических инерциальных навигационных системах, то осуществление алгоритма компенсации, описанного выше, осуществлялось за счет установки датчиков на
стабилизированной платформе в универсальной шарнирной опоре. Благодаря такому решению удалось отгородить показания датчиков от маневров самолета, что позволяет оставлять без изменений положение акселерометра относительного поверхности земли в результате перемещения в пространстве.
Если говорить про современные инерциальные навигационные системы, то с ростом миниатюризации электроники и появления микроэлектромеханических компонентов, все чаще стали использоваться, так называемые бесплатформенные инерциальные навигационные системы (БИНС). В подобных системах датчики (гироскоп и акселерометр) крепко закреплены с корпусом объекта. Данные полученные с датчиков передаются на вычислительное устройство, которое определяет ориентацию акселерометров в опорной СК, после чего компенсируется влияние земного притяжения за счет формирования определенных сигналов.
Из-за того, что в конструкции бесплатформенных инерциальных навигационных системах нет вращающихся частей и данные с датчиков обрабатываются с помощью вычислительных устройств с использованием программных пакетов, такие системы дешевле и проще по своему устройству, чем классические инерциальные системы.
Главным плюсом инерциальной навигационной системы это ее автономность.
Возможность функционирования ИНС не зависит от погодных условий или электромагнитных излучений и не нуждается в наличии внешних сигналов связи. Хоть инерциальная навигационная система и является локальной системой позиционирования, но она не требует наличия отдельного канала связи, как в большинстве других системах подобного типа. Серьезным минусом инерциальной навигационной системы является то, что на протяжении всего времени отслеживания положения объекта в пространстве, данные с датчиков постепенно увеличивают ошибку позиционирования.
Для инерциальных навигационных систем свойственно регулирование по положению в пространстве и ориентации относительно заданной линии. Местоположение в пространстве можно установить, используя акселерометры для нахождения вектора положения относительно азимута, а с помощью гироскопа определяют ориентацию в пространстве,
исходя из вращения земли вокруг своей оси, в результате чего находятся векторы направления осей опорной СК. Весь выше перечисленный процесс принято называть выставкой начальных параметров инерциальной навигационной системы. Главным условием для выполнения установки изначальных данных о местоположении в пространстве - это необходимость сохранить объект или устройство в неподвижном состоянии во время выполнения процесса.
Инерциальная СК во время выставки начальных параметров проходит через процесс автоматической настройки, в результате которой выравнивается вертикальная ось локальной СК, исходя из полученных данных о ускорении, и вычисляется скорость вращения земли
вокруг своей оси для нахождения азимута. Что касается того, когда изначальное местоположение рассматриваемого устройства/объекта в пространстве заранее известно каким-либо другим способом и выходные данные гироскопа имеют маленькие погрешности,
то этих данных вполне хватит для отслеживания объекта в пространстве.
Стоит отметить, что далеко не всегда исходное положение объекта известно, а
показания гироскопа зачастую искажены и имеют высокий процент погрешности,
акселерометры и гироскопы постепенно увеличивают ошибку позиционирования из-за смещений и дрейфов относительно значений выставки начальных параметров, также показания датчиков (акселерометр, гироскоп) подвержены ошибкам линейного и углового ускорения, ошибкам масштабного коэффициента. Самой значительной погрешностью в инерциальных навигационных системах является смещение значений гироскопа относительно нулевых значений.
На протяжении всего времени отслеживания положения объекта в пространстве,
данные с датчиков постепенно увеличивают ошибку позиционирования это связано с тем, что при работе инерциальной навигационной системы все получаемые данные с датчиков интегрируются вместе с погрешностями. Если говорить про скорость передвижения, то она определяется путем интегрирования значений ускорения, получаемого с акселерометра, и тем самым является следствием непрекращающегося увеличения ошибки скорости.
Основными ошибками гироскопа являются ошибки ориентации в пространстве
(ускорение силы тяжести, угловое ускорение) при постоянном интегрировании этих значения,
как в случае с акселерометром, приводит к увеличению погрешностей.
Если отказаться от использования методов фильтрации данных с датчиков инерциальной навигационной системы, то это может привести к серьезным ошибкам позиционирования. Одним из предложенных вариантов коррекции входных данных с датчиков основан на фильтрации показаний акселерометра и гироскопа, можно сказать в прямом эфире, отправляя показания корректирующих значений на устройство вычисления, в
котором определяются параметры смещения и дрейфа гироскопа. Что касается акселерометров, то благодаря их показаниям можно получить показания о местоположении устройства/объекта в пространстве на основе данных относительно гравитации земли.
Главная обязанность акселерометров в определении курсвертикалей состоит в предоставлении показаний о местоположении устройства/объекта в пространстве в начальный момент времени и дальнейшей коррекции местоположения, благодаря нейтрализации дрейфа нуля гироскопа в течение пространственного перемещения.
В настоящее время существуют различные виды курсовертикалей. В системах с высокой точностью применяются оптико-волоконные или лазерные гироскопы. Высокие
требования к таким системам обуславливаются тем, что применяются в режимах автопилота
ввоздушной навигации, где точность очень сильно важна, чтобы, например, избежать касания крыльев самолета, в период посадки и взлета самолета, с землей, это практически незаменимо
вусловиях плохой или ограниченной видимости.
Если говорить про курсвертикали более низкого класса, то они не имеют такой высокой точности как в предыдущем примере, и применяются зачастую в качестве резервной или второстепенной системы позиционирования. В подобных случаях также применяются гироскопы на базе микроэлектромеханических систем схожего класса точности позиционирования.
На основе выше изложенного можно сделать вывод, что, благодаря инерциальным навигационным системам, представляется возможность полностью автономно обнаруживать и отслеживать положение и ориентацию устройства или объекта в пространстве без использования данных ГНСС, ССН и др. При использовании в такой системе позиционирования миниатюрных датчиков, выполненных на базе микроэлектромеханической системы (МЭМС), позволяет при сохранении, а даже увеличении надежности, снизить стоимость, массу и размеры по сравнению с классическими ИНС использующими достаточно габаритные механические элементы. Помимо этого, датчики на базе микроэлектромеханическиой системы в большинстве ситуаций могут эксплуатироваться в более суровых условиях, что является следствием возможности обширного диапазона использования инерциальных навигационных систем, например, в приложениях мобильного телефона для определения положения в пространстве, что до не давнего времени было не реализуемо.
2.1.1. Принцип работы Для начала необходимо сформировать представление, что такое навигация. В
различных источниках определения могут отличаться [56,57]. Навигация – это определение положения в пространстве, скоростных характеристик и направления отслеживаемого устройства или объекта относительно инерциальной системы координат (ИСК). Что касается определения инерциальной навигации, то будем считать, что это нахождение и последующее интегрирование значений углового ускорения и скорости отслеживаемого устройства или объекта в пространстве. Под термином инерциальная навигационная система будем понимать,
как систему, которая непосредственно выполняет функцию интегрирования входных данный с инерциальных датчиков системы.
Под результатами функционирования инерциальной навигационной системы подразумевается определении вектора в одной из нескольких систем координат, также
определении ориентации и скорости движения отслеживаемого устройства в исследуемой системе координат. Различают всего пару систем координат:
географическая pp система координат;
геоцентрическая pe система координат.
Скорость – в виде вектора в географическом сопровождающем трехграннике n,
направление осей вверх, вправо и вниз, относительно нормали к горизонту.
Инерциальные навигационные системы зачастую классифицируют по точности позиционирования [59]. Точность позиционирования инерциальной навигационной системы зависит от класса точности используемых датчиков, определяющих линейное и угловое ускорения, а также скорости и координаты отслеживаемого устройства или объекта.
Обычно для автономной навигации в инерциальных навигационных системах используются акселерометры и гироскопы наивысшей точности. Они используются в авиации, на наземных и морских транспортных средствах, где автономная навигация действительна необходима. Если говорить по поводу датчиков низко-среднего классов точности, то здесь ошибки позиционирования очень велики, что говорит о том, что без использования внешней коррекции навигация в пространстве попросту невозможна или нерелевантна.
В настоящее время практически в каждом мобильном устройстве есть бесплатформенная инерциальная навигационная система (БИНС), в которой расположено от двух и более датчиков (гироскоп и акселерометр и др.), которые используются для определения ориентации экрана и калибровки экрана. В обычной инерциальной навигационной системе датчики зафиксированы так, чтобы находиться всегда в правильной ориентации (рис. 2.1). Основным плюсом бесплатформенной инерциальной системы – это ее крошечные размеры по сравнению с обычной инерциальной навигационной системой с использованием громоздких механических элементов.
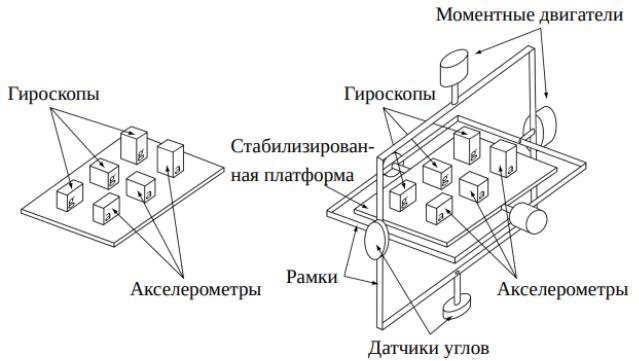
Рисунок 2.1. Слева – БИНС, справа – классическая платформенная версия инерциальной навигационной системы.
2.1.2. Математическая модель работы Для того чтобы решить уравнения инерциальной навигационной системы для начала
необходимо определить входные параметры системы такие как исходное положение,
ориентация в пространстве и скорость. В дальнейшем при поступлении новых входных данных с датчиков слежения (акселерометр и гироскоп) инерциальной навигационной системы, данные корректируются. Если говорить о ИНС на основе микроэлектромеханических систем, то чаще всего применяется м. Л. Эйлера, который основывается на том, что выходные параметры датчиков: акселерометра и гироскопа постоянны в течение всего времени выполнения структурно-параметрической идентификации, что называется семплированием данных ∆ между значениями − 1 и ,
где . Что касается точных инерциальных навигационных систем, например, которые используются в авиации, хорошим решением будет применить методы с использованием м. Л.
Эйлера более высокого порядка [56].
Полученные значения угловой скорости можно использовать для расчета значений изменения ориентации в пространстве за период ∆t, после чего применить эти значения для определения угла поворота. Для того, чтобы избавиться или хотя бы немного сократить погрешность линеаризации и уменьшить значения углов поворота, необходимо выполнить структурно-параметрическую идентификацию (семплирование) данных гироскопа с частотой не менее 50 герц. Тогда значение матрицы R:
|
≈ |
( + [ ∙ ∆ ] |
× |
), |
(2.1) |
+1 |
|
|
|
|
где E – квадратная матрица размера три на три в нулевой степени, × – оператор,
определяющий получение из вектора угловой скорости, кососимметричной матрицы, ω –
является значением вектора углового ускорения. Если вы имеете дело с летательными аппаратами с высокой скоростью перемещения в пространстве, такие как самолеты, при малой частоте обновления данных необходимо применить формулу поворота Олинда Родрига [65],
которая представлена ниже:
|
= |
( + + (1 − ) 2), |
(2.2) |
+1 |
|
|
|
где θ = ||ω · ∆t||, а K – кососимметричная матрица, которую получаем из ω · ∆t/θ.
Чтобы определить линейное ускорение отслеживаемого объекта или устройства,
необходимо прибавить к кажущемуся ускорению составляющую ускорения свободного падения g:
|
|
|
|
|
= |
|
+ |
|
|
, |
(2.3) |
|
|
|
|
|
|
|
|
|
̂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где – линейное ускорение объекта в приборном трехграннике, |
– измерения |
|||||||||||
акселерометра, |
̂ |
|
– значение матрицы |
вращения от сопровождающего |
трехгранника к |
|||||||
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
значениям датчиков слежения, – значение инерции в сопровождающем трехграннике.
Исходя из выше изложенного, можно сделать вывод, что малейшие погрешности в определении направления в пространстве приводят к грубым ошибкам показаний датчиков инерциальной навигационной системы. Структурная схема работы инерциальной навигационной системы изображена на рис.2.2.
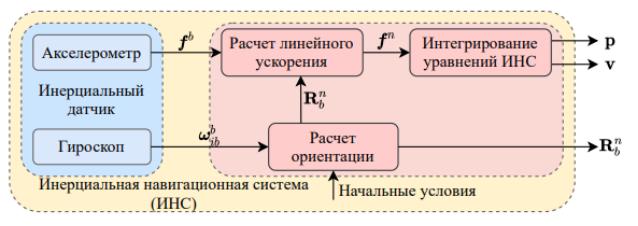
Рисунок 2.2. Структурная схема работы инерциальной навигационной системы.
Алгоритмы позиционирования инерциальной навигационной системы никак не воздействуют на способы перемещения отслеживаемого устройства или объекта в пространстве. Из-за этого приходится расплачиваться постоянным увеличением ошибки позиционирования в результате всего времени отслеживания [66].
При использовании инерциальных навигационных систем все сводится к определению номинального состояния объекта. Уравнение номинального состояния объекта позиционирования представлена в виде вектора [56,59]:
̂ |
= [ , , ] , |
(2.4) |
|
|
|
где ̂ – вектор номинального состояния, – значение позиции, – значение скорости,
– значение ориентации объекта.
Также в методах фильтрации рассматривается такое понятие, как истинное значение x,
которое определяется [65] через композицию номинального состояния ̂ и возмущения, или ошибки δx:
= ̂ δx. |
(2.5) |
где x – истинное значение, δx – значение возмущения/ошибки, ̂ – номинальное состояние.
2.1.3. Классификация Нахождение характеристик перемещения устройства или объекта в пространстве и
определение его пути осуществляется в инерциальной системе координат (ИСК) сопряженной
с суточным вращением Земли. Так как ИНС на базе микроэлектромеханических систем состоят из чувствительных датчиков (МЭМС-гироскоп и МЭМС-акселерометр), которые служат для определения характеристик, учитывающих ускорения свободного падения и углового ускорения в инерциальной системе координат, то необходимо принять во внимание суточное вращение Земли при навигации с помощью ИНС. Поэтому чаще всего используются триады датчиков в инерциальных навигационных системах замкнутого типа.
Так как система является замкнутой, то это говорит о наличии обратной связи, а
применение таких систем положительно влияет на точность позиционирования и делает такую систему невосприимчивой к силам инерции при вращательном движении. Различается несколько вариантов построения замкнутой инерциальной навигационной системы по способу реализации:
геометрические системы;
аналитические системы;
полуаналитические системы.
Вполуаналитических системах необходимо выполнить геометрическое построение фигуры в области горизонта, а что касается углов позиционирования объекта относительно широты и долготы, то они определяются в устройстве, отвечающим за математические расчеты.
Вгеометрических системах необходимо определять геометрические фигуры в области горизонта, определять значения углов позиционирования объекта относительно широты и долготы [30].
Ваналитических системах все вычисления определяются в устройстве, отвечающим за математические расчеты.
Полуаналитические инерциальные навигационные системы подразделяются по виду
ориентации в области горизонта:
ортодромическая система, это такая система, в которой измерения направления движения объекта выполняются относительно меридиана и азимута, т.е. угол, образованный между траекторией заданного пути и азимутом, является ортодромическим, отсюда и такое название системы;
географическая система, это такая система, которая ориентирована на определение точных координат отслеживаемого объекта;