

Исследование и разработка алгоритма внутреннего позиционирования с использованием мобильных устройств на основе МЭМС-технологии
.pdf̂ |
̂ |
̂ |
θ[t−1,t] |
+ θ[t,t+1] |
. Кроме того, угол поворота θ определяется как положительный при вращении |
против часовой стрелки и отрицательный при вращении по часовой стрелке.
Рисунок 3.2. Векторная диаграмма направления курсового угла
Гироскоп используется для определения угловой скорости (ω), которая относится к изменениям угла dθ за время dt. То есть,
|
dθ |
(3.4) |
|
|
|
||
= dt |
|||
|
|||
Угловая скорость обычно выражается в градусах в секунду (dps, ◦/s). На рисунке 3.3
показаны три осевых направления гироскопа, где ось Z относится к зенитному направлению,
ось Y относится к направлению курса, а ось X образует правую систему координат,
ортогональную другим осям. В своей работе Ли-Фанг Анга, Дж.; Ли, У.-К.; Оои, Б.-Ю.; Вэй-
Мин Оои, Т.; Хван, С.О. пишут, что «угол является интегралом первого порядка угловой скорости, и одновременные изменения угла идентифицируются посредством интегрирования данных о времени выборки и угловой скорости»9. Скорость обозначается как нулевая при начальном направлении движения (прямо вперед), положительная при вращении против часовой стрелки и отрицательная при вращении по часовой стрелке. Поскольку система PDR
требует точных данных об изменении угла датчика, сглаживание сигналов датчика с помощью фильтров может привести к тому, что результаты расчета угла не отобразят реальное движение. Поэтому данные гироскопа в этом исследовании фильтровать не будем [42].
9 Ли-Фанг Анга, Дж.; Ли, У.-К.; Оои, Б.-Ю.; Вэй-Мин Оои, Т.; Хван, С.О. Подсчет шагов пешеходов с точками коррекции для определения местоположения в помещении и отображения отпечатков пальцев Wi-Fi. J. Intell. Нечеткая система. 2018.
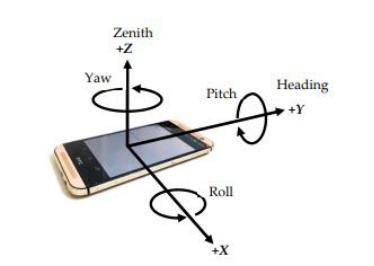
Рисунок 3.3. Осевые направления гироскопа мобильного телефона
3.1.2. Обнаружение шага и оценка длины шага Шаги в основном обнаруживаются посредством измерения расстояния перемещения с
помощью ГНСС и последующего обратного вывода о количестве шагов. Хотя этот подход эффективен, но он неприменим в помещении или в устройствах без сигналов ГНСС. Шаги в помещении можно обнаружить с помощью акселерометров, которые могут удовлетворительно работать как в устройствах, несовместимых с глобальной системой позиционирования, так и в сочетании с ГНСС.
Доступны многочисленные алгоритмы, применимые для обнаружения шагов в акселерометрах, такие как метод пересечения нуля [43, 44], автокорреляция [45–47] и
обнаружение пиков [48–52]. В этом исследовании используем подход обнаружения пиков для обнаружения шагов с помощью акселерометра, в котором максимальное ускорение во время движения пользователя используется для расчета шагов.
В подходе обнаружения пиков шаги могут быть обнаружены на основе цикла походки.
Акселерометр обнаруживает изменения в интервалах шагов, соответствующих циклу походки, чтобы идентифицировать шаги пользователя. Поскольку значения собственных значений сигнала появляются в определенном диапазоне, применение алгоритма скользящего окна может улучшить результаты обнаружения ступеней [41]. В этом исследовании принято семь размеров скользящего окна, а пороговое значение обнаружения пика обозначено как
0,0005 м/с2 (рис. 3.4).
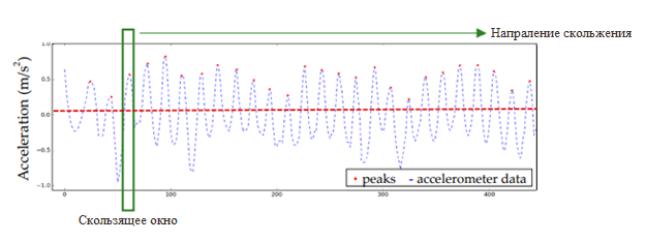
Рисунок 3.4. График обнаружения пиков
Данные акселерометра обрабатываем с помощью фильтра Савицкого–Голея (СГ);
шумы устраним до начала определения темпа. Фильтр СГ представляет собой локальный полиномиальный метод сглаживания данных методом наименьших квадратов, предложенный Савицким и Голеем [53].
Этот метод включает в себя применение полиномиальной регрессии по методу наименьших квадратов для замены исходных данных средневзвешенными значениями соседних точек, тем самым сглаживая данные и уменьшая шумы. Таким образом, точность модели прогнозирования повышается, а ошибки прогнозирования уменьшаются. Кроме того,
форма и ширина сигнала остаются неизменными, а форма и интенсивность пиков формы волны сохраняются [53–55]. Соответственно, фильтр СГ применим для обработки данных с внутренних датчиков позиционирования, значит может быть применен в настоящем исследовании.
На рисунке 3.5 показана основная концепция фильтра СГ, где символ сплошного круга  относится к наблюдаемым выборкам, символ пустого кружка
относится к наблюдаемым выборкам, символ пустого кружка  представляет выходные выборки на основе наименьших квадратов, а символ креста
представляет выходные выборки на основе наименьших квадратов, а символ креста  представляет импульсную характеристику. образцы и постоянная массы. Пунктирная кривая представляет полиномиальную аппроксимацию импульса центрального блока, а сплошная кривая представляет локально подобранный квадратичный полином.
представляет импульсную характеристику. образцы и постоянная массы. Пунктирная кривая представляет полиномиальную аппроксимацию импульса центрального блока, а сплошная кривая представляет локально подобранный квадратичный полином.
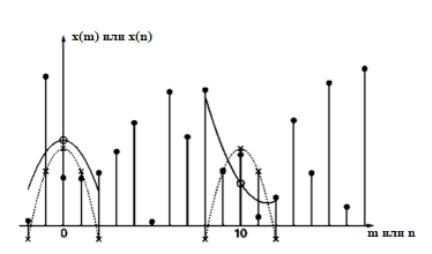
Рисунок 3.5. Диаграмма соответствия полинома наименьших квадратов фильтру Савицкого–Голея (СГ)
Когда задан ряд данных x[n], рассматривается группа из 2M + 1 данных с центром в n = 0, и они аппроксимируются через
|
|
|
( ) = ∑ |
, |
(3.5) |
|
=0 |
|
где невязка подгонки методом наименьших квадратов равна
|
|
|
|
|
= ∑ |
( ( ) − [ ])2 = ∑ |
(∑ |
− [ ])2, |
(3.6) |
|
|
|
|
|
=− |
=− |
=0 |
|
|
где M представляет половину значения интервала оценки. На рисунке 3.5 показан интервал оценки 2 + 1. Сплошная кривая слева представляет результаты подбора, когда
= 2 и = 2. Что касается последовательности подбора с 2 + 1 в качестве интервала оценки, центральная точка интервала смещается. от = 0 до = 1, когда фаза подгонки завершена и начинается другая полиномиальная подгонка. Таким образом, все входные выборки подвергаются подгонке
Результат подгонки при = 0 равен
[0] = [0] = 0, |
(3.7) |
Для завершения процесса подгонки требуется только постоянный член полинома.
Впоследствии средневзвешенные значения выборок рассчитаем с помощью теоремы свертки.
То есть,
|
+ |
(3.8) |
|
|
|
[ ] = ∑ [ ] [ − ] = |
∑ [ − ] [ ], |
|
=− |
= − |
|
где h[m] — конечное значение импульсной характеристики, принятое за взвешенное значение. Что касается 0, согласно принципу наименьших квадратов, когда невязка соответствия представляет собой минимальное значение, ее частный дифференциал с каждым параметром должен быть равен нулю. То есть,
|
|
|
|
|
|
|
|
|
|
||
|
= |
∑ 2 ( ( ) − [ ]) = |
∑ |
2 (∑ − [ ]). |
(3.9) |
|
|||||
|
=− |
=− |
=0 |
|
|
|
|
|
|||
Он может быть реорганизован как
∑ ( ∑ + ) = ∑ |
[ ], = 0,1, … , . |
(3.10) |
|||||||
=0 |
=− |
|
=− |
|
|
|
|
|
|
Матрица плана A применялась в следующем процессе решения. То есть, |
|
||||||||
− ,0 |
− +1,0 |
… 0,0 |
… −1,0 |
,0 |
|
|
|||
− ,1 |
− +1,1 |
… |
0,1 |
… |
−1,1 |
,1 |
|
|
|
(2 +1)×( +1) = [ |
|
|
|
|
|
|
|
], |
(3.11) |
− , |
− +1, |
… 0, |
… −1, |
, |
|
|
|||
где , = , − ≤ ≤ , 0 ≤ ≤ . Применяется вспомогательная матрица B,
иB = ATA, которая рассчитывается по формуле
|
= ∑ |
, |
|
, |
= ∑ + = . |
(3.12) |
, |
|
|
, |
|
||
|
=− |
|
|
|
=− |
|
Вводимые данные определяются как матрица x, а неопределенные коэффициенты определяются как матрица a. Они есть
[− ] |
|
|
[0] |
|
= [ |
] , = [ ]. |
(3.13) |
||
[ ] |
|
|
[ ] |
|
Матрица a вычисляется согласно B = ATA. Они есть |
|
|||
|
|
|
|
(3.14) |
= = , |
||||
|
|
−1 |
|
(3.15) |
= ( ) |
|
= , |
||
где первая строка матрицы H — неопределенный коэффициент свертки. Подробную проверку вышеупомянутых уравнений см. в работах [53,55].
В этом исследовании в качестве вспомогательной карты будет использоваться известная карта помещений для позиционирования, и с помощью этих карт можно определить расстояние перемещения. Расстояние на карте разделено на приведенные выше результаты обнаружения шагов, чтобы определить расстояние перемещения по каждой линейной траектории. Упрощенное уравнение длины шага
|
|
(3.16) |
||
|
|
|
||
= |
, |
|||
|
||||
где SL относится к длине шага, D представляет собой расстояние перемещения, а P
представляет собой количество шагов, результат которых используется для последующего расчета позиции.
3.2. Создание базовой карты Современные люди проводят более 70% своего времени в помещении, что не позволяет
стандартным ГНСС предоставлять услуги. Таким образом, технология точного позиционирования внутри помещений играет ключевую роль в предоставлении применимых и целевых услуг позиционирования для пользователей внутри помещений. Внутренние карты являются неотъемлемой частью систем внутреннего позиционирования. Текущий приемлемый диапазон точности позиционирования в существующей технологии позиционирования внутри помещений составляет 5–10 м, что соответствует точности позиционирования на уровне помещения. Уменьшение дальности до 1-2 м (точность на уровне стола) желательно для повышения эффективности передачи сигнала о местоположении [13].
В этом исследовании используются МЭМС-датчики в мобильных телефонах для сбора данных о местоположении. Например, позиционирование на основе инерциальных единиц измерения приводит к дрейфу сигнала во времени, что подрывает надежность службы позиционирования. Поэтому при проектировании внутренней системы позиционирования необходимо учитывать калибровку ошибок, чтобы получить более точные результаты позиционирования.
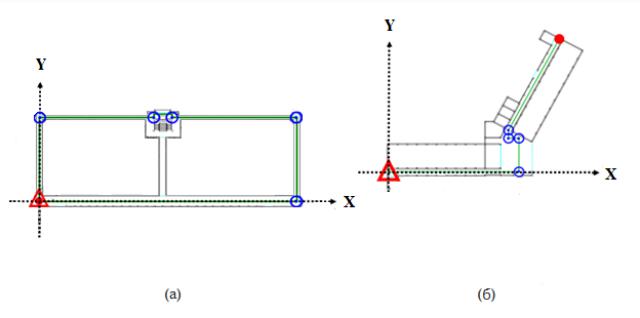
Чтобы результаты позиционирования оставались в разумном диапазоне ошибок, для ограничений позиционирования будем использовать известные планы помещений. Первые этажи двух уникальных зданий были обозначены как экспериментальные поля, обозначенные как поля 1 и 2, и были проиллюстрированы в виде карт с помощью AutoCAD (рисунок 3.6).
Рисунок 3.6. Точки калибровки траектории и угла на экспериментальных полях: а)
Поле 1; б) Поле 2. ( начальная точка;
начальная точка;  конечная точка;
конечная точка;  калибровочная точка на углу;
калибровочная точка на углу;
 правильное напрвление маршрута)
правильное напрвление маршрута)
Нижний левый угол в каждом поле установлен как начальная точка запланированного маршрута с относительными координатами (0, 0), а области правее оси X и выше оси Y дали положительные значения. Предполагается, что пользователь будет ходить по центральной линии прохода в обоих полях при тестировании позиционирования в помещении и сборе данных. Пешеходная дорожка на Поле 1 представляла собой замкнутую дорожку, где начальная и конечная точки находятся в одном месте, а интервалы между поворотами не слишком малы. Пешеходная дорожка на Поле 2 была соединительной, и интервалы между
поворотами особенно малы. В таблице 3.1 представлены основные сведения о тестах
позиционирования, проведенных в двух полях.
Таблица 3.1. Базовые параметры полей
Путь |
Поле 1 |
Поле 2 |
Тип |
Закрытый |
Соединительный |
Длина |
242 м |
94 м |
Самая узкая ширина |
1.4 м |
1.6 м |
Количество поворотов |
5 |
4 |
3.3. PDR-коррекция
Из-за распространенности ошибок распространения или нерегулярных смещений в большинстве технологий позиционирования внутри помещений в этом исследовании реализованы известные карты помещений для калибровки позиционирования, тем самым уменьшая влияние системных ошибок на результаты позиционирования. В дополнение к применению алгоритма PDR реализованы точки калибровки на линейных траекториях и углах.
Используя определения расстояния, азимута и угла поворота, может повысить точность позиционирования PDR.
3.3.1. Установка точек калибровки
Для обеспечения согласованности между результатами позиционирования PDR и
фактическими траекториями ходьбы для калибровки траектории PDR необходимо установить два типа точек калибровки, а именно угловые и линейные. Точки калибровки углов установить на углах траекторий (рисунок 3.6). Кроме того, вдоль линейных траекторий установить точки линейной калибровки в соответствии с их основными спецификациями, которые нужно определить в соответствии с дрейфами гироскопа.
Проведем регрессионный анализ для расчета степени дрейфа в гироскопе, чтобы установить технические характеристики для точек линейной калибровки. Пользователю предложено пройти по 90-метровому линейному испытательному полю 20 раз, после чего соответствующие данные подвергаются регрессионному анализу в соответствии с вычисленными PDR относительными координатами.
На рисунке 3.7. показаны результаты анализа простой линейной, квадратичной полиномиальной, кубической полиномиальной и полиномиальной регрессии 4 степени. На рисунке 3.7а показан простой линейный регрессионный анализ (R2 = 0,8549), на рисунке 3.7б
— квадратичный полиномиальный регрессионный анализ (R2 = 0,9217), на рисунке 3.7в — кубический полиномиальный регрессионный анализ (R2 = 0,9226), рисунок 3.7г – полиномиальный регрессионный анализ четвертой степени (R2 = 0,9330). Значения по оси X
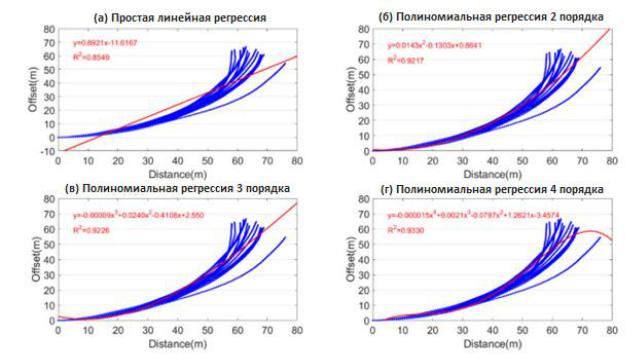
представляют линейное расстояние ходьбы, а значение по оси Y представляет величину дрейфа. Как показано на рисунке 3.7а, результаты простой линейной регрессии значительно отличаются от фактического распределения данных и имели низкий коэффициент детерминации (R2). Поэтому такой подход к анализу не принимается. И наоборот, результаты квадратичной, кубической и полиномиальной регрессии четвертой степени показывают незначительные различия в (R2). Однако уравнение полиномиальной регрессии четвертого порядка подвержено грубой ошибке в данных наблюдениях.
Следовательно, после того, как пройденное расстояние достигло 60 м, в функции регрессии появились экстремальные значения. Поэтому в данном исследовании полиномиальная регрессия четвертого порядка не применяется. Из-за аналогичных результатов квадратичной и кубической полиномиальной регрессии для регрессионного анализа был принят квадратичный полином более низкого порядка с учетом простой модели с быстрым и удобным расчетом. Уравнение этой регрессионной модели: Y = 0,0143X2 - 0,1303X + 0,8641 (рис. 3.7б).
Рисунок 3.7. Регрессионный анализ линейного экспериментального поля
В уравнении квадратичной полиномиальной регрессии Y представляет величину смещения пути, а X представляет линейное расстояние ходьбы. Поскольку предполагается,
что пользователь идет по центральной линии прохода, то пороговое значение смещения
(значение Y) установлено равным половине минимальной ширины прохода (минимальную ширину см. в Таблице 3.1). В соответствии с моделью квадратичной полиномиальной
регрессии интервалы между каждой парой точек линейной калибровки (значение X)
составляют 12 м в поле 1 и 13 м в поле 2. Эквидистантные точки линейной калибровки установлены по результатам расчета интервалов, а интервалы настраиваются автоматически как целое число, кратное расстоянию шагов.
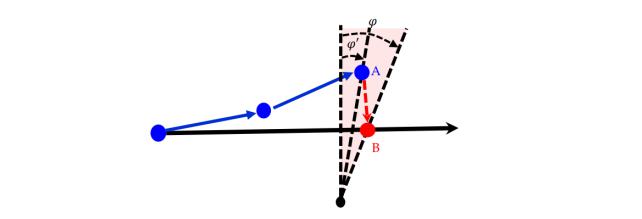
3.3.3. Обнаружение азимута Это обнаружение выполняется в сочетании с вышеупомянутым обнаружением
расстояния. Известная точка на карте используется для расчета азимута ’ от точки датчика и азимута ϕ от точки калибровки. Азимут ϕ является порогом значения азимута. Когда ′ < ,
точка датчика вошла в диапазон, необходимый для калибровки, и определение азимута проводится в сочетании с результатами определения расстояния, чтобы совместить точку A с
точкой калибровки B (рисунок 3.8).
Рисунок 3.8. Векторная диаграмма определения азимута. (  точка калибровки;
точка калибровки;  точка датчика;
точка датчика; правильный путь;
правильный путь;  путь датчика.)
путь датчика.)
3.3.2. Определение расстояния Путем определения расстояний между точкой датчика и точкой калибровки точки
датчика, удовлетворяющие условиям, распределены по узлам, ближайшим к геометрическим расстояниям точек датчика (рисунок 3.9). Длина D’ — это расстояние между точкой калибровки B и точкой датчика A, а длина D — это пороговое значение установленного расстояния. Диапазон калибровки представляет собой окружность с точкой калибровки в центре и длиной D в качестве радиуса. При ’ < условия коррекции выполняются. Тем временем проводится обнаружение азимута, которое подробно описано в следующем разделе,
для сопоставления точки A с точкой калибровки B.