

Т5. Стереомодель. Пряма засічка
.pdfТема 5. Системи координат та елементи орієнтування пари знімків
Тематичний план
1.Монокулярний, бінокулярний та стереоскопічний зір.
2.Стереопара і стереоскопічна модель.
3.Формули зв’язку координат: точок місцевості і координат їх зображень на ідеальній стереопарі (геометрична інтерпретація).
4.Системи координат стереопари. Координати та паралакси на стереопарі.
5.Елементи орієнтування стереопари.
5.1Елементи внутрішнього орієнтування.
5.2Елементи зовнішнього орієнтування стереопари.
5.3Елементи взаємного орієнтування стереопари.
5.4Елементи зовнішнього орієнтування геометричної моделі.
1.Монокулярний, бінокулярний та стереоскопічний зір.
Розрізняють такі види зору: монокулярний; бінокулярний; стереоскопічний.
При монокулярному зорі (зір одним оком) навколишній простір сприймається площинно, хоча за деякими непрямими ознаками можливо говорити про наближеність або віддаленість предметів.
При бінокулярному зорі (зір двома очима) віддалені предмети також сприймаються площинно, але при розгляданні двома очима більш близьких предметів виникає стереоскопічний зір, при якому близькі предмети сприймаються об'ємно (просторово).
Якщо спостерігати за одною точкою А, то оптичні осі очей перетинаються в цій точці, утворюючи кут конвергенції (оптичні осі очей сходяться на предметі). Та якщо одночасно розглядати і другу точку Д то виникає інший кут Нерівність цих кутів викликає нерівність дуг на сітчатці ока.
Різниця дуг називається фізіологічним паралаксом.
Найменша величина зміни паралактичного кута, що сприймається очима, називається гостротою стереоскопічного зору. Для можливості складання топографічних карт методом стереоскопічної зйомки вимірювання по аерознімку повинні виконуватися з дуже малими похибками, порядку 0,01 мм. Стереоскопічний зір не тільки забезпечує високу точність вимірювань, а й дозволяє отримувати просторову стереоскопічну модель місцевості.
Штучний стереоефект – це відчуття об’ємності (рельєфності) предмету, яке виникає при розгляданні площинного зображення. Для отримання стереоефекту необхідно:
•мати два зображення (аерознімка), одного предмету, що отримані з кінців базису фотографування;
•зображення повинне бути зорієнтоване по контурах;
•різномасштабність знімків не повинна перебільшувати 11%.
•кожне око повинно бачити зображення тільки одного із знімків.
Для цього застосовують різні способи розділення зорових осей очей: оптичний (лінзами, призмами або дзеркалами), анагліфічний (зелено-червоними світлофільтрами), поляроїдний (поляризацією світла у взаємно перпендикулярних площинах), растровий (диск, що швидко обертається.)
Об’ємний вигляд предмета при досягненні штучного стереоефекту залежить від того, як будуть розташовані знімки.
При розташуванні знімків перекриттям один до одного всі горби будуть бачитися випуклими, а западини – вгнутими. Це прямий штучний

стереоефект.
При розташуванні знімків перекриттям один від одного всі горби будуть бачитися вгнутими, а западини – випуклими. Це обернений штучний стереоефект.
При розташуванні знімків перекриттям один до одного, але повернутими на 90° штучного стереоефекту не буде. Це нульовий штучний стереоефект.
2. Стереопара і стереоскопічна модель.
Об’ємне зображення, отримане через штучний стереоефект, називається стерео моделлю. Залежно від того, якими проектуючи ми променями будується об’ємне зображення модель може бути реальною або позоровою. Позорова модель будується візирними проектуючи ми променями, наприклад під лінзово-дзеркальним стереоскопом.
Реальна модель будується проектуючи ми променями (стрижнями) на аналогових стереофотограмметричних приладах.
Для отримання штучного стереоефекту потрібна пара знімків одного об’єкту (місцевості), з перекриттям більше 55% отриманих із різних кінців базису фотографування. Така пара називається стереоскопічною, або просто стереопарою. Визначення координат точок на стереопарі здійснюється у базисній системі або в системі лівого знімку. Система лівого знімку має початок координат у центрі лівого знімку ол, її осі Х і Y співпадають із відповідними осями лівого знімку, вісь Z - із головним променем лівого знімку. Система складається із шести елементів: трьох лінійних, які описують положення базису відносно лівого знімку bX, bY, bZ; та трьох кутових, які описують положення правого знімку відносно лівого αп , ωп , κп . Ці елементи називаються елементами взаємного орієнтування.
3.Формули зв’язку координат: точок місцевості і координат їх зображень на ідеальній стереопарі (геометрична інтерпретація).
Розглянемо ідеальну стереопару, в якій αп = ωп = κп = 0 ; bY= bZ = 0 та bX = b.
Аерознімки і базис фотографування В горизонтальні.
Різниці абсцис відповідних точок аерознімків пари називається повздовжнім паралаксом р.
де, р – повздовжній паралакс точки А; хл – координата точки А на лівому знімку;
хп – координата точки А на правому знімку; В – базис фотографування; Н – висота фотографування над точкою А; f – фокусна відстань.

|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
Sл |
|
|
|
|
|
B |
|
Sп |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
ол |
|
|
|
|
|
|
|
|
|
a |
п х |
' |
|
х |
|
aл |
|
|
х |
|
|
||
|
|
п |
|
л |
|
|
H |
|
п |
||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
N |
|
|
|
А' |
B |
А |
X |
|
|
||||
З подібних трикутників SлNA та Sлoлaл:
Звідси:
З подібних трикутників SлAA' та Sлaлaп:
Якщо H=-Z, то
Аналіз формул дозволяє зробити такі висновки:
1.На парі аерознімків ідеального випадку зйомки поздовжній паралакс р даної точки дорівнює базису фотографування В у масштабі цієї точки. При рівнинному рельєфі і 60% повздовжньому перекриттю аерознімків формату 18x18 см величина р ≈ 70 мм.
2.Точки місцевості з однаковими відмітками на стереопарі мають однакові поздовжні паралакси, тобто в цьому випадку p = const якщо Н=соnst.
3.Величина р залежить від рельєфу місцевості і чим вища точка місцевості, і відповідно менша висота Н, тим більша величина р.
4.Повздовжній паралакс р завжди додатній і ніколи не дорівнює нулю.
5.Паралакс збільшується при фотографуванні на довгофокусні камери та при невеликих висотах фотографування.
Якщо відняти паралакси двох точок, які розташовані на різних висотах, але знаходяться на парі
аерознімків, така величина називається p=pA– pB різницею паралаксів:

На основі різниці паралаксів можна визначити перевищення між цими точками за формулою Брока:
де, р – різниця повздовжніх паралаксів точок А і В;
b – базис фотографування в масштабі знімання; Н – висота фотографування над точкою А;
h – перевищення між точками А і В (h = АA – АB).
Аналіз формули дає:
1)Перевищення тим більше, чим більше різниця паралаксів і висота фотографування.
2)Якщо різниця паралаксів дорівнює нулю, перевищення дорівнює нулю.
3)Якщо різниця паралаксів від’ємна, перевищення теж від’ємне.
4.Системи координат стереопари. Координати та паралакси на стереопарі.
Поперечні паралакси – різниці ординат одноіменних точок на стереопарі, викликані елементами взаємного орієнтування стереопари. Якщо правий знімок нахилений або розвернутий відносно лівого, то ординати одної точки А на знімках стереопари будуть відрізнятися.
q=yл – yп
Поперечний паралакс може бути додатнім і від’ємним, може дорівнювати нулю і залежить від величини елементів взаємного орієнтування bX, bY, bZ, αп , ωп , κп.
5.Елементи орієнтування стереопари.
5.1Елементи внутрішнього орієнтування.
5.2Елементи зовнішнього орієнтування стереопари.
Пара знімків – це два знімки, отримані з двох різних центрів проекцій в такий спосіб, що і на лівому, і на правому знімку зобразилась та сама частина об’єкту (місцевості). Таку пару ще називають стереопарою, бо розглядаючи знімки під простим приладом – стереоскопом, можна побачити просторову модель об’єкта, тобто відчути його об’ємність.
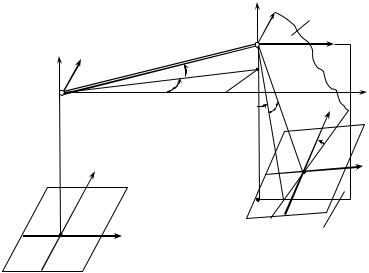
Елементи зовнішнього орієнтування (рис.1) – це величини, що визначають положення лівого і правого центрів проекцій, Sл та Sп і відповідних площин лівого Pл та правого Pп знімків у вибраній просторовій системі координат ОХYZ*. Цими елементами є:

|
Z |
|
|
|
|
|
Z |
Y |
|
|
|
|
|
|
|
Sп |
|
|
|
B |
ν |
|
|
|
|
Bz |
|||
|
|
|
|||
|
|
|
|
||
|
Sл |
|
|
By |
ω2 |
|
|
Bx τ |
|
||
|
|
|
|
x α2 |
|
|
α1 ω1 |
|
y1 |
|
ZS2 |
|
|
|
|
ν1 |
|
|
|
|
κ1 |
x1 |
ν2 |
|
|
o1 |
|
|
|
|
|
|
|
|
|
|
ZS1 |
|
P |
|
|
|
|
1 |
|
|
|
|
ν1 |
|
|
|
|
|
|
|
|
|
N2 |
|
Y |
|
|
|
|
|
N1 |
|
|
Ys2 |
|
|
|
|
|
|
|
|
Ys1 |
XS2 |
|
|
|
O |
XS1 |
|
|
||
|
|
|
|
|
|
y2 
ν2
κ2 x2
o2
P2
X
Рис.1 Елементи зовнішнього орієнтування пари знімків
XSл, YSл, ZSл – просторові координати лівого центра проекції Sл; |
|
|
αл, ωл, κл – повздовжній, поперечний кути нахилу лівого знімка Pл |
та кут його розвороту; |
|
XSп, YSп, ZSп – просторові координати правого центра проекції Sп; |
|
|
αп, ωп, κп – повздовжній, поперечний кути нахилу правого знімка |
Pп та кут його розвороту. |
|
Вектор B називають базисом фотографування.
Координати правого центра фотографування можна обчислити через координати лівого центра фотографування і проекцій базису фотографування В на координатні вісі (компоненти базису): XSп= XSл+Bx; YSп= YSл+By; ZSп=ZSл+Bz. Обчислення базисних компонентів BX, BY, BZ виконується за формулами:
BX |
cos cos |
|
BY |
= B A = B cos sin |
(1) |
BZ |
sin |
|
На підставі (1) значення кутів ν і τ обчислюють за формулами:
= arcsin |
B |
= arctg |
|
B |
|
, |
= arctg |
B |
|
Z |
B |
|
Z |
|
Y |
||||
|
|
|
|
|
|
||||
|
B |
|
2 |
+ B |
2 |
|
|
B |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
X |
Y |
|
|
Z |
|
(2)
Якщо відомі лінійні елементи зовнішнього орієнтування базиса фотографування знаходять за формулою:
B = |
X |
2 |
+ Y |
2 |
+ Z |
2 |
|
|
|
|
|||
|
|
s |
s |
|
|
s |
XSл, YSл, ZSл, XSп, YSп, ZSп, тоді довжину
(3)
де ΔXS=XSп-XSл; ΔYS=YSп-YSл; ΔZS=ZSп-ZSл;
Якщо врахувати елементи орієнтування базиса фотографування, тоді елементами зовнішнього
орієнтування пари знімків в координатній системі OXYZ можна представити у вигляді: |
|
X Sл , YSл , Z Sл , л , л , л , B, , , п , п , п |
(4) |
В допоміжній фотограмметричній системі координат S1XYZ, яка паралельна до координатної системи ОXYZ, початок координат суміщений з центром проекції лівого знімка, а отже XSл=YSл=ZSл=0. Тому для пари знімків в координатній системі SлXYZ з 12 елементів зовнішнього орієнтування які не дорівнюють нулю буде дев’ять:

|
л |
, |
, |
, B, , , |
п |
, |
, |
п |
|
л |
л |
|
п |
|
(5)
5.3 Елементи взаємного орієнтування стереопари
Для побудови моделі об’єкта використовується система координат SлX'Y'Z', у якій початок координатної системи суміщений з центром проектування лівого знімка, т.б. X'Sл=Y'Sл=Z'Sл=0. Отже в системі координат моделі об’єкта із 12 елементів орієнтування пари знімків не рівними нулю будуть дев’ять, за аналогією (5). Для відмінностей їх від елементів зовнішнього орієнтування пари знімків в системі координат об’єкта, позначено їх із «штрихом», а базис позначено буквою в, так як його довжина задається в масштабі моделі і він називається базисом проектування.
, , , в, , , , , |
(6) |
|||||
л |
л |
л |
п |
п |
п |
|
Для облегшення побудови моделі, розміщення пари знімків в системі координат моделі задають так, щоб частина елементів орієнтування (6) були рівними нулю. Для цього використовують декілька координатних систем, серед яких найпоширенішими є дві.
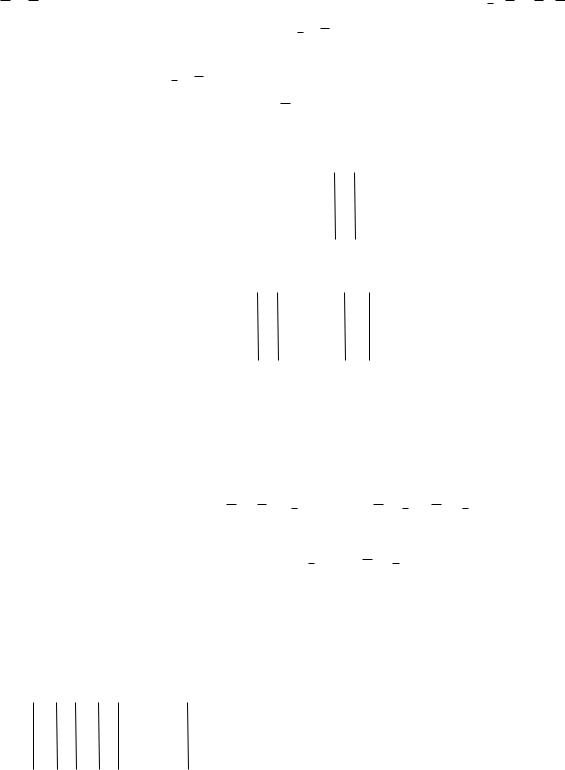
1. Перша система взаємного орієнтування часто називається базисною (рис.2).
В цій системі базис фотографування в незалежно від його розміщення в просторі приймається за горизонтальний, і знаходиться на осі абсцис допоміжної системи координат SлX1'Y1'Z1' площина Х1Y1 яка також умовно приймається горизонтальною.
Елементи, які визначають взаємне розміщення знімків Рл і Рп, зв’язані системою координат
Z1
S |
1 |
Y1
площина
S o Y |
||
1 |
1 |
1 |
Z2
S2
Y2
площина
X S, |
o Y |
|
1 |
2X 2 |
2 |
|
2 |
|
л
y1  л
л
o |
x |
1 |
1 |
|
площина |
X S Z |
||
1 |
1 |
1 |
п
п
|
y |
|
|
|
2 |
|
|
|
|
|
|
|
|
п |
|
o |
2 |
x |
2 |
|
|||
|
|
|
площина
Рис. 2. Базисна система
X S Z елементів взаємного орієнтування2 2 2
SлX1'Y1'Z1', паралельно до якої розміщується система координат другого знімку S2X2'Y2'Z2'. Елементами взаємного орієнтування в цій системі являється α'1 – повздовжній кут нахилу
лівого знімку. Кут α'л лежить в головній базисній площині лівого знімку; α'п – поздовжній кут нахилу правого знімку; χ'л – кут на лівому знімку між віссю х1 системи координат o1x1y1 і слідом січення лівого знімка головної базисної площини Z'1X'1; χn – також на правому знімку; ω'n – поперечний кут нахилу правого знімку. Деколи цей кут називають взаємним поперечним кутом. Поперечний кут нахилу лівого знімка приймається рівним нулю.
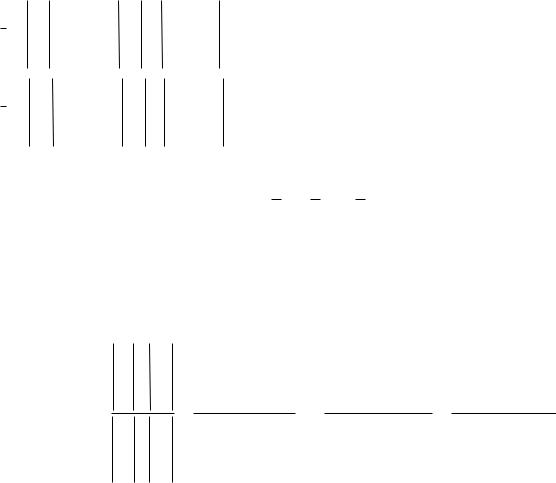
2. В другій системі взаємного орієнтування базис проектування розміщується по напрямку на центр проекції S2, який приймається за початок допоміжної системи координат S2Х2Y2Z2, до паралельної нерухомої системи S1X1'Y1'Z1' (рис.3), а лівий знімок приймається горизонтальним.
Z |
|
1 |
Y |
|
|
|
1 |
S1
y1
B bx
by
Z |
|
Y |
2 |
2 |
|
|
|
|
S |
|
|
|
2 |
|
b |
|
|
|
z |
|
|
|
|
площина S2о2Y2
|
|
X |
|
|
|
2 |
|
|
|
X |
|
|
|
1 |
|
|
y |
|
|
|
2 |
|
|
|
|
|
|
o |
2 |
x |
2 |
|
|||
|
|
|
|
o1
площина
x1
Рис. 3. Лінійно-кутова система елементів взаємного орієнтування
Елементами взаємного орієнтування в цій системі являються; τ – кут між віссю х1 на лівому знімку і слідом січення головної базисної площини Z1X1 лівого знімку; ν – кут нахилу базису фотографування в відносно площини Х'1Y'1 системи координата S1X1'Y1'Z1'; α'2 – поздовжній кут нахилу правого знімку відносно площини Z1Y1 системи координат S2X2'Y2'Z2'; ω'2 (Δω) – поперечний кут нахилу правого знімку; χ'2 (Δχ) – кут повороту правого знімку в своїй площині, складений напрямком осі х2 і слідом січення головної базисної площини правого знімку.
Обидві розглянуті системи взаємного орієнтування, а деколи і їх сукупність, знаходять широке використання, як при складанні топографічних планів з допомогою аналогових стереофотограмметричних приладів, так і при визначенні координат точок аналітичними способами. Якщо елементи взаємного орієнтування відомі, то можна отримати модель місцевості,
використовуючи пару |
знімків. |
Масштаб отриманої |
моделі залежить від базису проектування b – відстань між центрами |
проекцій S1 і S2 проектуючих камер приладу. Чим ця відстань більша, тим масштаб геометричної моделі крупніший і навпаки.
Елементи взаємного орієнтування можуть бути знайдені фотограмметричними методами. Числові значення елементів взаємного орієнтування зчитують із шкал стереофотограмметричного приладу, після завершення процесу взаємного орієнтування в аналоговому методі побудови моделі об’єкта або є визначають аналітично в аналітичному методі.
Правильно відтворене взаємне орієнтування пари знімків дозволяє побудувати стереофотограмметричну модель об’єкта, як правило, в фотограмметричній системі координат та у довільному масштабі, так як базис проектування впр вибирається довільно.
5.4 Елементи зовнішнього орієнтування геометричної моделі.
Побудована в результаті розв’язання задачі взаємного орієнтування модель об’єкта має невизначене (довільне) положення в абсолютній (геодезичній) системі координат. Масштаб цієї моделі є теж довільний, оскільки величина базису проектування SлSп (рис.2 і рис.3) була вибрана довільно.
Нехай O3Х3Y3Z3 (рис.4) – деяка зовнішня система координат, яку в західній літературі називають абсолютною системою координат: цій системі відповідає геодезична система координат OrХrYrZr. Орієнтування моделі М в зовнішній (геодезичній) системі координат визначають такі параметри:

Z |
З |
(Z |
Г |
) |
Z |
|
|
|
Ф |
|
|
|
|
|
|
|
o |
|
|
|
|
|
|
O |
|
|
|
|
Ф |
Y |
( X |
Г |
) |
|
З |
|
|
|
|
|
|
Y |
|
|
|
|
|
0 |
|
X 0 |
|
|
|
Ф |
|
|
|
|
|
Ф |
|
|
|
|
O |
(O |
) |
З |
Г |
|
YФ 
 o
o
 o Z0Ф
o Z0Ф
XФ
модел  M
M
X |
З |
(Y |
) |
|
Г |
|
Рис. 4. Орієнтування моделі в абсолютній (геодезичній) системі
XОфYОфZОф – перенесення початку системи координат OФХФYФZФ в початок системи координат
O3Х3Y3Z3;
α0, ω0, κ0 – кути Ейлера, що визначають нахил осей координат двох просторових систем координат;
1:t – масштаб моделі (який після взаємного орієнтування є довільний або невідомий), який необхідно визначити або змінити до заданої величини, наприклад, до масштабу карти.
6. Визначення координат точок моделі місцевості за елементами зовнішнього орієнтування пари аерознімків (Пряма фотограмметрична засічка для стереопари)
1.Загальні формули прямої фотограмметричної засічки для стереопари.
Розглянемо точку місцевості М, яка при фотографуванні з точок S1 і S2 зобразилась на знімку
Р1 і Р2 в точках m1 і m2 (рис.1).
Z
|
|
|
Y |
|
|
S |
|
|
|
1 |
r |
|
|
|
|
|
|
1 |
|
|
s |
|
|
Z |
R |
1 |
|
|
|||
|
|
|
P |
|
|
|
Y |
Rm
O
Z 
S |
2 |
|
B R0
r2
X
m2 
m1 
R2
R1
M
X
Y
X
P2
Рис. 1. Пряма фотограмметрична засічка
В такому випадку для побудови моделі місцевості необхідно зберегти положення знімків відносно центрів фотографування та їх орієнтування відносно системи координат місцевості. Іншими словами для розв’язання даної задачі необхідно знати елементи внутрішнього (x0, y0, f) та зовнішнього (Xs1, Ys1, Zs1, α1, ω1, χ1, Xs2, Ys2, Zs2, α2, ω2, χ2) орієнтування пари знімків. Для стереопари аерознімків елементи внутрішнього орієнтування однакові для лівого та правого знімків. Елементів зовнішнього орієнтування для стереопари дванадцять. Таким чином стереопара знімків має п'ятнадцять елементів орієнтування.
Задача визначення просторових координат точок моделі об’єкта з використанням стереопари при відомих елементах орієнтування називається прямою фотограмметричною засічкою. Загальний розв’язок даної задачі, без будь-яких обмежень на нахили знімків, виглядає наступним чином.
Положення точок S1 і M в системі координат місцевості OXYZ визначається векторами Rs і Rм ; точок m1, M і S2 в координатній системі S1XYZ – векторами r1 , R1 , і R0 (B ); а точок m2 і М в координатній системі S2XYZ – векторами r2 і R2 . Координати осі системи OXYZ, S1XYZ і S2XYZ є взаємно паралельними.
Оскільки вектори r2 і R2 колінеарні, то:
R = N |
1 |
r |
1 |
1 |
де N1 – скаляр.
Після проектування векторів цього рівняння на координатній осі, дістанемо:
(1)
X |
|
|
X |
||
|
|
|
|
|
1 |
Y |
= N |
|
Y |
||
|
|
|
|||
|
|
1 |
1 |
||
Z |
|
|
Z |
||
|
|
|
|
|
1 |
(2)
де X'1, Y'1, Z'1 – просторові координати точки m1 в координатній системі S1XYZ, що визначається за відомими формулами для поодинокого знімка (___), а саме:
X |
|
x |
л |
1 |
|
|
|
Y |
= A |
y |
л |
1 |
( , , )л |
|
|
Z |
|
− |
f |
1 |
|
|
|
Матриця напрямних косинусів визначається за формулами (___) за кутовими елементами зовнішнього орієнтування лівого знімка αл, ωл, χл, xл, yл – плоскі координати на лівому знімку в
координатній системі Oлxy. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
Для |
визначення скаляра |
N1 |
використовуємо |
положення правого знімка. Вектори |
|||||||||||||||||||||
|
|
|
|
|
|
теж колінеарні, а їх векторний добуток, |
чисельно рівний площі побудованого на них |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
r2 і R2 = R1 − R0 |
|||||||||||||||||||||||||||||||
паралелограма, дорівнює нулю, отже: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
(R − R |
0 |
) r |
= 0 |
або |
R r |
= R |
0 |
r |
|||||||||||||
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Підставивши R1 з (1), маємо: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
N r |
|
r |
|
|
= R |
0 |
r |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
2 |
|
|
|
|
|
|
2 |
|
|
|
||||||
звідси скалярний множник N1: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
N1 = |
R |
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
r2 |
|
|
|
|
|
(3) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r1 r2 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
Формули (3) є формулами для визначення масштабного множника N1, які представлені у |
|||||||||||||||||||||||||
векторній формі. Переходячи до координатної форми, маємо: |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
X 0 |
BX |
X S 2 − X S1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R0 = Y0 = BY |
= YS 2 −YS1 |
компоненти базиса фотографування В |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
Z0 |
BZ |
Z S 2 − Z S1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
X |
|
B |
X |
|
X |
л |
− X |
o |
||||
|
1 |
|
|
|
|
|
|||||||
r |
= Y |
= A |
B |
|
= |
Y |
л |
− Y |
|
|
|||
1 |
1 |
|
( , , )л |
|
Y |
|
|
o |
|
|
|||
|
Z |
|
B |
Z |
|
|
|
− f |
|
|
|||
|
1 |
|
|
|
|
|
|
|
|
|
|||
|
X |
|
|
B |
X |
|
X |
п |
− X |
o |
|||
|
|
2 |
|
|
|
|
|
|
|
|
|||
r |
= Y |
|
= A |
B |
= |
Y |
− Y |
|
|
||||
2 |
2 |
( , , )л |
|
|
Y |
|
|
|
п |
o |
|
||
|
Z |
|
|
B |
Z |
|
|
|
− f |
|
|
||
|
2 |
|
|
|
|
|
|
|
|
|
|
||
просторові координати точки m1 в координатній системі S1XYZ
просторові координати точки m1 в координатній системі S2XYZ
В кінцевому вигляді зв'язок координат можна представити так:
|
|
|
|
|
|
|
|
|
|
R |
M |
|
= R |
S |
+ NR |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
або |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X = Xs + NX |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Y = Ys + NY |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z = Zs + NZ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Записавши вираз (3) в координатній формі, маємо: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
B |
x |
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
B |
y |
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
B |
z |
Z |
|
B |
y |
Z |
− B |
z |
Y |
|
|
|
B |
x |
Z |
|
− B |
z |
|
X |
|
B |
x |
|
Y |
− B |
y |
X |
|||
N = |
|
2 |
= |
|
2 |
|
|
|
2 |
= − |
|
|
2 |
|
|
2 |
= |
|
|
2 |
|
|
2 |
|||||||||
X |
|
X |
Y Z |
− Y |
Z |
X Z |
− X |
|
Z |
X |
Y − X |
|
Y |
|||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
1 |
2 |
|
1 |
2 |
2 |
|
|
1 |
|
|
|
1 |
|
2 |
|
|
2 |
1 |
|
|
1 |
2 |
|
|
2 |
1 |
||||
|
Y |
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Z |
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Формули (5) і (6) використовують для визначення координат точок місцевості за аерофотознімків.
(4)
(5)
(6)
парою
2. Алгоритм розв’язання прямої фотограмметричної засічки.
Приведемо послідовність обчислень координат точок місцевості за виміряними координатами xл, yл, xп, yп (відповідно для точок m1 і m2) при відомих елементах внутрішнього і зовнішнього орієнтування:
1.За даними кутовими елементами зовнішнього орієнтування лівого (αлωлχл) і правого (αпωлχл) обчислюють напрямні косинуси для обох знімків, використовуючи формули (___).
2.Обчислюють просторові координати X'1Y'1Z'1 та X'2Y'2Z'2 для точок m1 та m2 в допоміжних системах координат S1XYZ і S2XYZ за формулами (____).
3.Обчислюють масштабний коефіцієнт N за формулою (6)
4.Обчислюють шукані просторові координати за формулами (5)
Формули (5) і (6) виражають залежність між координатами точки місцевості в координатній системі OXYZ для загального випадку знімання і є справедливими для довільних значень елементів зовнішнього орієнтування. На практиці цими формулами користуються рідко, оскільки елементи зовнішнього орієнтування переважно невідомі, або відомі з недостатньою точністю. Однак, досить часто, особливо при аналізі точності фотограмметричних процесів, використовують формули прямої засічки ідеального випадку, які досить легко отримати із формул прямої засічки загального вигляду.