

Конспект лекцій 4 (Аналітичне розв’язання основних фотограмметричних задач)
.pdfТема 4. Аналітичне розв’язання основних фотограмметричних задач
за стереопарою знімків.
4.1.Формули зв’язку координат точок місцевості і їх зображень на стереопарі знімків (пряма фотограмметрична засічка).
4.2.Формули зв’язку координат точок місцевості і координат їх зображень на стереопарі знімків ідеального випадку знімання.
4.5. Умова, рівняння і елементи взаємного орієнтування знімків.
4.4.Визначення елементів взаємного орієнтування.
4.5.Побудова фотограмметричної моделі.
4.6. Зовнішнє орієнтування моделі. Елементи зовнішнього орієнтування моделі.
4.7.Визначення елементів зовнішнього орієнтування моделі за опорними точками.
4.8.Визначення елементів зовнішнього орієнтування знімків стереопари.
4.9.Точність визначення координат точок об’єкта за стереопарою знімків.
4.10.Визначення координат точок місцевості за стереопарою знімків методом подвійної оберненої фотограмметричної засічки.
1
4.1. Формули зв’язку координат точок місцевості і їх зображень на стереопарі знімків (пряма фотограмметрична засічка).
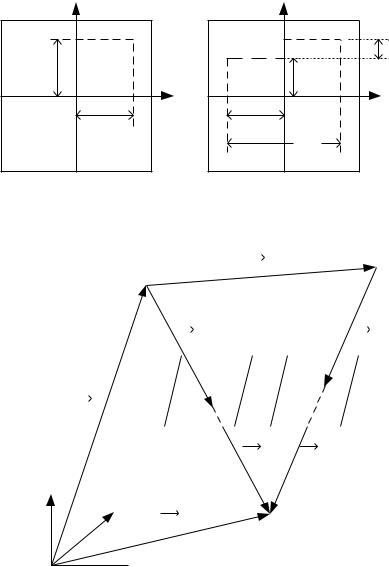
На рис.4.1 показано стереопару знімків Р1 і Р2, на яких точка місцевості М зобразилась відповідно в точках m1 та m2. Будемо вважати, що елементи внутрішнього і зовнішнього орієнтування знімків відомі.
y |
|
|
y |
|
m |
1 |
|
m |
1 |
• |
m2 |
• |
||
|
|
|
q |
|
у1 |
|
• |
|
|
|
|
y2 |
|
|
|
x |
|
x |
|
|
|
|
||
х1 |
|
x2 |
p |
|
P1 |
|
P2 |
|
|
|
|
|
Рис.4.1. p=x1-x2 – повздовжній паралакс; q=y1-y2 – поперечний паралакс.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
•S2 |
||
|
|
|
|
|
|
|
|
B |
|
|
|
|
||||
|
|
S1• |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
r1 |
|
|
r2 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P1 |
P2 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
m2 • |
||||
|
|
|
|
|
m1 • |
|
|
|
|
|
|
|
||||
RS1 |
|
|
|
|
|
|
|
|
||||||||
R1 R2
X
Y |
• M |
|
|
|
RM |
O•  Z
Z
Рис.4.2.
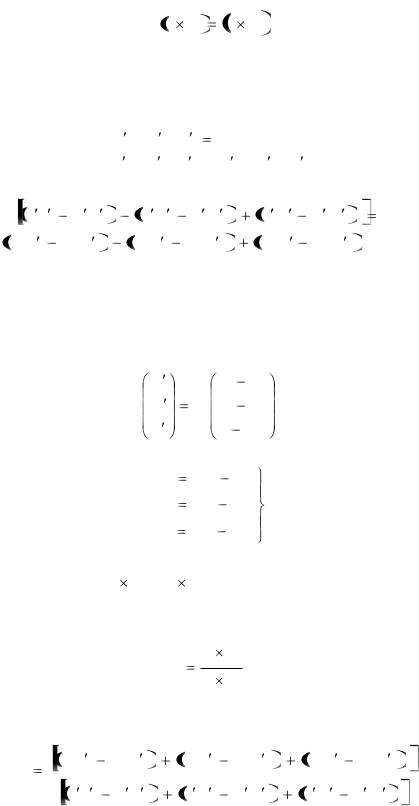
Виведемо формули зв’язку координат точок місцевості і координат їніх зображень на стереопарі знімків.
|
|
|
|
|
|
|
З рис.4.2 слідує, |
що |
вектори |
RM |
та RS визначають |
||
|
|
|
|
|
1 |
|
відповідно |
положення точки |
місцевості М |
і центра |
проекції |
||
S1 знімка |
Р1 відносно початку |
системи |
координат |
об’єкта |
||
2

OXYZ. Вектор |
|
визначає |
положення |
центра |
проекції |
S2 |
|
В |
|||||||
знімка Р2 відносно центра проекції S1. |
|
|
|
||||
Вектори S1m1 |
|
|
визначають |
положення точок m1 |
та |
||
r1 та S1M R1 |
|||||||
М відносно |
центра |
проекції S1. Вектори |
|
|
|||
S2 m2 r2 таS2 M |
R2 |
||||||
визначають положення точок m2 та М відносно центра проекції
S2.
З рис.4.2 слідує, що
|
|
|
|
|
|
|
|
|
|
RM |
RS |
R1 |
(4.1) |
|
|
|
1 |
|
|
|
Так як вектори |
колінеарні, то |
|
||||
R1 та r1 |
|
|||||
|
|
|
|
|
; |
(4.2) |
|
|
|
R1 Nr1 |
|||
де N – скаляр. |
|
|
|
|
|
|
З врахуванням (4.2) вираз (4.1) буде мати вид |
|
|||||
|
|
|
|
|
|
|
|
|
|
RM |
RS |
Nr1 . |
(4.3) |
|
|
|
|
1 |
|
|
В координатній формі вираз (4.3) буде мати вид |
|
|||||
|
|
|
X |
XS |
X1 |
|
|
|
|
|
1 |
|
|
|
|
|
Y |
YS |
N Y1 ; |
(4.4) |
|
|
|
|
1 |
|
|
|
|
|
Z |
ZS |
Z1 |
|
|
|
|
|
1 |
|
|
де X1’,Y1’,Z1’ –координати вектора r1 в системі координат об’єкта OXYZ.
X1 |
x1 |
x |
Y1 |
A1 y1 |
y |
Z1 |
|
f |
0 1
0 1 .
Знайдемо значення N, що входить у рівняння (4.4). З рис.4.2 слідує, що
|
|
|
|
|
|
|
|
|
|
|
R 2 |
R1 |
B ; |
|
|
або, з врахуванням (4.2) |
|
|
|
||||
|
|
|
|
|
|
||
|
|
|
R 2 |
Nr1 |
B . |
(4.5) |
|
Так як вектори |
колінеарні, то їх векторний добуток |
||||||
R1 |
і r1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
R2 |
r2 |
0. |
(4.6) |
|
Враховуючи (4.5) вираз (4.6) можна представити в виді
|
|
|
|
|
0 ; |
Nr B r2 |
N r1 |
r2 |
B r2 |
||
або
3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N r1 |
r2 |
|
|
|
B |
r2 . |
(4.7) |
||
Вираз (4.7) можна представити в виді |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
i |
j |
k |
|
|
|
i |
j |
k |
|
|
N |
X1 |
Y1 |
Z1 |
|
|
|
BX |
BY |
BZ |
|
; |
|
X 2 |
Y2 |
Z2 |
|
|
|
X 2 |
Y2 |
Z2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
або
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N Y1Z2 |
Y2 Z1 i X1Z2 |
X2 Z1 j X1Y2 |
X2 Y1 |
k |
|
|
|
|
; |
(4.8), |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
BY Z2 |
BZ Y2 i BX Z2 |
BZ X2 j BX Y2 |
BY X2 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де |
i, j, k - орти, співпадаючі |
з |
|
осями координат |
X,Y,Z |
системи |
|||||||||||||||||||
координат об’єкта OXYZ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
BX, BY, BZ, X1’, Y1’, Z1’, X1’, Y1’, Z1’ – координати векторів |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В, r1 |
та r2 в системі координат об’єкта OXYZ. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
Xi |
|
|
|
|
|
x i |
|
x 0i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Yi |
|
Ai |
|
yi |
|
y0i ; |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Zi |
|
|
|
|
|
|
|
fi |
|
|
|
|
|
|
|
|
|
|
|
де i – номер знімка, а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
BX |
|
XS |
2 |
XS |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
BY |
|
YS |
2 |
YS |
|
|
|
|
|
|
|
|
|
|
(4.9) |
||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
BZ |
ZS |
2 |
ZS |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
Так як вектори |
|
|
|
|
|
|
колінеарні |
(бо |
вектори |
|
||||||||||||||
|
В |
r2 |
та r1 |
r2 |
|
|
B, r1, r2 |
||||||||||||||||||
компланарні), значення N можна знайти як відношення їх |
|||||||||||||||||||||||||
модулів, тобто |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
B |
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
N |
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
(4.10) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
r1 |
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
В координатній формі вираз (4.10) з врахуванням (4.8) |
||||||||||||||||||||||||
має вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
BY Z2 |
BZ Y2 |
2 |
BX Z2 |
|
2 |
BX Y2 |
BY X2 |
2 |
|
2 |
|
|
|
|
||||||||
|
N |
|
|
BZ X2 |
|
|
|
|
|
; |
(4.11) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||||||
|
|
|
Y1Z2 |
Y2 Z1 |
2 |
X1Z2 |
|
2 |
X1Y2 |
X2 Y1 |
2 |
|
2 |
|
|
|
|
|
|
||||||
|
|
|
|
X2 Z1 |
|
|
|
|
|
|
|
|
|
||||||||||||
У колінеарних векторів відношення їх координат рівне відношенню їх модулів, тому можна записати, що:
4

N |
BY Z2 |
BZY2 |
; |
4.12 |
||
|
|
|||||
|
Y1Z2 |
Y2 Z1 |
|
|||
N |
BX Z2 |
BZ X 2 |
; |
(4.13) |
||
|
|
|
||||
|
X1Z2 |
X 2 Z1 |
|
|||
N |
BX Y2 |
BY X 2 |
. |
(4.14) |
||
|
|
|||||
|
X1Y2 |
X 2Y1 |
|
|||
Таким чином, якщо відомі елементи внутрішнього і зовнішнього орієнтування стереопари знімків і виміряні на цих знімках координати відповідних точок x1,y1 та x2,y2, то спочатку потрібно визначити за однією з формул (4.12)- (4.14) значення скаляра N, а пізніше за формулою (4.4) обчислити координати точки місцевості X,Y,Z.
4.2. Формули зв’язку координат точок місцевості і координат їх зображень на стереопарі знімків ідеального випадку знімання
Відеальному випадку знімання кутові елементи
орієнтування знімків стереопари 1= 1= 1= 2= 2= 2=0, а базис фотографування паральний осі Х системи координат об’єкта
OXYZ.
В такому випадку координати базису |
|
|
будуть рівні BX=B, |
||||||||||||||
В |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
BY=BZ=O (B-модульм вектора |
В ). |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Приймемо, що |
XS |
YS |
|
ZS |
0, |
тобто |
|
початок |
системи |
||||||||
|
1 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
координат об’єкта |
OXYZ суміщено |
з |
точкою |
|
S1), |
f1=f2, a |
|||||||||||
x0i=y0i=0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так як кутові елементи орієнтування |
знімків рівні |
||||||||||||||||
нулю, то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 0 |
|
|
Xi |
|
|
xi |
|
|
|
|
||||
А1 |
А2 |
Е 0 1 0 |
; |
|
Y |
|
|
y |
i |
; |
|
|
|
||||
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
0 |
0 1 |
|
|
Zi |
|
|
|
f |
|
|
|
|
|||
де i – номер знімка. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При цьому вираз (4.13) прийме вид |
|
|
|
|
|
|
|
|
|||||||||
N |
BX Z2 |
BZ X2 |
|
|
B f |
|
|
|
|
|
B |
|
|
B |
; |
(4.15) |
|
X1Z2 |
X2 Z1 |
|
|
x1 |
f x 2 |
f |
|
x1 |
x 2 |
|
p |
||||||
|
|
|
|
|
|
|
|||||||||||
а вираз (4.4), котрий ми представимо у виді
5

X |
XS |
|
|
NX1 |
|
||
|
1 |
|
|
|
|
|
|
Y |
YS |
|
NY1 |
; |
|||
|
1 |
|
|
|
|
|
|
Z |
ZS |
|
NZ1 |
|
|||
|
1 |
|
|
|
|
|
|
буде: |
|
|
|
|
|
|
|
X |
Nx1 |
|
|||||
Y |
Ny1 ; |
(4.16) |
|||||
Z |
|
Nf |
|
||||
а враховуючи (4.15) |
|
|
|
|
|
|
|
|
X |
|
B |
x1 |
|
||
|
|
|
|
|
|||
|
|
|
p |
|
|||
|
Y |
|
B |
y1 ; |
(4.17) |
||
|
|
|
|
||||
|
|
|
p |
|
|||
|
Z |
|
|
B |
f |
|
|
|
|
|
|
|
|||
|
|
|
|
p |
|
||
Так як з третього рівняння виразу (4.17)слідує, що
Z |
|
B |
; |
f |
|
p |
|
|
|
то формули зв’язку координат (4.17) можна представити так:
X |
Z |
x1 |
|
||
|
f |
|
Y |
|
Z |
y1 |
(4.18) |
|
|
|
|
|||
|
|
f |
|
||
Z |
B |
f |
|
||
|
|
||||
|
|
p |
|
||
4.5. Умова, рівняння і елементи взаємного орієнтування знімків.
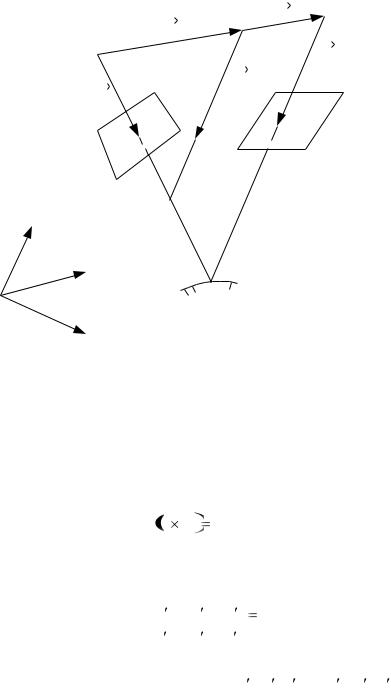
На рис.4.3 представлена стереопара знімків Р1 та Р2 в положенні, яке вони займали в момент фотографування.
Люба пара відповідних променів в цьому випадку
перетинається в точці М місцевості |
і лежить в площині, що |
|
|
проходить через базис фотографування |
В (базисній площині). |
6
|
|
|
|
|
|
|
|
|
|
|
S |
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
S'2 B |
|
• |
2 |
||||
|
|
|
|
|
|
|
|
|
|||||
S |
b |
• |
|
|
|
|
|||||||
|
•1 |
|
|
|
|
|
|
|
r |
2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r2 |
|
|
|
|
|||
|
r1 |
|
|
P2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
P1 •m1 |
|
•m'2 |
|
|
•m2 |
|
|
|
|
|||
|
|
|
|
• M' |
|
|
|
|
|
|
|
|
|
Z
M
|
|
Y |
O |
• |
M |
|
||
|
|
|
M |
|
|
|
|
X |
|
|
M |
 •
•

 M
M
Рис. 4.3.
Очевидно, що в цьому випадку вектори |
|
|
, що лежать |
||
В, r1 |
та r2 |
||||
в базисній площині, компланарні. |
|
|
|
||
Як відомо з аналітичної геометрії, змішаний добуток |
|||||
компланарних векторів дорівнює нулю. |
|
|
|
||
Таким чином |
|
|
|
|
|
|
|
|
|
|
|
В r1 |
r2 |
0 . |
|
|
(4.19) |
Умова компланарності в координатній формі має вид:
|
|
|
|
|
BX BY |
BZ |
|
|
|
|
|
|
|
|
|
|
|
|
X1 |
Y1 |
Z1 |
0 . |
|
|
|
(4.20) |
|
|
|
|
|
|
X2 |
Y2 |
Z2 |
|
|
|
|
|
|
В рівнянні |
(4.20) |
BX , BY , BZ , X1 , Y1 , Z1 та X2 , Y2 , Z2 |
координати |
||||||||||
векторів |
|
|
в |
системі |
координат |
фотограмметричної |
|||||||
В, r1 |
та r2 |
||||||||||||
моделі ОМХМYMZM, в загальному |
випадку |
довільно розташованій |
|||||||||||
і орієнтованій. |
|
|
|
|
|
|
|
|
|
|
|
||
Далі цю систему координат будемо називати просто |
|||||||||||||
системою координат моделі. |
|
|
|
|
|
|
|
|
|||||
Умова (4.20) зв’язує між собою |
тільки |
напрямки |
|||||||||||
векторів |
і |
виконується |
при |
будь-яких |
значеннях |
їхніх |
|||||||
модулів. |
Тому значення |
модуля |
вектора |
|
можна |
вибрати |
|||||||
В |
|||||||||||||
довільно. |
Напрямок |
вектора |
|
|
визначається |
двома |
|||||||
|
В |
||||||||||||
незалежними |
величинами. |
В |
якості |
таких |
величин |
можна |
|||||||
7
|
|
|
|
|
|
|
|
|
|
||
вибрати координати bz та bу |
вектора |
b , колінеарного вектору |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
В , задавши величину координати bx довільно. Часто величину |
|||||||||||
bx обирають рівною 1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При цьому напрям вектора В |
будуть визначати величини: |
||||||||||
b |
|
BY |
|
та |
|
b |
|
|
BZ |
. |
|
y |
BX |
|
Z |
|
|
||||||
|
|
|
|
|
BX |
||||||
|
|
|
|
|
|
|
|||||
Вираз (4.20) в такому випадку буде мати вид: |
|||||||||||
|
|
|
bY |
bZ |
|
|
|
|
|
||
|
|
|
1 |
|
|
|
|
|
|||
|
|
|
|
X1 |
Y1 |
Z1 |
|
0 |
(4.21) |
||
|
|
|
|
X2 |
Y2 |
Z2 |
|
|
|
|
|
В рівнянні (4.21)
Xi |
xi |
x0i |
Yi |
Ai yi |
y0i , |
Zi |
|
fi |
де i – номер знімка, а А’1 – ортогональна матриця,
елементи aij |
котрої є |
функціями |
кутових |
елементів |
орієнтування |
i-го знімка |
i’, i’, |
i’відносно |
системи |
координат моделі ОМХМYMZM.
У виразі (4.21), який є рівнянням взаємного орієнтування в загальному виді, куди крім координат відповідних точок, виміряних на стереопарі знімків, і
елементів |
внутрішнього |
орієнтування |
входять 8 |
параметрів |
||
by, bz, |
1’, 1’, |
1’, |
2’, |
2’, |
2’, котрі |
визначають |
кутову орієнтацію базису фотографування і |
стереопари |
|||||
знімків відносно системи координат моделі ОМХМYMZM. |
||||||
Причому параметри 1’ та |
2’ визначають поворот знімків |
|||||
стерепари довкола осі ХМ, параметри bz, 1’, 2‘ – поворот базису фотографування і стереопари знімків довкола осі YM,
а параметри by, 1’, 2 ‘ – поворот базису фотографування і стереопари знімків довкола осі ZM.
Однак, з цих 8 параметрів лише 5 визначають взаємну кутову орієнтацію базису фотографування і стереопари знімків.
Умова (4.21) виконується при будь-якій орієнтації системи координат моделі ОМХМYMZM. Отже, її можна орієнтувати таким чином, щоб 3 з 8 параметрів стали рівними нулю.
8
Очевидно, що в загальному випадку можна зробити рівними нулю тільки один з параметрів, що входить в три групи параметрів:
– |
1’, |
2’; |
– |
bz, |
1’, 2‘; |
–by, 1’, 2’.
Таким чином, в якості елементів взаємного орієнтування можна вибрати любу комбінацію із восьми параметрів by, bz,
1’, |
1’, |
1’, |
2’, 2’, |
2’, крім комбінацій, в котрі |
||||||||||||
одночасно входять дві трійки параметрів |
bz, |
1’, |
2‘ та |
by, |
||||||||||||
1’, |
2’, а також пара параметрів |
1’ и |
2’. |
|
|
|
||||||||||
Розглянемо |
найбільш |
поширені |
системи |
елементів |
||||||||||||
взаємного орієнтування: |
|
|
|
|
|
|
|
|
|
|||||||
Система |
1’, |
|
1’, |
2’, |
|
2’, |
2’. |
Якщо |
прийняти |
при |
||||||
цьому, що by=bz= |
1’=0, то рівняння (4.21) має вид: |
|
||||||||||||||
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
X1 |
Y1 |
Z1 |
Y1Z2 |
Y2 Z1 |
0 . |
|
(4.22) |
|||
|
|
|
|
|
|
X2 |
Y2 |
Z2 |
|
|
|
|
|
|
|
|
|
Система by, bz, |
2’, |
2’, |
2’. Якщо |
при цьому |
прийняти, |
||||||||||
що |
1’= |
1’= |
1’ =0, то рівняння (4.21) буде мати вид: |
|
||||||||||||
|
|
|
|
|
|
|
|
1 |
|
b y |
bz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
x1 |
x 0 1 |
|
y1 y0 1 |
f1 |
|
0 ; |
|
(4.23) |
|
|
|
|
|
|
|
|
|
X2 |
|
Y2 |
Z2 |
|
|
|
|
|
|
|
|
1 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
так як |
A1 |
E 0 |
1 |
0 . |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
Коментарій. 3 решти із 8 параметрів після вибору 5 елементів взаємного орієнтування задають орієнтацію системи координат моделі ОМХМYMZM. Наприклад, вибравши систему
елементів |
взаємного |
орієнтування |
by, |
bz, |
2’, |
2’, |
2’ і |
|
прийнявши, |
що 1’= |
1’= 1’ |
=0, |
ми |
таким |
чином |
задаємо |
|
систему координат моделі ОМХМYMZM, осі якої паралельні осям |
||||||||
x, y, z |
системы |
координат |
першого |
знімка |
стереопари |
|||
S1x1y1z1. Загалом кажучи, значення трьох параметрів можна задавати довільно.
9
4.4. Визначення елементів взаємного орієнтування
Для |
визначеня |
елементів |
взаємного орієнтування в |
|||||
якості |
вихідного |
використовують |
рівняння |
взаємного |
||||
орієнтування (4.21) |
|
|
|
|
|
|
|
|
|
|
|
bY |
bZ |
|
|
|
|
|
|
|
1 |
|
|
|
||
|
|
|
X1 |
Y1 |
Z1 |
0 . |
|
|
|
|
|
X2 |
Y2 |
Z2 |
|
|
|
Кожна точка, виміряна на стереопарі знімків, дозволяє скласти одне рівняння (4.21), в котре, разом з виміряними координатами точок на стереопарі знімків, елементів внутрішнього орієнтування і трьох параметрів, які задають орієнтацію системи координат моделі, входять 5 невідомих елементів взаємного орієнтування.
Очевидно, що для визначеня елементів взаємного орієнтування необхідно виміряти на стереопарі знімків не менше 5 точок.
Вякості прикладу розглянемо визначення елементів
взаємного орієнтування by, bz, 2’, В зв’язку з тим, що рівняння
попередньо приводять до лінійного рівнянь поправок:
2’, 2’.
(4.21) нелінійні, їх виду і переходять до
a1 bz |
a2 by a3 |
2 a4 2 a5 |
2 |
. (4.24) |
В рівнянні |
поправок |
коефіцієнти |
ai |
є частковими |
похідними від функції (4.21) за відповідними аргументами, а ℓ– вільний член.
Значення коефіцієнтів аi в рівнянні (4.24) розраховують за такими відомими значеннями:
–виміряними координатами точок на стереопарі знімків – хi, yi;
–елементами внутрішнього орієнтування знімків fi,
x0i, y0i;
–3 параметрами, задаючими орієнтацію системи
координат моделі (в нашому випадку 1’, 1’,  наближеними значеннями елементів взаємногоорієнтування. Вільний член ℓ розраховується за формулою (4.21). Отриману систему рівнянь поправок розв’язують методом
наближеними значеннями елементів взаємногоорієнтування. Вільний член ℓ розраховується за формулою (4.21). Отриману систему рівнянь поправок розв’язують методом
наближень, а у випадку, коли виміряно понад 5 точок - по методу наименьших квадратів (під умовою VTPV=min). В результаті вирішення знаходять значення елементів взаємного орієнтування.
10