

Конспект лекцій 3 (Спостереження та вимірювання цифрових зображень)
.pdf1
Тема 3. Спостереження та вимірювання цифрових зображень
3.1. Адресація пікселів. Піксельні координати.
3.2. Внутрішнє орієнтування знімка в системі координат цифрового зображення
3.3.Способи спостереження та вимірювання стереопар цифрових знімків.
3.4.Автоматизировані методи вимірювання точок на стереопарі цифрових знімків.
3.1. Адресація пікселів. Піксельні координати.
Растрове цифрове зображення зберігається в пам’яті комп’ютера як прямокутна матриця, елементи ij якої несуть інформацію про оптичні щільності або колір елементарних
ділянок зображення, а номери i рядка та j стовпця елемента ij визначають його положення в
матриці. Нумерація рядків та стовпців матриці цифрового зображення розпочинається з нуля. Координати центрів пікселів в лівій прямокутній системі координат цифрового зображення оCxCУC (рис.1), початком якої є лівий верхній кут цифрового зображення, визначаються в так званих піксельних координатах (одиницею виміру в цьому випадку є піксел).
Рис.1.
Піксельні координати центрів пікселів в системі координат цифрового зображення
оCхCуC визначають за формулами: |
|
|
|
x |
p |
j 0.5 |
|
|
|
(1) |
|
|
|
. |
|
yp |
i 0.5 |
|
|
|
|
|
|
Для вимірювання координат точок цифрового зображення його візуалізують на екрані дисплея. Якщо піксел зображення на екрані дисплея відповідає пікселу вихідного цифрового зображення, то с допомогою “миші” чи клавіатури комп’ютера можна навести вимірювальну марку (курсор) на точку зображення з точністю до одного піксела.
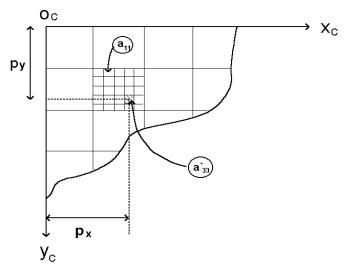
Для отримання субпіксельної точності можна збільшити матрицю зображення на екрані монітора відносно вихідного цифрового зображення. В цьому випадку кожен піксел вхідного зображення буде зображатись матрицею n×n пікселів, числові значення всіх елементів a'ij якої будуть рівні числовому значенню елемента ij матриці вхідного зображення.
Піксельні координати точок збільшеного зображення можна виміряти з точністю до 1/n піксела вхідного зображення (рис.2).
Піксельні координати (в пікселах вхідного зображення) елемента a'ij збільшеного зображення визначають за формулою:
1
2
x |
|
|
j |
j |
|
0.5 |
|
|
||
|
|
|
||||||||
p |
|
|
n |
, |
|
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
i |
|
(2) |
||||
yp |
i |
0.5 |
|
|
|
|||||
|
|
|
n |
|
|
|||||
|
|
|
|
|
|
|
|
|
||
де i,j - номера рядка і стовпця елемента матриці вихідного зображення, в якому знаходиться елемент a'ij збільшеного зображення:
i’,j’ -номери рядка і стовпця елемента a`ij підматриці n×n; n – коефіцієнт збільшення зображення.
Рис. 2.
Наприклад, для елемента a’33 (рис.2) піксельні координати:
Xp 1 |
|
3 0.5 |
1.7 |
|
5 |
|
|||
|
|
|
||
Yp 1 |
3 0.5 |
1.7 |
||
5 |
|
|||
|
|
|
||
Значення фізичних координат центрів пікселів цифрового зображення можна визначати за значеннями їх піксельних координат, якщо відомі фізичні розміри сторін піксела зображення.
Значення фізичних координат визначають за формулами:
xc yc
x |
|
|
|
|
p |
|
|
y |
. |
(3) |
|
|
|
||
|
|
p |
|
Наприклад, координати центра піксела, відповідного елементу a’33 (рис.2) при величині
=20мкм будуть рівні хC = 34мкм та yC = 34мкм.
Якщо в цифровій системі початок системи координат цифрового зображення оCхCуC вибирають в центрі піксела, розташованого у верхньому лівому куті цифрового зображення, тоді значення піксельних координат розраховують за формулами (при вимірюваннях з точністю до піксела):
x |
p |
j |
|
|
|
|
|
|
|
, |
(4) |
y |
p |
i |
|
|
|
|
і при вимірюваннях з субпіксельною точністю за формулами:
2
3
x p
y p
j 0.5 |
j |
|
0.5 |
|
|
||
|
|
||||||
|
|
n |
|
|
|||
|
|
|
|
|
|||
i 0.5 |
i |
0.5 |
|
. |
(5) |
||
|
|
||||||
|
|
|
n |
|
|
||
|
|
|
|
|
|
||
Розглянутий вище метод вимірювання цифрового зображення з субпіксельною точністю вимагає його збільшення на екрані дисплея комп’ютера. Однак, навіть при збільшенні цифрового зображення тільки вдвічі, на екрані дисплея вихідний аналоговий знімок побудується з досить значним оптичним збільшенням. Так, наприклад, знімок, перетворений на сканері, з розміром піксела 14мкм на екрані дисплея з розміром зерна 0.28мм при збільшенні цифрового зображення знімка в 2 рази має оптичне збільшення 40крат. Таке збільшення призводить до значного погіршення візуального сприйняття зображення і, як наслідок - до зниження точності наведення вимірювальної марки на об’єкти зображення.
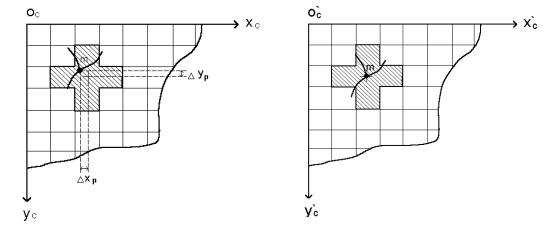
З метою забезпечення можливості зміни координат точок цифрового зображення з субпіксельною точністю без збільшення вихідного зображення застосовують метод вимірювання цифрових зображень, в якому зображення знімка може зміщуватись відносно нерухомої вимірювальної марки з кроком в n раз меншим розміру піксела. Принцип вимірювання координат точок цифрового зображення за цим методом показано на рис. 3 і 4.
На рисунку 3 представлено фрагмент вихідного цифрового зображення з вимірювальною маркою і точкою зображення m, координати якої необхідно виміряти. Як слідує з рис.3 центр зображення вимірювальної марки не співпадає з зображенням точки m, причому різниці значень їх піксельних координат складають величини xP та yP.
Рис. 3. |
Рис. 4. |
Для суміщення центра зображення вимірювальної марки з точкою m можна створити фрагмент цифрового зображення знімка, в якому координати початку системи координат
|
xp , а |
|
y p . |
o’Cx’Cy’C будуть мати значення xoc |
yoc |
Створення такого фрагменту цифрового зображення виконується наступним чином. За координатами центра кожного піксела фрагменту зображення x’pi, y’pi визначають значення координат його проекції xpi, ypi в системі координат оCхCуC вихідного зображення. Їх значення визначають за формулами:
x |
p i |
x |
x |
|
|
|
p i |
|
p i |
|
|
|
|
y p i |
|
. |
(6) |
y p i |
y p i |
|
|||
|
|
|
|
|
|
3
4 |
|
|
|
|
|
|
|
|
|
|
Далі за значеннями координат xpi, ypi |
||||||
|
|
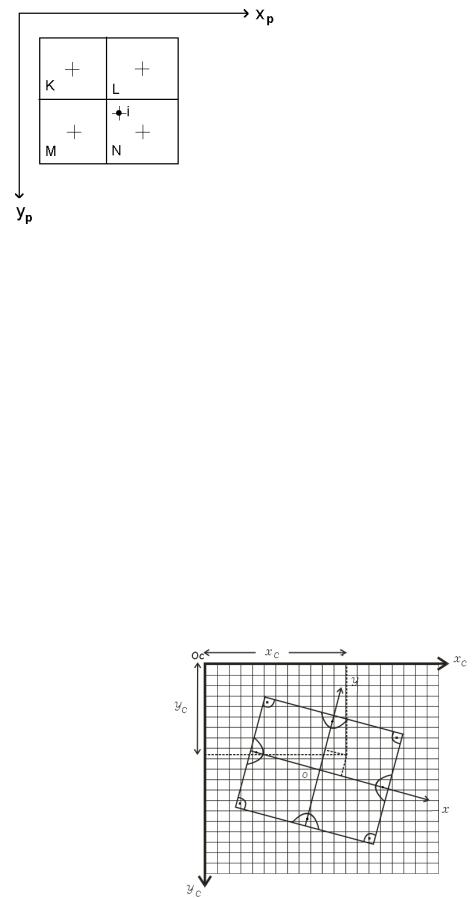
знаходять найближчі до зображення точки i, |
||||||
|
|
відповідної центру піксела створюваного фрагмента |
||||||
|
|
цифрового зображення, чотири піксели вихідного |
||||||
|
|
цифрового зображення, наприклад, M,K,L,N (рис.5). |
||||||
|
|
Методом білінійної |
інтерполяції |
|
визначають |
|||
|
|
значення оптичної щільності i-го піксела |
||||||
|
|
створюваного фрагмента зображення за формулою: |
||||||
|
|
Di |
D1 (D2 D1) xp |
, |
(7) |
|||
|
|
в якій |
|
|
|
|
|
|
|
Рис.5. |
D |
(D D ) y |
|
|
|||
|
D |
|
||||||
|
|
p |
||||||
|
|
1 |
K |
M |
K |
|
|
|
|
|
D D (D D ) y |
|
|
. |
|||
|
|
p |
|
|||||
|
|
2 |
L |
N |
L |
|
||
Таким же чином формуються всі елементи створюваного фрагмента цифрового зображення.
На екрані дисплея центр вимірювальної марки буде суміщено із зображенням точки m. Піксельні координати точки m зображення в системі координат вихідного зображення визначаються за формулами 6.
Необхідно відмітити, що створення фрагмента цифрового зображення вимагає значних об’ємів обчислень. Тому для досягнення ефекту плавного переміщення зображення на екрані дисплея відносно марки в “реальному масштабі” часу фрагмент зображення не повинен мати великі розміри.
У випадку, якщо для вимірювань використовуються кольорові цифрові зображення при формуванні елементів створюваного зображення методом білінійного трансформування за формулами (7) визначаються інтенсивності червоного (R), зеленого (G) та синього (В) компонентів кольорового зображення.
3.2. Внутрішнє орієнтування знімка в системі координат цифрового зображення
Для забезпечення можливості визначеня координат точок в системі координат знімка за значеннями їх координат в системі координат цифрового зображення виконується процес внутрішнього орієнтування знімка, в результаті якого визначаються параметри, характеризуючі положення і орієнтацію системи координат знімка Sxyz в системі координат цифрового зображення ocxcyc, а також параметри, дозволяючі виключити вплив систематичної деформації фотоматеріалу, на якому було отримано вхідний аналоговий знімок (рис.6).
Рис.6
4
5
Для визначеня параметрів внутрішнього орієнтування знімка вимірюють координати зображень координатних міток знімка в системі координат цифрового зображення oC xC yC.
Вибір метода визначення параметрів внутрішнього орієнтування знімка залежить від методики фотограмметричного калібрування знімальної камери.
Якщо в результаті фотограмметричного калібрування знімальної камери були визначені координати координатних позначок в системі координат знімка Sxyz, то для визначення координат точок в системі координат знімка за значеннями їхніх координат в системі цифрового зображення використовують формули афінного перетворення координат:
x |
a |
|
x |
|
a |
|
a |
|
|
|
0 |
|
P c |
0 |
|
1 |
|
|
|
|
|
|
|
|
|
|
y |
b0 |
|
yc |
b0 |
|
b1 |
||
які можемо представити в розгорнутому виді:
x a0 a1 xc a2 y2 y b0 b1 xc b2 y2 .
a |
x |
|
, |
2 |
c |
||
b2 |
|
|
|
yc |
|
||
(8)
(9)
Формули (8) дозволяють не тільки визначати положення і орієнтацію системи координат знімка в системі координат цифрового зображення, а й враховувати систематичні спотворення знімка, виникаючі в процесі формування зображення.
Параметри афінного перетворення ai, bi можна визначити за координатами xc, yc координатних позначок знімка, виміряних на цифровому зображенні, та значеннями координат x,y цих позначок в системі координат знімка, отриманими при калібруванні знімальної камери.
Для визначення параметрів ai,bi для кожної мітки, виміряної на цифровому зображенні, складають рівняння:
a |
|
a x |
|
a |
|
y |
|
x |
|
|
|
0 |
1 |
c |
|
2 |
|
c |
|
x . |
(10) |
b0 b1 xc b2 yc y y |
|
|
||||||||
Отриману систему рівнянь вирішують методом найменших квадратів і визначають в результаті вирішення значення параметрів ai, bi. Для їх визначення необхідно виміряти не менше 3-х координатних позначок.
В практиці виникає задача визначення координат точок в системі координат цифрового зображення за координатами цих точок, отриманими в системі координат знімка. Таке перетворення координат виконується за формулами:
x |
x a |
|
|
A |
||
|
|
P 1 |
0 |
|
|
1 |
y |
y b |
|
B |
|||
|
|
|
0 |
|
|
1 |
A |
x a |
|
|
|
2 |
|
0 |
|
(11) |
B |
y b |
|
|
|
2 |
|
0 |
|
|
або |
|
|
x a |
|
A |
y b |
|
|
|||
x |
|
A |
|
|
|||||||
|
c |
1 |
|
0 |
|
|
2 |
0 |
. |
(12) |
|
y |
c |
B |
x a |
0 |
B |
y b |
|
|
|||
|
1 |
|
|
|
2 |
0 |
|
|
|||
В формулах (11) та (12) Ai, Bi – елементи оберненої матриці Р-1. |
|||||||||||
Значення піксельних координат точок xp,yp визначають за формулами: |
|||||||||||
|
|
|
x p |
|
x |
c |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
y p |
. |
|
(13) |
||
|
|
|
y p |
|
|
|
|
||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
5
6
У випадку, коли при калібруванні знімальної камери визначались відстані між координатними позначками lx, ly (рис.7), для визначеня координат точок в системі координат знімка за виміряними координатами точок в системі координат цифрового зображення використовують формули:
|
|
|
|
|
|
|
|
|
|
|
|
Рис.7 |
x kx cos xc |
a0 sin yc |
b0 |
|
|
||||||||
y k |
|
sin x |
|
a |
|
cos y |
|
b |
, |
(14) |
||
y |
c |
0 |
c |
|
|
|||||||
|
|
|
|
|
|
0 |
|
|
||||
в яких:
a0, b0 – координати початку системи координат знімка в системі координат цифрового зображення;
- кут розвороту осі х системи координат знімка відносно осі хC системи координат
цифрового зображення;
kx, ky – коефіцієнти деформації знімка по осям x та y.
Якщо калібровані відстані між координатними позначками lx, ly невідомі, то для
визначення координат точок в системі координат знімка використовують формули: |
|||||||||
x cos xc |
a0 |
|
sin yc b0 |
|
(15) |
||||
y sin x |
|
a |
|
cos y |
|
b |
. |
||
c |
0 |
c |
|
|
|||||
|
|
|
|
0 |
|
|
|||
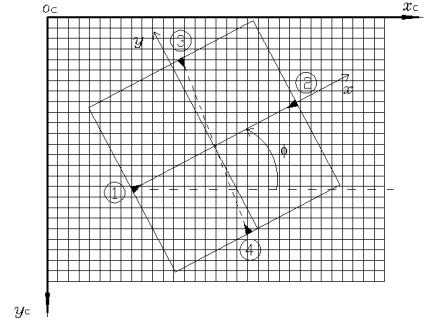
Значення параметрів , a0, b0, kx, ky визначають за виміряними значеннями координат координатних позначок в системі координат цифрового зображення системи.
Значення кута визначають за формулою:
arctg |
yc2 |
yc1 |
, |
(16) |
|
|
|||
|
xc2 |
xc1 |
|
|
в якій xc1, yc1 та xc2, yc2 – координати 1 та 2 координатних позначок в системі координат цифрового зображення.
Значення коефіцієнтів kx, ky визначають за формулами:
6

7
k x |
|
l |
x |
|
|
|
|
|
|
l |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
lx |
xc 2 xc1 |
2 yc 2 |
yc1 2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
l y |
|
|
|
|
|
|
l y |
|
|
|
|
|
, |
(17) |
||
k y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
l y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2 |
|
2 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
xc3 xc 4 |
|
|
yc3 |
yc 4 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
в яких:
lx, ly –калібровані значення відстаней між координатними позначками;
xci, yci –координати координатних позначок в системі координат цифрового зображення.
Параметри a0, b0 визначають як координати xc, yc |
точки перетину прямих ліній, |
|||||||||||||||||||||||||||
проведених через координатні позначки 1-2 та 3-4 за формулами: |
|
|
|
|
|
|
||||||||||||||||||||||
a0 |
|
yc4 yc1 |
a1 x1 a2 x4 |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
a1 a2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
(18) |
||||||
b y |
|
|
a |
|
a |
|
|
x |
|
y |
|
a |
|
a |
|
x |
|
|
|
|
||||||||
c1 |
|
0 |
c1 |
c4 |
2 |
0 |
c 4 |
|
|
|
||||||||||||||||||
0 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
в яких: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 |
|
|
|
|
|
y |
c 2 |
y |
c1 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
xc 2 xc1 |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
yc 3 yc 4 |
. |
|
|
|
|
|
|
|
||||||||||
|
|
b1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
xc 3 xc 4 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Для визначення координат точок знімка в системі координат цифрового зображення за |
||||||||||||||||||||||||||||
координатами цих точок в системі координат знімка використовують формули: |
|
|||||||||||||||||||||||||||
x |
|
a |
|
|
|
1 |
|
|
cos x sin y |
|
|
|
|
|
||||||||||||||
c |
0 |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
k x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
(19) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
yc |
b0 |
|
|
|
|
|
sin x cos y |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
k y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
у випадку, якщо калібровані відстані lx, ly відомі, і формули: |
|
||
xc |
a0 |
cos x sin y |
(20) |
|
b0 |
, |
|
yc |
sin x cos y |
|
|
у випадку, коли lx, ly не відомі.
Необхідно відмітити, що в зв’язку з тим, що система координат цифрового зображення ліва, в формулах 14 – 20 координата yc береться з оберненим знаком.
Визначення піксельних координат точок зображення виконують за формулами (13).
3.3. Способи спостереження та вимірювання стереопар цифрових знімків.
Стереоскопічне спостереження та вимірювання стереопар цифрових знімків здійснюється шляхом формування на екрані дисплея комп’ютера фрагментів лівого і правого знімків стереопари та зображень вимірювальних марок.
Раздільне спостереження цих фрагментів лівим і правим оком забезпечується такими методами:
з допомогою стереоскопічної спостережної системи, встановленої перед екраном;
анагліфічним методом;
7
8
з допомогою засувкових окулярів;
поляроїдним методом.
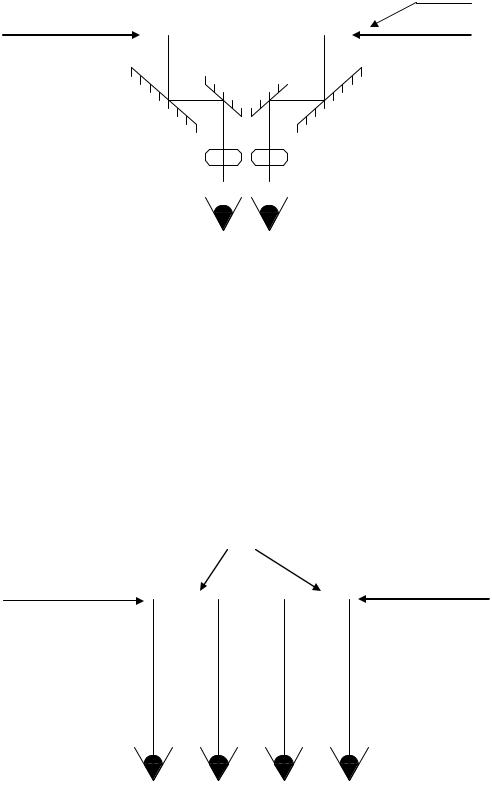
При застосуванні стереоскопічної спостережної системи у вигляді дзеркально-лінзового стереоскопа, його встановлюють перед екраном дисплея, в лівій частині якого формують зображення фрагмента лівого знімка, а в правій частині - фрагмента правого знімка стереопари (рис. 8)
Екран
лівий знімок |
|
|
|
|
|
правий знімок |
|
|
|
|
|
|
|
рис.8
При застосуванні анагліфічного методу на екран дисплея одночасно виводитяться накладені один на одний фрагменти лівого і правого знімків стереопари, перший з яких зафарбовують в синій, а другий - в червоний кольори. Перед лівим оком оператора встановлюють червоний світлофільтр, а перед правим оком – синій. В цьому випадку оператор лівим оком спостерігає тільки лівий знімок, а правим - тільки правий.
Можлива також комбінація червоного і зеленого світлофільтрів, зеленого і синього светлофільтрів.
В засувкових окулярах перед очима спостерігача встановлено рідко кристалічні фільтри, котрі при подачі на них напруги по команді відеокарти стають непрозорими. Стереоскопічне спостереження знімків проводится таким чином: на екрані дисплея почергово виводяться фрагменти лівого і правого знімків стереопари. При виводі лівого зображення правый фильтр непрозорий, а при виводі правого зображення, стає непрозорим лівий фільтр засувкових окулярів (рис.9).
Екран
лівий знімок |
|
|
|
|
|
|
|
|
|
|
|
|
правий знімок |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рис. 9
8
9
При застосуванні поляроїдного методу спостережень перед дисплеєм встанавлюється поляроїдний екран, по команді комп’ютера, змінюючий орієнтацію осі поляризації. Перед очима оператора в окулярах встановлюються поляризаційні фільтри з взаємноперпендикулярними осями поляризації. На екран дисплея перемінно виводяться фрагменти лівого і правого знімків стереопари. При виводі лівого знімка вісь поляризації екрана встановлюєтьсяя параллельною осі поляризації лівого фільтра окулярів, а при виводі правого знімка - паралельною осі поляризації правого фільтра. В цьому випадку лівим оком спостерігається тільки лівий знімок, а правим - тільки правий.
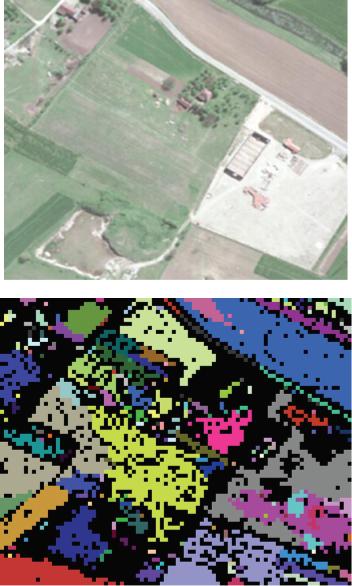
3.4. Автоматизировані методи вимірювання точок на стереопарі цифрових знімків
Ідентифікація точок на парі знімків розглядається як статистична задача розпізнавання зображень при наявності перешкод і спотворень. Вона вирішується з використанням програмних блоків, які називаються кореляторами. В цій задачі важливе поняття образу – деякої довільної за формою і розміром області знімка разом з усією наявною в ній інформацією:
ρi = αρi, вхідн + b |
(21) |
де ρi, вхідн , ρi –оптичні щільності елемента зображення до і після фотометричної корекції; α –
функція, яка визначає відношення між оптичними щільностями вхідного і перетвореного зображень; b - параметр яскравості.
Існуючі методи ототожнення відповідних точок на парі цифрових зображень можна розділити на три групи:
-Методи, основані на аналізі значень пікселів зображення в межах деякої області (ПМ – площинні методи);
-Методи, основані на виділенні елементів зображення (ЕМ);
-Методи, використовуючі зв’язки між елементами зображення (ЗМ).
3.4.1 Площинні методи ототожнення однойменних точок
Суть цих методів зводиться до порівняння щільностей пікселів двох зображень довкола визначуваної точки.
Існує два основних підходи:
Кореляційні методи
Суть цих методів заключається в наступному: фрагмент одного із зображень довкола визначуваної точки як би накладується на інше зображення і переміщається по напрямках x та y з певним кроком. В кожній позиції обчислюють коефіцієнт кореляції R, максимальне значення якого відповідає найкращому співпадінню точок.
Метод найменших квадратів
Метод найменших квадратів дозволяє розрахувати координати відповідної точки на другому зображенні безпосередньо як функцію значень щільностей двох зображень. Деякі різновиди цього способу використовують геометричні зв’язки між точками (рівняння колінеарності). Цей метод має певні переваги у порівнянні з першим методом:
-більш висока точність визначеня відповідних точок;
-стійкість рішення до геометричних спотворень зображень;
-можливість оцінки точності визначення координат.
Недоліки: необхідність знання достатньо точних початкових наближень координат визначуваної точки. Інакше доведеться виконувати багато наближень і як наслідок зростають затрати машинного часу.
9
10
3.4.2. Методи, засновані на виділенні елементів зображення
Сутність цих методів полягає в наступному: спочатку виділяються елементи зображень, а далі вони ототожнюються. В якості елементів зображення можуть бути точки, лінії, полігони. Для виділення цих елементів застосовуються різні оператори, з якими здійснюється згортка зображень.
Наприклад, для точок існують оператори Forstner, Moravic, Dreschler та Mar-Hildreth.
Задача цих операторів знайти на зображенні області з найбільшою зміною контрасту, в яких можна отримати найкращі результати кореляції. Виділені точки з допомогою оператора Forstner інваріантні до поворотів і як наслідок в цих точках кореляція є більш надійна. Оператор Moravic дозволяє виділити точки з контрастом, перевищуючим деякий поріг. Оператор Dreschler розраховує значення кривої Гауса, яке дозволяє визначити точки, приналежні перегинам ліній. Ця характеристика ліній не змінюється в залежності від геометричних спотворень, змін масштабу і повороту зображення. Оператор Marr-Hildreth (або оператор LoG лапласіан гаусіана) фільтрує зображення і одночасно виділяє зони зміни значень щільностей зображення.
Існують різні оператори (Roberts, Prewitt, Sobel), які дозволяють виділити лінії і полігони. Ці оператори засновані на виділенні границь зміни значень щільностей зображення.
10