

Конспект лекцій 3 (Спостереження та вимірювання цифрових зображень)
.pdf11
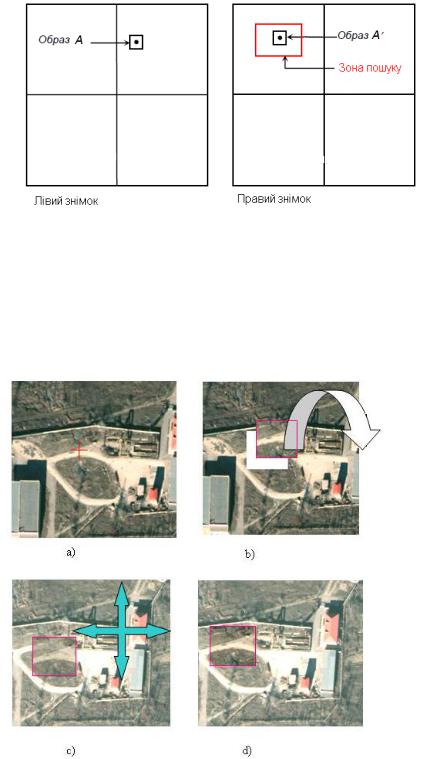
Рис. 10. Процес сегментації: а) оригінальний знімок; б) результат сегментації
Після виділення елементів зображень застосовуються площинні алгоритми ототожнення відповідних точок.
Переваги: 1). Стійкість до шумів зображень, так як аналізуються не самі значення пікселів, а їх зміни у порівнянні із сусідніми, що послаблює вплив шумів зображень. 2). Мала чутливість до геометричних і фотометричних спотворень зображень.
Недоліки: наявність додаткових обчислювальних процедур з виділення елементів зображень.
3.4.3. Методи, використовуючі зв’язки між елементами зображень.
В цих методах спочатку виділяються певні елементи зображень (точки, лінії, полігони), далі визначають характеристики (атрибути) цих елементів, такі як довжина, орієнтація, площа, контраст, середнє значення щільності зображення.
Рис. 11. Знімки стереопари з виділеними на них границями фігур
Після присвоєння цих атрибутів відповідним елементам виконують аналіз зв’язків між цими елементами, використовуючи теорію графів.
Ці методи застосовуються лиш для отримання першого наближення ототожнення однойменних точок чи для загального (наближеного) ототожнення двох зображень. Далі слід застосовувати площинні методи ототожнення відповідних точок для більш точного їх визначення.
Крім розглянутих вище методів існує іще група методів, заснованих на застосуванні теорії динамічного програмування (розв’язок рівнянь з обмеженнями). Однак, ці алгоритми практично мало застосовуються через їхню складність.
Розглянемо більш детально поширені на практиці методи для знаходження відповідних точок на парі цифрових зображень, що перекриваються.
Методи кореляції
Якщо координати точки на лівому знімку відомі, координати відповідної точки на правому знімку визначають у такий спосіб:
(1) Вибрати на лівому знімку образ А (рис.12) як область розміром n× n пікселів і встановити характеристики, необхідні для перевірки умови схожості образів.
11
12
(2) Встановити на правому знімку зону ймовірного розташування шуканої точки (зону пошуку) розміром m×m пікселів.
Рис.11. Принцип роботи корелятора
Послідовним переміщенням образу А розміром n× n пікселів на правому знімку в границях зони пошуку розміром m× m створити на правому знімку серію образів А′ та визначити характеристики кожного з них для перевірки умови схожості.
(4). Співставити характеристики кожного образу А′ з характеристикою-еталоном вектора А. Шукана точка на правому знімку буде розташована в центрі образа А′, для якого виконується умова схожості.
Рис.12.
Мірою відповідності векторів (схожості образів) А та А′ найчастіше є коефіцієнт кореляції, який обчислюється за наступною формулою:
12

13
|
|
n |
|
f2 x2 , y 2 i |
|
|
|
|
R |
f1 x1 , y1 i |
|
|
|
||||
1 |
|
|
|
|
|
(22) |
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
n |
|
n |
|
|
||
|
|
x1 , y1 i |
x2 , y 2 |
i |
||||
|
|
f12 |
f22 |
|||||
|
|
1 |
|
1 |
|
|
|
|
де f1, f2 – функції щільностей пікселів еталонної матриці і матриці пошуку вдповідно, тобто лівого і правого зображень; i – номер пікселя в матриці; n–кількість пікселів в матриці; x1,y1 та x2,y2 -координати центрального пікселя матриці на лівому і правому знімку відповідно.
В якості функцій f1, f2 можуть бути вихідні значення щільностей пікселів, або їхні значення після фільтрації, або значення градієнтів, і т.д. Якщо пара знімків відрізняється один від одного по тону зображення, то в такому випадку корисно вирахувати середнє значення щільності пікселів для кожного зображення і відняти це середнє із кожного пікселя, як для лівого, так і для правого знімків.
Пояснимо формулу (22) з геометричної точки зору. Для цього представимо всі елементи еталонної матриці і матриці пошуку як координати векторів в n мірному просторі (n–число елементів в еталонній матриці) і позначимо ці вектори через f1, f2. З аналітичної геометрії відомо, що два вектори співпадають (рівні) коли рівними є значення координат цих векторів і як наслідок, кут між цими векторами дорівнює нулю. Значення кута між двомо векторами обчислюється за відомою формулою:
cos |
|
|
f1 |
|
f2 |
|
||||
|
|
f1 |
|
|
|
f |
|
( 23) |
||
|
|
|
|
|||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
2 |
|
|
|||
cos 1 коли два вектори колінеарні (співпадають), так як 0 . Іншими словами, коефіцієнт кореляції R являє собою косинус кута між векторами в n просторі, координати яких - це значення щільностей пікселів. Таким чином, R=1 в тому випадку, коли всі значення щільностей пікселів (координати векторів) двох зображень рівні між собою ( 0 ).
Для положення еталонної матриці, коли R приймає максимальне значення, отримаємо відповідну точку на правому знімку з координатами x2,y2. Таким чином, можна отримувати координати відповідних точок на правому знімку з точністю кроку переміщення еталонної матриці по матриці пошуку (в даному випадку – один піксель).
Коефіцієнти, пораховані для поєднання еталонного образу А з усіма образами множини А′, утворюють кореляційну матрицю: максимальне значення її елемента відповідає найбільш тісному зв’язку оптичних щільностей порівнюваних ділянок лівого і правого знімків, отже, виконанню умови (2). Так що шукана точка лежить в центрі образа А′ з максимальним коефіцієнтом кореляції.
Розмір області, відповідної образу А, як правило не перевищує 20×20 пікселів; а при малій кількості контурів місцевості – 40 × 40 пікселів. Розмір зони пошуку на правому знімку повинен перевищувати подвоєні очікувані зміщення точок, викликані впливом рельєфу місцевості і підрахованих за формулою:
(24)
При висоті фотографування над середньою площиною знімка H = 150м, максимальному перевищенні точки над цією площиною h = ± 25 м і відстані від центра знімка до кута робочої площі r = 72 мм (формат знімка 8×12 см) будемо мати δh = 12 мм, і тоді зона пошуку буде мати
13

14
розмір 25×25 мм. Наслідками збільшення зони пошуку може бути деяке збільшення часу обробки в обмін на гарантію попадання в неї відповідної точки.
Спотворення точок, викликані впливом кута нахилу знімка і рельєфу місцевості, викликають зміщення окремих елементів растра, і це не може не позначатися на якості ідентифікації. Так, якщо на лівому знімку образ R завжди представлений квадратом, то на правому знімку через вплив кута нахилу і рельєфу місцевості відповідні елементи образу А' отримують зсув, і в загальному випадку утворюють багатокутник (рис. 13).
Рис.13. Геометричне положення елементів образу на правому знімку спотворене
Оскільки аналізований образ А' геометрично не завжди подібний образу А, то ймовірність повного збігу шуканої точки зменшується.
Для отримання координат з підпіксельною точністю можна зменшити крок переміщення еталонної матриці, наприклад, встановити його рівним 0.1 пікселя. В такому випадку необхідно збільшити зображення в 10 раз, тобто один піксель вхідного зображення займає 10х10 пікселів у збільшеному зображенні. На рис.14 показано приклад отримання збільшеного зображення в два рази. Якщо здійснити кореляцію за таким зображенням, то точність визначення координат буде рівна 0.5 пікселя.
Збільшене зображення Вихідне
зображення
Рис. 14
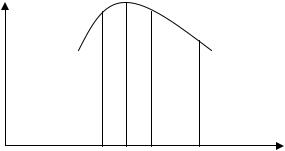
Існує й інший метод отримання субпіксельної точності. Спочатку виконують кореляцію з точністю один піксель, потім вибирають дискретні значення коефіцієнтів кореляції R довкола пікселя з Rmax і описують їх неперервною функцією. Знаючи локальний екстремум цієї функції, можна знайти координати x,y з субпіксельною точністю. В якості прикладу такої функції розглянемо поліном другого ступеня, який описує поверхню, утворену коефіцієнтами кореляції, причому роздільно по кожній координатній осі (рис.15).
R a |
0 |
a |
x a |
2 |
x2 |
|
|||
|
1 |
|
|
|
|
( 25) |
|||
R b |
|
b |
|
y b |
|
|
y 2 |
||
0 |
|
2 |
|
||||||
|
1 |
|
|
|
|
||||
14
15
Для знаходення локального екстремума цієї функції положенням, що похідні функції по x,y в точці екстремума Rmax координати можна знайти за такими формулами:
x |
|
|
a1 |
; y |
|
|
b1 |
|
max |
2a2 |
max |
2b2 |
|||||
|
|
|
|
|||||
|
|
|
|
|
|
|||
R |
|
|
|
Rmax |
|
|
|
|
|
|
|
|
|
|
|
скористаємось відомим рівні нулю, тоді відповідні
( 26)
x
рис. 15
Описати поверхню, утворену коефіцієнтами кореляції можна поліномом, наприклад, такого виду:
R a |
0 |
a x a |
y a |
x2 |
a |
y2 |
a |
xy |
(27) |
|
|
1 |
2 |
3 |
|
4 |
|
5 |
|
|
|
Ототожнення однойменних точок за МНК |
|
|
|
|
|
|
||||
Цей метод грунтується на застосуванні наступного рівняння: |
|
|
||||||||
f1 x, y f2 x p, y q n |
|
|
(28) |
|||||||
тут x,y – координати точки на лівому знімку; p – повздовжій паралакс; |
q – поперечний |
|||||||||
паралакс; n –різниця шумів лівого і правого зображень: |
|
|
|
|
|
|
||||
n n1 x, y n2 x p, y q |
|
( 29) |
||||||||
Враховуючи, що p та q не змінюються в межах еталонної матриці (фрагмента зображення довкола вимірюваної точки) можна їх знайти з розв’язку рівнянь (28), які складають для кожного пікселя фрагментів зображень. Рівняння (28) є нелінійними відносно невідомих. Тому переходять до лінійним рівнянь поправок:
A2 L V , |
(30) |
де A2 – матриця часткових похідних від правого знімка по паралаксах; |
- поправки до |
невідомих; L – вільні члени (значення функції (28), оозраховані за наближеними значеннями невідомих); V – нев’язки рівнянь. Тобто:
15
16
|
|
|
f2i |
|
|
f2i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
i |
|
|
|
|
p |
|
|
q |
|
|||||||
|
|
|
|
|
|
|
|
gx |
gy |
|
|
||
|
|
|
|
|
|
|
........... |
|
|
||||
A |
2 |
................ |
; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
n |
|
|
n |
n |
|
|
||
|
|
|
f2 |
|
|
f2 |
|
|
gx |
gy |
|
|
|
|
|
|
p |
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
p |
|
|
i |
f |
|
i |
|
|
|
; |
f1 |
2 |
|
. |
|||||
|
|
L ........... |
|
||||||
q |
|
|
|
|
|
|
|
||
|
|
n |
|
|
n |
|
|||
|
|
|
f |
|
|||||
|
|
|
f |
2 |
|
|
|||
|
|
|
|
1 |
|
|
|
||
i 1 n , де n - кількіcть пікселів в еталонній матриці; gx , gy – складові градієнта другого зображення в пікселі i.
Розв’язок відшуковують так
AT A |
1 |
AT L |
(31) |
|
|
||||
2 |
2 |
|
2 |
|
Цей метод дозволяє знайти паралакси з точністю 0.01 пікселя. Однак він має і суттєвий недолік – необхідність знання початкових наближень паралаксів з достатньою точністю і виконання доволі великого числа наближень. В якості початкових наближень, як правило, використовують значення паралаксів, отриманих по методу кореляції. Для зменшення затрат машинного часу можна замінити A2 на A1, що дозволити розрахувати градієнти тільки один раз, а від наближення до наближення будуть змінюватись тільки вільні члени L. Як показала практика, така заміна не призводить до зниження точності вирішення задачі.
Цей метод може бути розширено за рахунок включення у вхідне рівняння членів, котрі враховують геометричні і фотометричні шуми двох фрагментів зображень. Як правило для врахування різниць геометричних спотворень двох зображень використовують афінні перетворення:
x1 |
a0 |
a1x2 |
a2 y 2 |
(32) |
|
y1 b0 b1x2 b2 y |
|
||||
2 |
|
||||
а для різниць фотометричних спотворень застосовують лінійне перетворення:
f1 k 0 k1f2 |
(33) |
Крім того, деякі автори розширюють модель даного методу за рахунок включення у вхідне рівняння рівнянь колінеарності, що дозволяє виконати ототожнення відразу для множини однойменних точок, враховуючи не тільки фотометричну відповідність точок, але й геометрію фотограмметричної моделі.
Проблеми стереоототожнення відповідних точок на знімках
Основні причини невірного вимірювання знімків:
•Недостатнє перекриття між знімками;
•Можливе переміщення об’єкта відносно фону;
•Недостатоня кількість деталей на поверхні об’єкта зафіксованих камерою;
•Високий рівень розмиття чи шуму на вхідних знімках.
Для виправлення ситуації в кожному конкретному випадку виконується втручання оператора з візуалізацією точок.
16