

-
Принцип действия гирокомпаса с косвенным управлением.
Рис. 3.2, на котором представлена схематическая модель гирокомпаса с косвенным управлением. Чувствительный элемент, включающий ротор 1 и гирокамеру 2, выполнен как астатический гироскоп. Две степени свободы (по углам α и β) ему обеспечивает система карданового подвеса, образованного вертикальными кольцами 3 и 4. На цапфе 5 гирокамеры, центрирующей ось Y — Y подвеса гироскопа, установлен индикатор горизонта 8. При появлении угла подъема β главной оси ОХ гироскопа над
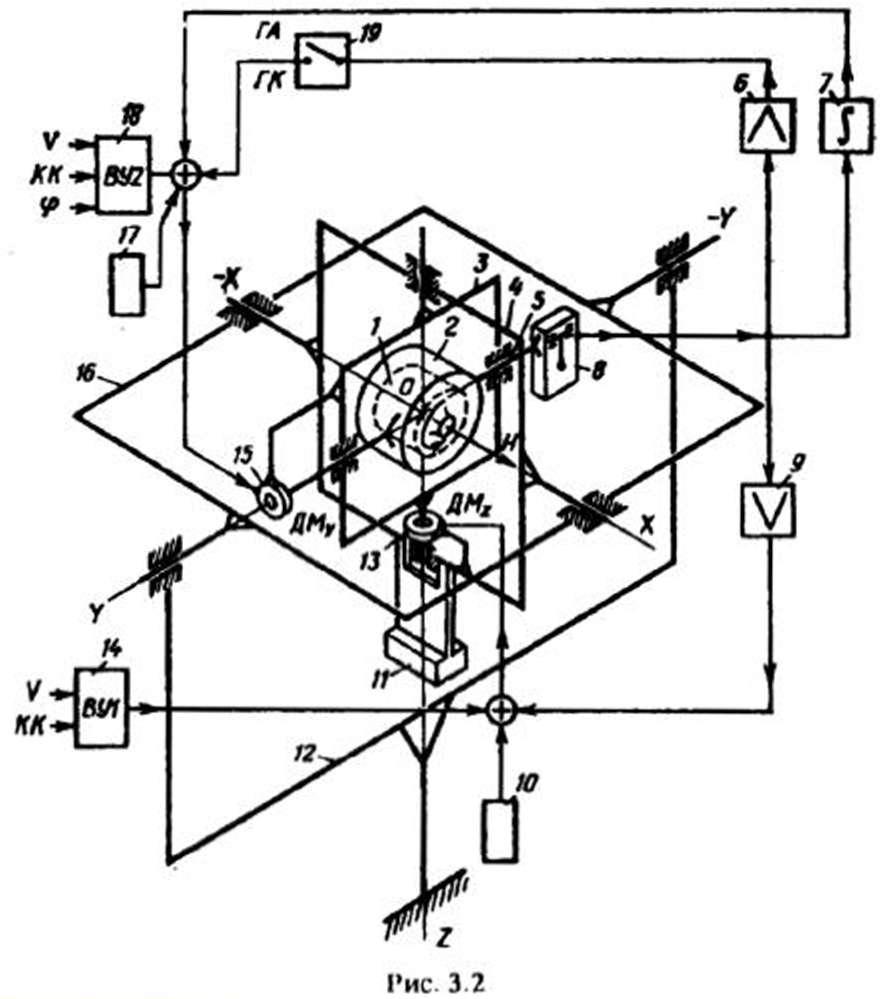
плоскостью горизонта индикатор горизонта вырабатывает сигнал в виде напряжения электрического тока, пропорционального этому углу. Пройдя усилитель 6, сигнал поступает на датчик момента электромагнитного типа 15, создающий момент вокруг горизонтальной оси Y— Y гироскопа. В результате к гироскопу будет приложен момент, определяемый зависимостью Ly = Ayβ где Ау— модуль горизонтального момента. Указанный момент с принципиальных позиций является полным аналогом маятникового момента в гирокомпасе с непосредственным управлением Ly = Bβ. Известно, что такой момент придает гироскопу компасные свойства, обеспечивая движение его главной оси в режиме незатухающих колебаний относительно положения динамического равновесия, расположенного в плоскости истинного меридиана (αг = 0) и отклоненного на угол βr от плоскости истинного горизонта.
Существует еще один канал распространения сигнала индикатора горизонта по линии: индикатор горизонта 8, усилитель 9, датчик вертикального момента 13. Этот момент предназначен для демпфирования колебаний чувствительного элемента. Затухание колебаний может быть достигнуто путем введения момента, действующего по той же оси, что и маятниковый момент Ly = Bβ, но с отставанием от него по фазе на π/2. Покажем, что введение дополнительно к горизонтальному моменту Ly = Ayβ еще вертикального момента, пропорционального углу β, т.е. определяемого зависимостью Lz = Azβ, где Az — модуль вертикального момента, также обеспечивает демпфирование колебаний. Иначе говоря, требуется доказать, что действие момента, ортогонального по направлению и изменяющегося синфазно по времени, (по отношению к моменту Ly), эквивалентно действию момента, коллинеарного по направлению, но изменяющегося во времени квадратурно, т. е. со сдвигом по фазе на π/2β.
Итак,
предположим, что в результате вращения
плоскости горизонта появился угол
β и, следовательно, возник горизонтальный
момент
 ,
являющийся
основным. Этот момент вызовет прецессию
по углу
α
с угловой скоростью
,
являющийся
основным. Этот момент вызовет прецессию
по углу
α
с угловой скоростью
 .
Одновременно появится вертикальный
момент
.
Одновременно появится вертикальный
момент
 ,
который вызовет прецессию по углу β с
угловой скоростью
,
который вызовет прецессию по углу β с
угловой скоростью
 .
В результате существования угловой
скорости прецессии
.
В результате существования угловой
скорости прецессии
 появится дополнительная составляющая
угла β, не являющаяся результатом
вращения плоскости истинного
горизонта. Значение этого дополнительного
угла βдоп
может быть получено как интегральное
значение от угловой скорости прецессии
появится дополнительная составляющая
угла β, не являющаяся результатом
вращения плоскости истинного
горизонта. Значение этого дополнительного
угла βдоп
может быть получено как интегральное
значение от угловой скорости прецессии


Углу
βдоп
соответствует
дополнительный момент

Таким
образом, в рассматриваемом случае вокруг
оси ОY
чувствительного элемента одновременно
действуют: основной момент
 и
дополнительный момент
и
дополнительный момент
 Считая,
что угол β изменяется по известному
закону незатухающих колебаний
Считая,
что угол β изменяется по известному
закону незатухающих колебаний
 ,
получим следующие функциональные
зависимости:
,
получим следующие функциональные
зависимости:

Сравнение
выражений для моментов
 и
и
 указывает на то, что второй из них по
указывает на то, что второй из них по
отношению
к первому имеет сдвиг по фазе на
π/2
в сторону отставания, что и требовалось
доказать (см. графики на рис. 2.18,
б
и
в). Необходимо
обратить внимание на еще одно важное
обстоятельство. В условиях, когда
действуют два момента
Ly
и
Lz
и, следовательно, непрерывно существуют
два прецессионных движения со скоростями
 и ωz,
положение статического равновесия
главной оси гирокомпаса принципиально
не может находиться точно в плоскости
истинного меридиана, так как в этом
случае значение угла β превышало бы его
единственно возможное значение
и ωz,
положение статического равновесия
главной оси гирокомпаса принципиально
не может находиться точно в плоскости
истинного меридиана, так как в этом
случае значение угла β превышало бы его
единственно возможное значение
 .
По этой причине главная ось гироскопа
будет вынуждена отойти к востоку на
такой угол, при котором угловая скорость
опускания главной оси, являющаяся
угловой скоростью прецессии под
действием момента
Lz
=
Az
.
По этой причине главная ось гироскопа
будет вынуждена отойти к востоку на
такой угол, при котором угловая скорость
опускания главной оси, являющаяся
угловой скоростью прецессии под
действием момента
Lz
=
Az в точности
в точности
уравнивалась
бы угловой скоростью
 видимого подъема главной оси над
плоскостью горизонта. Образуя равенство
видимого подъема главной оси над
плоскостью горизонта. Образуя равенство
 где
где
 ,
и развертывая значения
,
и развертывая значения
 ,
получим:
,
получим:

Отсюда найдем значение угла, который определяет девиацию затухания, или широтную девиацию гирокомпаса:

При движении объекта с постоянной скоростью и постоянным курсом в гирокомпасе с косвенным управлением, как и в любом гирокомпасе, неизбежно возникнет и скоростная девиация, характеризующаяся следующей зависимостью,

Обратимся вновь к модели компаса, изображенной на рис. 3.2. Выделим группу элементов: гироскоп, включающий ротор 1 и камеру 2, кольца подвеса 3,4 и датчики момента 13 и 15. Все вместе взятые они образуют гироблок, который жестко связан с разбалансированной массой 11 и подвешен с помощью второй системы кардановых колец 12 и 16 таким образом, что он приобретает положительный маятниковый эффект, т.е. становится физическим маятником. Смещение центра массы в данном случае будем обозначать символом h (не следует путать с маятниковым эффектом гироскопа, который в данной схеме отсутствует). В результате при статическом (или сравнительно медленно изменяющемся) угле крена основания датчики моментов 13 и 15 будут налагать моменты вокруг осей, достаточно близких соответственно к горизонтальной и вертикальной осям.
Следовательно, в рассматриваемой схеме гирокомпаса с косвенным управлением, так же как и в схеме компаса с непосредственным управлением (см. рис. 3.1), стабилизированным элементом служит гирокамера и ее стабилизация вокруг двух осей является силовой гироскопической (по углам α и β) и вокруг третьей оси – маятниковой (по углу ψ).
Как было установлено, гирокомпас с косвенным управлением, когда он находится на объекте, движущемся с постоянной скоростью и постоянным курсом, имеет в азимуте положение равновесия, определяемое девиацией затухания δ𝝋 и скоростной девиацией δV. По высоте положение равновесия определяется углом βг.
С общих позиций логично предположить, что, располагая внешней информацией о скорости судна, его широте и курсе (последний берется с самого гирокомпаса через азимутальную следящую систему, не показанную на рис. 3.2), можно с помощью вычислительных устройств 14 и 18 аналогового или цифрового типа рассчитать необходимое значение корректирующих сигналов, которые, будучи поданными на датчики моментов 13 и 15, окажут такое непрерывное воздействие на чувствительный элемент гирокомпаса, которое принудит его изменить свое положение равновесия и расположиться в идеальном случае точно в плоскости истинного меридиана и точно в плоскости истинного горизонта. Может возникнуть закономерный вопрос: какое преимущество имеет гирокомпас, скоростная девиация которого исключается из показаний чувствительного элемента путем корректировки его положения, по сравнению с вариантом гирокомпаса, указанная девиация которого устраняется только в показаниях репитеров, а чувствительный элемент не подвергается каким-либо корректирующим воздействиям? Как будет ясно из дальнейшего аналитического рассмотрения поведения корректируемого гирокомпаса, указанное различие имеет фундаментальный характер и проявляется в том, что у корректируемого гирокомпаса появляется принципиально новая и весьма эффективная возможность повышения точности его показаний на маневрировании. Применение в схеме компаса датчиков моментов электромагнитного типа позволяет решить еще одну задачу, которая так и не была решена в гирокомпасах с непосредственным управлением, а именно: компенсировать с помощью соответствующих сигналов влияние вредных моментов, которые действуют по осям чувствительного элемента и являются результатом главным образом технологических недостатков его изготовления. Устройства, вырабатывающие компенсирующие сигналы, обозначены позициями 10 и 17. В гирокомпасе «Вега-М» введен блок интегратора И, который предназначен для снижения величины дрейфа гироскопа вокруг оси Z-Z и используется совместно с устройством компенсации 17.