

Билет № 16
Ограждающая и ведущая линии положения, выбор, примеры, оценка точности.
Ведущая линия положения.
Ведущая изолиния, или линия положения (ВЩЛП), служит для непрерывного оперативного контроля за движением судна по ЛЗП с помощью измерения (контроля) только одного навигационного параметра (ведущий створ, ведущий пеленг, ведущая гипербола и др.).
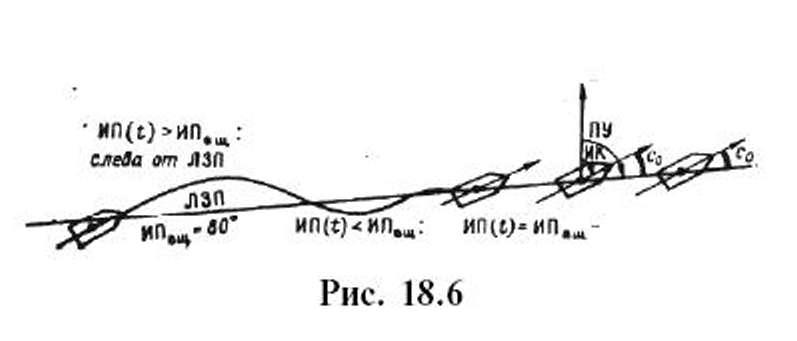
Путь судна выбирается совпадающим с ВЩЛП (рис. 18.6). При этом должна обеспечиваться надежная непрерывная наблюдаемость ориентира на курсе (недопустима смена ВЩЛП в момент прохода вблизи навигационной опасности). Снимается с карты или рассчитывается ведущее значение навигационного параметра (ИПВЩ = 80° на рис. 18.6), его значение надписывается на карте; устанавливается закон изменения навигационного параметра в зависимости от стороны смешения судна с ЛЗП (например, при сносе с ЛЗП вправо пеленг на ведущий ориентир по носу будет уменьшаться).
При подходе судна к данному участку необходимо заблаговременно обнаружить и надежно опознать ведущий ориентир, по мере приближения к ВЩЛП начать контроль навигационного параметра, лечь на ведущую изолинию и путем небольших подворотов добиться, чтобы отсчет навигационного параметра был постоянным и равным заданному значению:
U(t) = U зад = const. (18.54)
После того как судно начнет устойчиво следовать по ЛЗП, можно получить фактический угол суммарного сноса
С0
=
ПУзад
- ИК
=
 - ИК ,18.55)
- ИК ,18.55)
где
 =
ПУзад
-
направление ведущей изолинии.
=
ПУзад
-
направление ведущей изолинии.
СКП ведущей линии положения:
Подставив эту величину в формулу (18.29), можно оценить ширину полосы движения судна при плавании по ведущей изолинии, а по
формулам
(18.43) и (18.44) при
 =
= -
требуемую ширину фарватера
-
требуемую ширину фарватера
Таким образом, ВЩЛП позволяет провести судно по ЛЗП с непрерывным контролем бокового смешения, без каких-либо расчетов или построений, что позволяет оперативно реагировать на появляющийся снос и не допускать значительных отклонений судна от ЛЗП. Недостатком является неопределенность положения судна вдоль ЛЗП, что требует применения других методов контроля (особенно при подходе к повороту).
Ограждающая линия положения.
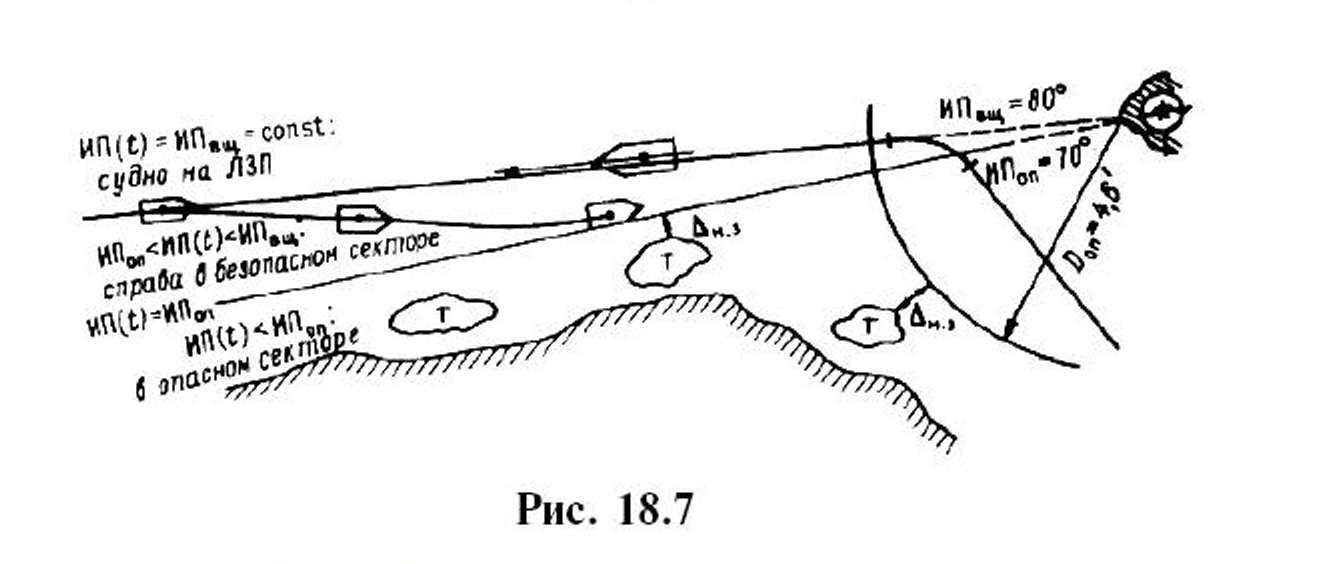
Ограждающая изолиния, или линия положения (ОЛП), служит для непрерывного оперативного контроля за положением судна относительно кромок фарватера или навигационных опасностей путем измерения (контроля) только одного навигационного параметра 1 (рис. 18.7).
Тем самым оперативно контролируется предел безопасного отклонения судна от ЛЗП под воздействием гидрометеорологических факторов или при расхождении с другими судами. Примерами ОЛП являются щелевой створ, секторный огонь (с разным цветом огня в опасных и безопасных секторах), ограждающая изобата и др.
При выполнении предварительной прокладки ОЛП выбирают таким образом, чтобы:
выбранный ориентир заблаговременно обнаруживался, надежно опознавался и мог непрерывно наблюдаться в течение всего требуемого времени;
один и тот же метод и ориентир использовались бы для контроля и ВШЛП и ОЛП;
ОЛП была параллельна или почти параллельна ЛЗП;
ОЛП проходила с некоторым навигационным запасом (ΔНЗ) от границ
навигационной опасности (в зависимости от предельных погрешностей ОЛП, стесненности судоходного пространства, степени изученности района);
ОЛП обеспечивала необходимую быстроту, точность, надежность и однозначность контроля.
Выбранная ОЛП прокладывается на карте; снимается с карты или рассчитывается ограждающее (опасное) значение навигационного параметра (ИПоп = 70° на рис. 18.7), устанавливается закон изменения параметра в зависимости от величины смещения судна с ЛЗП. При следовании данным участком плавание судна осуществляется по ведущей изолинии; однако если возникает необходимость отклонения от ЛЗП - например, при расхождении с другим судном, - начинается контроль ОЛП с тем, чтобы в любой момент времени контролировать безопасность такого отклонения и его допустимый предел.
Погрешности лагов и их устранение.
Гидроакустические доплеровские лаги.