

ИЭ / 6 сем (станции+реле) / Полный текст лекций
.pdfТо есть, если АПВ неуспешно, то оно добавляет проблему в виде дополнительной площадки ускорения и виде дополнительной энергии, которую необходимо рассеять. Неуспешное АПВ ухудшает процесс с точки зрения устойчивости энергосистемы. На рисунке площадка ускорения выделена красным, площадка торможения – синим цветом.
АПВ оперирует выключателями. Выключатели – это элементы, которые предназначены для того, чтобы их включали/отключали по несколько раз. Поэтому этот метод АПВ очень приветствуется. Если АПВ успешно, то мы возвращаемся в ту же точку устойчивого равновесия, в которой начался переходный процесс.
АПВ одноцепной линии
Рассматривается схема генератор – трансформатор – линия – ШБМ. Здесь только одна линия. КЗ происходит на этой линии. Мы находились в точке 1, после КЗ мы упали на АР к точке 2. Из-за того, что Pm – Pe > 0 по АР движемся в сторону больших углов к точке 3: до того момента, когда происходит отключение линии. Тогда у нас после срабатывания РЗ обрывается передача мощности между генератором и ШБМ. То есть, характеристика Ре ПАР обращается в 0, и мы будем в точке 4 на характеристике ПАР. При этом Pт будет такой же. Так как Pm – Pe > 0 по ПАР движемся в сторону больших углов к точке 5 до окончания паузы АПВ. Канал КЗ затух. После чего мы снова включаем линию (связь между генератором и ШБМ восстановлена) и движемся вверх к характеристике НР к точке 6. Затем, движемся в сторону большего угла, чтобы рассеять накопившуюся энергию.
Рисунок 52
Еще одним видом противоаварийной автоматики являются различные виды торможения ротора. Есть последовательное торможение ротора и параллельное торможение.
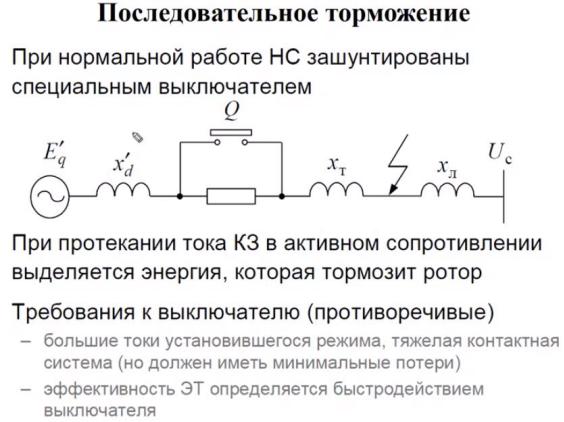
Последовательное торможение
Рисунок 53
КЗ происходит после трансформатора в начале линии. Ставится специальное устройство, представляющее собой резистор и выключатель (он типа сверху от резистора). В нормальном режиме выключатель замкнут, то есть связь идет через Q (резистора как будто нету, он шунтирован). Но если происходит КЗ, мы отключаем выключатель Q (расшунтируем резистор) и получается, что у нас связь генератора с системой (ШБМ) будет через этот резистор. Этот резистор равен в районе 0,1…0,3 о.е. Когда мы добавляем резистор, то точка, где у нас находится напряжении генератора, она находится сразу за Xd на схеме. И если Q отключен, то у нас еще большее напряжение начинает падать и на трансформаторе и на резисторе торможения. За счет этого характеристика аварийного режима (АР) поднимается. Также стоит отметить требования к выключателю (они написаны на картинке).
Минимальные потери выключателя – это потому что в нормальном режиме через выключатель постоянно будет протекать ток генератора.
Моментно-угловая характеристика работы последовательного торможения. Мы находились в точке а. Произошло КЗ. Упали на характеристику АР в точку b. Начинаем двигаться к точке с (потому что машину тянет в сторону увеличения угла). Потом включился резистор, то есть КЗ еще не отключилось, но резистор включился. И при действующем КЗ отключился выключатель. Благодаря этому характеристика АР изменилась. Можно сказать, что характеристика этого резистора – это прямая линия. Если это прямая линия, то она прибавляется к характеристике АР и получается линия как на рисунке 54. По сути, характеристика АР смещается вверх на величину МУХ резистора. Почему это справедливо для активного сопротивления? Потому что на активном сопротивлении угол не меняется, и
активный резистор обеспечивает параллельный сдвиг вот этой характеристики. Перешли на характеристику результирующего АР и продолжаем двигаться вправо. Выигрыш заключен в исключении сегмента, выделенного красным на рисунке. Дальше резистор расшунтирован и действует РЗ. Сейчас характеристика ПАР тоже приподнята на величину активного сопротивления. Переходим на характеристику ПАР и начинаем рассеивать накопившуюся энергию. Затем, из точки k переходим в характеристику ПАР без учета резистора (на рисунке синяя линия). После этого идем в сторону меньших углов и устаканиваемся чуть правее точки а.
Рисунок 54
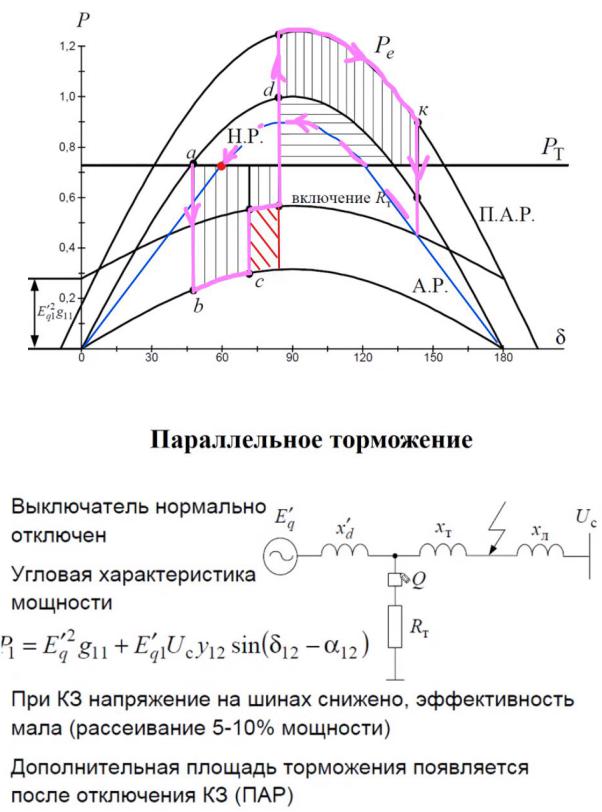
Параллельное торможение
Рисунок 55
Та же самая суть: сопротивление добавляется не после статора, а звездой через землю. Принципиальная разница между последовательным и параллельным торможением: когда торможение последовательно – у нас выигрыш в сегменте площадки ускорения еще до отключения КЗ, то есть во время действия резистора; а при параллельном торможении это не так. Напряжение в точке КЗ просаживается до 0, а включение Rт (включение выключателя Q) пока КЗ не пройдет он не будет поднимать характеристику АР. То есть, этот метод будет действовать только после отключения КЗ. То есть площадка ускорения будет только увеличиваться.
Рисунок 56
Лекция 7 от 05.04.22
Рисунок 57

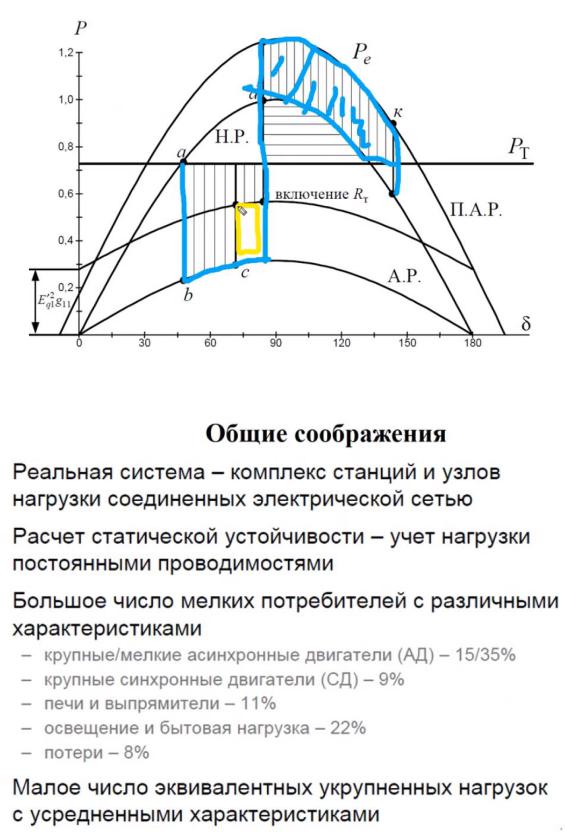
Все, что было до этого – это генерация, распределение электроэнергии (генераторы, трансформаторы, ЛЭП). Вся выработка энергии уходила в ШБМ (то есть, полное потребление энергии). Понятно, что в реальности есть специальные элементы (нагрузки) где это потребление происходит. Но в нашей схеме мы этих элементов не касались. Для полной картины необходимо изучить нагрузки. Начнем мы изучение с асинхронных двигателей.
Асинхронные двигатели
Нагрузки бывают: АД, СД и статические нагрузки (печи, выпрямители, освещение, бытовая нагрузка и потери). Если так считать, то синхронные двигатели мы уже изучали, когда мы брали нашу машину и ставили ему отрицательный момент (потребляет). Тогда наша машина выступала в качестве синхронного двигателя. При этом параметры задаются одинаково. Если нам нужно куда-то поставить СД, мы берем синхронную машину с её параметрами из справочника и просто ставим отрицательный момент. Возбуждение должно быть, и оно должно быть положительное, чтобы СД или СГ работали в энергосистеме. Отличаются только моментом на валу.
Но в большинстве случаев нагрузками являются асинхронные двигатели. Асинхронный двигатель питается, преобразует электрическую энергию в механическую и крутит какой-то механизм, который позволяет вырабатывать электроэнергию на станции. Мы начнем изучать самый неизвестный элемент в энергосистеме. Чтобы был установившийся режим необходим баланс активной и реактивной мощности (сколько энергии вырабатывается, столько же и должно потребляться с учетом потерь).
Мы можем регулировать вырабатываемую энергию (за счет регулятора возбуждения, увеличивая/снижая уставку мы снижаем/увеличиваем напряжение на шинах генератора тем самым регулируем выработку реактивной мощности). За счет регулирования турбины (момента на валу генератора) мы также можем увеличивать/снижать активную мощность. Но нагрузка: сколько потребляется в данный момент – это величина неизвестная (системный оператор не прорабатывает нагрузку каждого компьютера, асинхронного двигателя и т.д.). На узле ставится не каждая нагрузка, а обобщенная. То есть, из-за того, что не моделируется каждый элемент. Выходит, что эта обобщенная нагрузка – очень сильно усредненная. С асинхронным двигателем также – его параметры очень сильно усредненные. Тот узел, где асинхронный двигатель и нагрузка, является самым неточным в энергосистеме (большие погрешности). Тем не менее, что-то рассчитывается.
Реальный АД
Про реальный асинхронный двигатель (маленький по мощности, максимум 30 МВт видел Филимонов). Обычно мощность АД меньше 1 МВт. Мы будем АД и нагрузку ставить
обобщенные на 110 кВ.
Уравнение на рисунке 58 лучше записать через скольжение, либо через скорость:
Если |
(если двигатель остановлен, то скольжение равно 1) |
|
Если |
(если двигатель крутится на номинальных оборотах, то |
) |
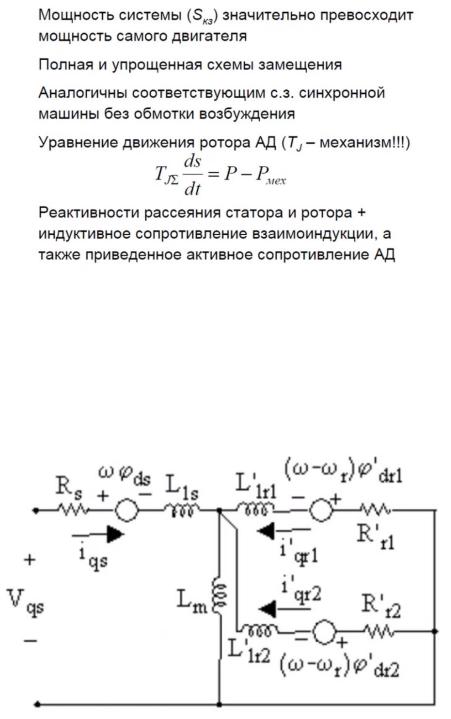
Рисунок 58
– механическая инерционная постоянная агрегата (турбина + генератор). У нас двигатель (синхронный) потребляет энергию из системы и его момент P вращает. На муфте с двигателем стоит какой-то механизм (например винт). И вот этот Pмех в данном случае выступает в качестве тормозного момента (в уравнении движения).
Схема замещения АД полная
Рисунок 59
Всимулинке дано три типа АД:
1.Двигатель с фазным ротором
2.Беличья клетка (короткозамкнутый)
3.Двойная беличья клетка
На схеме (рисунок 59) приведена схема замещения АД с двойной беличьей клеткой. На схеме:
– статор
|
– R, L статора |
|
– внутренний компонент беличьей клетки |
|
– второй компонент беличьей клетки |
Если у нас просто одна беличья клетка, то второй компонент исчезает.
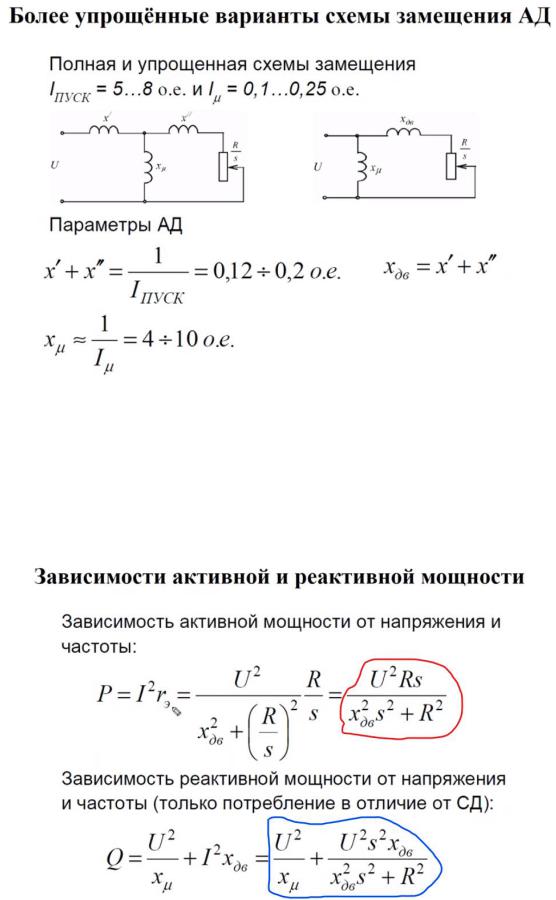
Схема замещения АД упрощенная
Рисунок 60
Упрощенные схемы позволяют примерно оценить сущность АД и вывести некоторые аналитические характеристики. Для упрощения на левой схеме магнитный шунт xμ переносят перед x’ а x’ и x’’ объединяют в xдв, тогда получается правая схема. Анализирую эту схему проще получить зависимость.
Дальше по упрощенной схеме замещения можно сказать, что момент двигателя P (который на рисунке 58) можно найти следующим образом.
Рисунок 61
Можно сказать, что P равно I2 умноженное на r эквивалентное. И если расписать это в соответствии с упрощенной схемой замещения, то мы можем получить формулы, выделенные красным и синим цветом. Все это для схемы справа на рисунке 60.
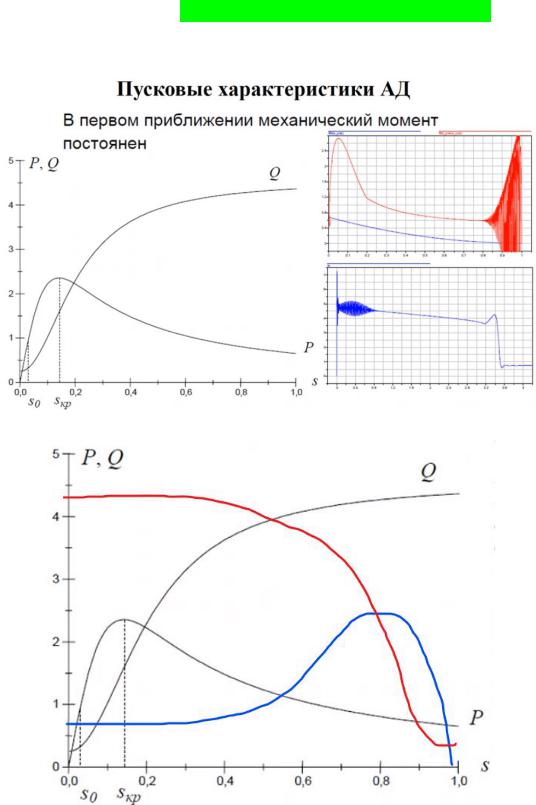
Пусковые характеристики АД
Дальше нужно построить эти зависимости активной и реактивной мощности двигателя от скольжения. Если мы построим моментно-скоростные характеристики (зависимости P, Q от скорости либо от скольжения), разница на самом деле будет небольшой (графики получатся зеркальными).
Рисунок 62
Рисунок 63
На левом графике показана зависимость от скольжения s. Красным и синим цветом показана зависимость от скорости ω (графики отзеркалены относительно вертикальной асимптоты).
Для того, чтобы перейти к рассмотрению пуска АД важны два момента: 1) момент двигателя P; 2) момент механизма (момент того винта). Вначале следует рассмотреть самый простой случай, когда у нас момент механизма нулевой. Питание, выключатель и АД. В какой-то момент времени щелкает выключатель и АД начинает раскручиваться. Как в этом

случае будет происходить пуск? Сначала мы из точки 1 идем в сторону увеличения ω (в
левую, потому что в уравнении |
|
P > Pмех, там где s = 1 ω = 0). Идет разгон |
|
||
АД. Остановимся только тогда, когда |
. Если механизм Pмех = 0, то АД, который |
|
движется со скоростью чуть меньше чем синхронная скорость, выходит в точку ω = 1 и начинает крутиться с синхронной скоростью.
Также, можно запустить двигатель, который уже нагружен (Р > Pмех > 0). В этом случае крутящий момент все равно выше и движение начнется с точки s = 1 в сторону увеличения ω, но медленнее из-за того, что ∆Р меньше. Пуск двигателя происходил бы медленнее. И мы бы вышли в точку, которая находится правее точки нулевого скольжения. То есть, двигатель вышел не на синхронную (3000 об/мин) скорость, а на подсинхронную (2950 об/мин) скорость.
Естественно пуск мог бы происходить до того момента, пока нагрузка на винт не стала как на следующем рисунке:
В этом случае Pмех > Р, двигатель бы не запустился, и оставался бы в точке s = 1. При этом, потребление в районе 4,5 единиц. То есть, он бы потреблял очень много реактивной мощности, а это значит, что он просаживает напряжение. А это значит, что существовал бы пусковой ток, то есть, незапуск АД – это достаточно тяжелый режим для всей энергосистемы.
Следует отметить следующее (рисунок 64). Рассмотрим какой-то режим пуска еще раз. Был ненулевой момент механизма, мы запустились и пришли в точку пересечения Pмех = Р. Допустим, после того, как двигатель уже крутится и ему дали какую-то нагрузку, дали большую нагрузку на механизм (начали нагружать наш двигатель еще больше). У нас в ранней точке небаланс Pмех > Р. Тогда мы переходим в новую точку установившегося режима. Снова начинаем поднимать нагрузку на механизм, и снова переходим в новую точку у. р. Мы можем грузить двигатель до того момента, пока мы не настигнем критической точки.
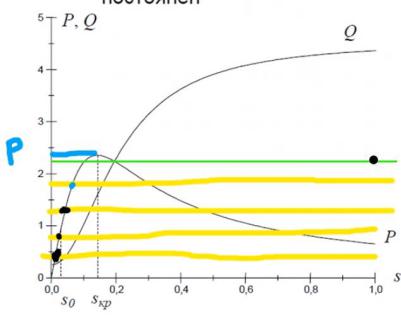
Рисунок 64
Если мы перейдем эту точку, то Pмех > Р и наступает процесс опрокидывания двигателя, то есть он начинает идти в сторону уменьшения скорости ω (вправо, тормозится).
Также, следует отметить следующее (рисунок 64). Допустим, у нас последняя зеленая линия – момент механизма, когда двигатель еще не опрокинулся. Если рассмотреть этот момент, то момент в точке пуска (черная) получится больше чем пусковой момент. То есть, на таком моменте мы бы не запустились изначально. Но, тем не менее, сейчас мы можем работать. Очень часто бывает, что АД пускается ненагруженным, а потом он нагружается до, допустим, зеленого момента (на рисунке). Если механизм позволяет, то идет запуск ненагруженного АД, после чего он начинает постепенно нагружаться. Поэтому это дает нам догрузиться до критического момента, но не сразу.
На рисунке 62 справа показаны расчеты пуска: наверху – моментно-скоростные характеристики, а внизу – зависимость пускового тока от времени. Наверху изображены быстропереходные процессы, которые происходят в беличьей клетке в зависимости от скольжения. Момент механизма изображен на рисунке 62 справа сверху синей линией. Он не прямо по нулю идет, он немножко приподнимается.
Момент механизма
На самом деле, механизм также является неизвестной для нас. Потому что если мы говорим, что мы знаем про модель двигателя всё, то механизм остается для нас неизвестным (это может быть винт, ременная передача и т.д.). Получается, что характеристика механизма в зависимости от механизма может быть разной (опускающейся, прямой или поднимающейся). Поднимающаяся характеристика плоха тем, что тогда пусковой момент должен быть очень большим (это дополнительные мероприятия и регулирования).
Если у нас характеристика механизма спадающая как на рисунке (или прямая или поднимающаяся), то ее можно смоделировать неким полиномом (на рисунке 65). Если мы используем его, то мы можем увидеть, что можно задать любую характеристику вот этого момента. Получается, что эту характеристику момента мы будем подавать на АД. Увидим это при моделировании.