

ИЭ / 6 сем (станции+реле) / Полный текст лекций
.pdfЛекция 5 от 22.03.22
Статическая устойчивость
(1)
(5) |
(6) |
(2)
(3)
(7)
(4)
Рассмотрим разницу между явнополюсной и неявнополюсной машиной. Эта разница видна, если записать уравнение для мощности машины (1), оно получено из уравнения ПаркаГорева. Потокосцепления по оси d и q расписаны в (2) и (3). Получаем выражение для мощности (4). Затем получаем выражение (7). В выражении (7) первая составляющая – это как раз МУХ. Но если обобщить эту формулу, то прибавляется вторая составляющая, которая учитывает Xd и Xq. При этом, эта вторая составляющая существует только для явнополюсных машин. У явнополюсных машин xd и xq отличаются. У турбогенератора xd и xq одинаковые, для гидрогенераторов xd и xq НЕодинаковые. То есть:
МУХ для неявнополюсных СМ МУХ для явнополюсных СМ
Для сравнения построим выражение мощности (7) для явнополюсных и неявнополюсных машин. Если у нас машина явнополюсная, то вторая компонента выражения (7) будет иметь характер синусоиды двойной частоты. Тогда для результирующей МУХ пик (предельное значение) чуть-чуть поднимется. А критический угол смещается от 90° в район 75°…80° и нарушение устойчивости произойдет раньше.

Снижение U на шинах генератора при увеличении передаваемой мощности
При увеличении активной мощности передаваемую через сечение (это делается путем впуска энергоносителя, то есть увеличение момента; это значит для турбомашин мы увеличиваем подачу пара в турбину, для гидромашин увеличиваем поток воды). При этом, мы Eq (величина синхронной ЭДС, то значение которое подается на вход обмотки возбуждения генератора Vf) не меняли.
Увеличение момента турбины Pт это есть поворот Eq. На рисунке U1 – напряжение на шинах генератора, Uc – напряжение сети (не меняется, напряжение на ШБМ), длина Eq не меняется. Именно на прямой между концами векторов Uc и Eq будет конец вектора U1. Чем дальше мы раздвигаем Eq, тем больше увеличиваем момент турбины Pт при сохранении значения Eq, тем у нас больше просаживается напряжение на генератора (U1 становится все меньше и меньше).
ИЛИ можно сказать, что у нас увеличивается реакция якоря. Если мы увеличим впуск энергоносителя, то у нас активная мощность, которая течет по статору, становится больше, а это за счет того, что по статору протекает больший ток. Если ток больше, то он размагничивает нашу систему, то есть он воздействует против обмотки возбуждения. И поэтому происходит просадка напряжения.
Обеспечение постоянства напряжения на шинах статора
Главная задача регулятора возбуждения – это держать напряжение на шинах статора за счет изменения напряжения на обмотке возбуждения. Если регулятор настроен неправильно (поставили ему высокий коэффициент усиления), то это приводит к раскачиванию нашей ЭС (была видна расходящаяся синусоида). В принципе, мы должны действовать так, чтобы до предела передаваемой мощности при нагрузке турбины мы доходили без качаний.
Сейчас рассматривается такой режим, когда у нас напряжения на обмотке возбуждения Eq меняется, а напряжение генератора постоянное. Uc не меняется. АРВ (автоматический регулятор возбуждения) поддерживает постоянным напряжение на шинах генератора U1.

Рисунок 44
При этом МУХ каждый раз меняется. Если регулятор настроен верно и нет самораскачивания, то у нас характеристика моментно-угловой характеристики с учетом АРВ вырождается в линию (сплошная линия). Появляется некий участок ABC – зона искусственной устойчивости. Эта зона является самой главной причиной того, что автоматический регулятор возбуждения сильного действия (АРВСД) искажает характеристику: повышает предел передаваемой мощности и позволяет системе быть статический устойчивой при углах 90°…120°. То есть, она дает нам лишние градусы устойчивости.
Современный АРВ

На рисунке приведена одна из упрощенных моделей. После аварии при применении АРВ затухания колебаний генераторов пройдут быстрее. Есть пять (шесть) каналов регулирования.
Рассогласование напряжения dUg – отклонение уставки от текущего значения поступает
на:
1. Пропорциональный канал 1
2.Пропорциональный канал 2
3.Интегральный канал
δи dIf – каналы системной стабилизации. Демпфируемый угол δ поступает на:
4.Пропорциональный канал 3
5.Пропорциональный канал 4
dIf канал по производной тока ротора поступает на:
6. Пропорциональный канал 5
На рисунке 44 возможность системы быть статически устойчивой при углах 90°…120° появляется благодаря введению последних трех каналов, которые оказывают стабилизирующее воздействие и которые давят все колебания.
Динамическая устойчивость Простой переход (отключении линии)
Рисунок 45
Динамическая устойчивость – это когда у нас происходит сильное возмущение. Включение/отключение линий, включение/отключение мощных нагрузок и КЗ.
В данный момент у нас схема моделирования – это генератор, трансформатор, линия и ШБМ. Чтобы сделать динамический переходный процесс нужно начать с простого перехода, когда у нас отключается одна линия. Допустим, на нашей схеме мы сделаем отключение линии. Получается, что ШБМ изолируются и генератора изолируется в отдельную энергосистему. По сути вопросов устойчивости не стоит, так как устойчивость имеет ввиду устойчивость параллельной работы. Не может быть устойчивости работы одного генератора.

То есть, нам нужно такое возмущение, чтобы после него сохранилась связь между генератором и ШБМ. Ради этого прибавляют еще одну параллельную линию. На модели все возмущения будут на нижней линии:
Простой переход – это когда нормально/аварийно отключается одна из цепей ЛЭП
(нижняя). Какая динамика тогда будет происходить? |
|
|
|
У нас две параллельные |
линии. Характеристика Pe это |
|
. У нас было две |
|
|||
параллельные линии, то есть |
было маленьким, то есть верхняя Pe – это первоначальная |
||
характеристика нормального режима (до аварийного режима). Когда одна линия отключится, у нас станет больше, а амплитуда МУХ станет меньше. Нижняя Pe – это характеристика послеаварийного режима.
Переходный процесс (рисунок 45). Мы находились в точке a. В этой точке у нас был установившийся режим. Потом происходит отключение второй линии. Полный угол δ скачком не меняется. Из точки а мы перейдем в точку b в актуальную характеристику послеаварийного режима.
В точке b: Pт не изменилось, Pe стало ниже. Тогда Pт – Ре > 0, значит d2δ/dt2 > 0. Следовательно, машину тянет в сторону большего угла. Вроде бы в точке с она должна остановиться. Но в участке abc (площадка ускорения) успела накопиться некая энергия, пропорциональная энергии ускорения ротора. В точке с ротор эту энергию еще не успел сбросить. Надо рассеять эту энергию, поэтому он пролетает точку с и двигается до точки d. При этом участок cde (площадка торможения) равен площадке ускорения. После этого из точки d тянет в точку устойчивого равновесия (Pт < Ре, d2δ/dt2 < 0, значит тянет в сторону меньших углов). Потом по той же причине точка опять пролетает точку с, но чуть меньше чем до точки b. И все повторяется, пока она не зафиксируется в точке нового устойчивого равновесия c. С точки зрения энергосистемы, так как угол точки с больше, стало хуже потому что мы приблизились к критическому углу.
Если мы не смогли на площадке торможения рассеять всю накопленную энергию, ты мы будем идти в сторону больших углов до бесконечности. Это означает потеря динамической устойчивости. Графическим критерием динамической устойчивости является:
Вывод: даже при отсутствии КЗ, отключение линии может привести к нарушению устойчивости системы.

КЗ с отключением линии
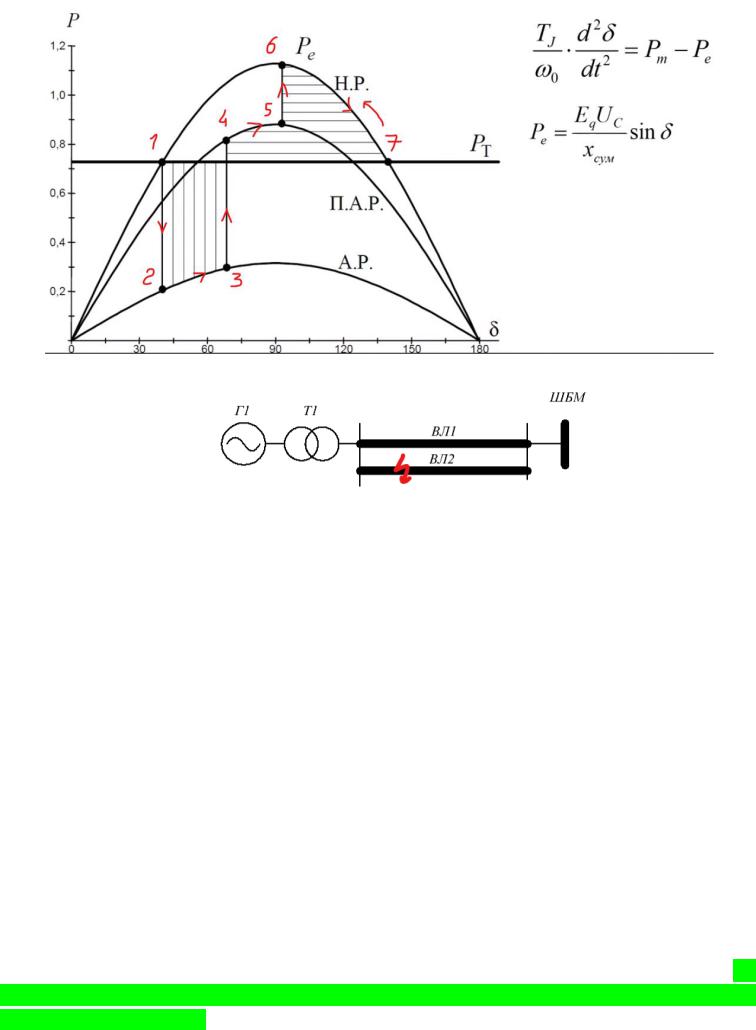
Рисунок 46
НР – нормальный режим, АР – аварийный режим, ПАР – послеаварийный режим.
У нас была характеристика НР, она была актуальной до аварии. Схема модели такая же, как и в прошлый раз:
Происходит КЗ на ВЛ2. Все источники начинают подпитывать точку КЗ. РЗ начинает отрабатывать и отключает ВЛ2 с двух сторон.
До КЗ мы находились в точке 1. Происходит КЗ, и мы переходим на характеристику АР, в точку 2. Характеристика АР находится ниже характеристики НР, потому что при КЗ
просаживаются напряжения |
|
, и возрастают токи. |
||
|
||||
В точке 2: |
|
|
|
мы будем стремиться в сторону больших |
|
|
|
||
углов до тех пор, пока не сработает РЗ (0,1…0,2 сек.), таким образом, дойдем до точки 3 на характеристике АР. Переходим в характеристику ПАР. Характеристика ПАР находится между НР и АР: ниже НР, потому что увеличилось (отключение одной линии), и амплитуда характеристики снизилась; выше АР, потому что после АР напряжения восстановились примерно до тех же значений и амплитуда характеристики увеличилась. Переходим в характеристику ПАР в точку 4.
В точке 4: ротор за все это время накопил энергию в площадке ускорения, и нам надо эту энергию рассеять. Поэтому мы идем в правую сторону по характеристике ПАР до тех пор, пока не рассеем накопившуюся энергию в точке 5 (на рисунке 46 изображен частный случай, необязательно до точки пересечения с Pт). Из точки 5 мы стремимся в сторону меньших углов в новую точку 6 устойчивого равновесия. Но перед остановкой на этой точке мы несколько раз будем идти туда-сюда.

при 3ф КЗ напряжение в точке КЗ просаживается до 0 о.е.
при 2ф КЗ на землю напряжение в точке КЗ просаживается до 0,3 о.е.
при 2ф КЗ напряжение в точке КЗ просаживается до 0,5 о.е.
при 1ф КЗ на землю напряжение в точке КЗ просаживается до 0,7 о.е.
Вслучае 3ф КЗ характеристики НР и ПАР бы не менялись, поменялась бы характеристика АР, она бы была примерно на нуле. Получается, что площадка ускорения была бы гораздо больше, и площадки торможения не могло бы хватить на рассеяние накопившейся энергии. Значит, с точки зрения устойчивости системы 3ф КЗ является самым тяжелым видом.
При этом, |
при 3ф КЗ будет больше, чем |
когда мы рассматривали случай |
||
на рисунке 46. Следовательно, производная |
|
тоже будет больше, а это значит, что угол δ |
||
|
||||
при 3ф КЗ будет расти быстрее, чем в нашем случае. Значит, за время срабатывания РЗ точка 3 будет находиться правее, и площадка ускорения будет гораздо больше.
Лекция 6 от 29.03.22
Динамическая результирующая устойчивость Противоаварийная автоматика
Есть определенные нормативы по отключению КЗ, зависящие от напряжения линий. Но, помимо этого есть резервные защиты, в которых искусственно может вводиться отстройка по времени. Тем самым мы затягиваем время отключения КЗ. В этом случае, если КЗ не отключится действием основных защит, тогда сработают эти резервные защиты, но уже с большей продолжительностью по времени. Тогда получится, что площадка ускорения будет существенно больше, и нам времени на рассеивание энергии на площадке торможения уже не хватит. Соответственно угол будет вылетать до бесконечности, устойчивость параллельной работы будет потеряна. Именно в таких случаях вводят средство противоаварийной автоматики. Средства противоаварийной автоматики позволяют из заведомо неустойчивого режима сохранить устойчивость применением каких-либо мер.
Рисунок 47

Нарушение параллельной работы генераторов может привести к значительному ущербу, потому что оно помимо прочего сопровождается отключением нагрузок. То есть когда у нас происходит нарушение устойчивости параллельной работы, мы можем некоторые нагрузки откинуть.
Аварийные ситуации постоянны и непредсказуемы. На линиях КЗ (аварии) это норма. Исходя из графического принципа определения устойчивости энергосистем, общий
принцип действия нашей противоаварийной автоматики должен быть направлен: либо на уменьшение площадки ускорения, либо на увеличение площадки торможения.
Автоматическое повторное включение (АПВ) линии.
Рисунок 48
На одной линии происходит КЗ. После этого РЗ отключает линию с двух сторон, и в принципе линию после отключения можно включать. У воздушной линии в качестве изоляции служит воздух, то есть когда ветер сдует воздух, то изоляция восстановится. В кабельной линии – совсем не так. Если там КЗ, то изоляция разрушится. В случае кабельной линии АПВ делать нельзя, а в воздушной линии можно.
Не надо включать линию сразу после того как произошло КЗ. Если произошло КЗ, и мы отключили точки подпитки на выключателях, то у нас в течение определенного времени идет процесс, когда заряд с емкостей на землю и с емкостей междуфазных сливается в воздушный промежуток. То есть, происходит процесс разряжения емкости линии – деионизация дугового канала. И время, пока разряжается емкость линии, равно 0,2…0,35 сек. Иными словами, после отключения источников подпитки у нас сама линия еще какое-то время выступает в роли источника подпитки КЗ, и только тогда, когда ее канал разрядится, можно повторно включить эту линию. Это время (пауза АПВ) зависит от стекающей емкости, от заряда. Получается, чем больше емкость, тем больше время, в течение которого происходит деионизация дугового канала. А емкость больше, если линия длинная, если линия на более высоком напряжении.
ОАПВ – однофазное АПВ, ТАПВ – трехфазное АПВ. Дело в том, что в выключателе есть возможность выбора отключающей/включающей фазы: однофазный привод, либо общий привод для всех фаз. Это связано с тем, что если мы отключаем всю линию, то характеристика АР просядет сильнее, а если оставим две фазы, то по этим двух фазам мощность будет идти.
Модель АПВ двухцепной линии
Рисунок 49
Мы находимся на точке 1 характеристики НР. Происходит КЗ (скорее всего не 3 фазное). Мы перемещаемся вертикально вниз (угол не меняется скачком) на характеристику АР (снизилось потому что упало напряжение) в точку 2. Дальше, анализируя Pm – Pe, узнаем, что мы движемся в сторону больших углов в точку 3 до тех пор, пока существует КЗ (пока еще РЗ не сработала). В точке 3, где мы успели накопить определенную площадку торможения, срабатывает РЗ и отключает линию по двум концам. После этого, мы идем в характеристику ПАР (ниже чем НР, потому что при отключении линии Xсум стало больше) в точку 4. Мы не идем в сторону меньшего угла, потому что мы накопили площадку ускорения, которую необходимо рассеять. Поэтому движемся по характеристике ПАР в сторону большего угла в течение паузы АПВ до точки 5 (считается, что АПВ прошло успешно). Соответственно, мы переходим на характеристику НР в точку 6. И продолжаем рассеивать накопившуюся энергию (в сторону большего угла) по характеристике НР до точки 7 (на рисунке 49 тоже частный случай). Потом, так как Рт – Ре < 0, будем двигаться в сторону меньших углов. Перед тем, как установиться в точке 1 мы несколько раз будем колебаться туда сюда, и затем остановимся в точке 1 – точке устойчивого равновесия.
Рассмотрит АПВ с точки зрения противоаварийной автоматики. Почему это работает, почему это помогает нашей системе?
Это помогает благодаря выделенному синим цветом участку (рисунок 50). Он прибавляется к площадке торможения. То есть если бы мы не применили АПВ, то площадка торможения была бы только на участке, выделенном черным цветом (рисунок 50). Но благодаря тому, что мы использовали АПВ, у нас потенциальный сегмент площадки торможения стал больше.

Рисунок 50
Неуспешное АПВ
АПВ было бы неуспешным в том случае, если бы на нижней линии КЗ не прошло после включения линии. Такое случается, например, когда линию случайно задел какой-нибудь кран и т.п. МУХ: мы бы также из точки 1 спустились на точку 2, затем также перешли бы в точку 3 до КЗ, также поднялись бы наверх до точки 4. Потом также пошли бы по характеристике ПАР к точке 5 при паузе АПВ. После чего, мы бы включили линию и спустились бы на линию характеристики АР к точке 6 (рисунок 51), то есть мы бы перешли вниз. И в соответствии с уравнением движения мы бы продолжали двигаться по характеристике АР в сторону больших углов до тех пор, когда РЗ повторно не отключит линию до точки 7. А дальше как настроена автоматика: рано или поздно РЗ отключит линию и повторное КЗ перестанет быть, и мы будем двигаться вверх к характеристике ПАР к точке 8. После этого, мы снова движемся вправо, чтобы рассеять накопившуюся энергию.
Рисунок 51