

ИЭ / 6 сем (станции+реле) / Полный текст лекций
.pdfРассмотрим, как ведет себя система, если она находится в точке b. В ней выполняется условие . Допустим, что-то происходит (у нас по правде не установившийся режим, а квазиустановившийся режим). Что-то нас из этой точки выводит. При этом Pт (турбина) не меняется.
– Допустим, что-то случилось и мы случайно на мгновение перепрыгнули на точку чуть-
чуть выше:
Все то же самое: |
не изменилось, |
– стало больше |
|
будет |
|
отрицательной будет уменьшаться. Сместимся в область меньших углов, до тех пор, пока не дойдем до точки a.
– Допустим, что-то случилось и мы случайно на мгновение перепрыгнули на точку чуть-
чуть ниже:
не изменилось, – стало меньше будет положительной будет увеличиваться. Сместимся в область больших углов и устойчивость будет
нарушаться. |
|
Точка b ( |
) – точка НЕустойчивого равновесия. |
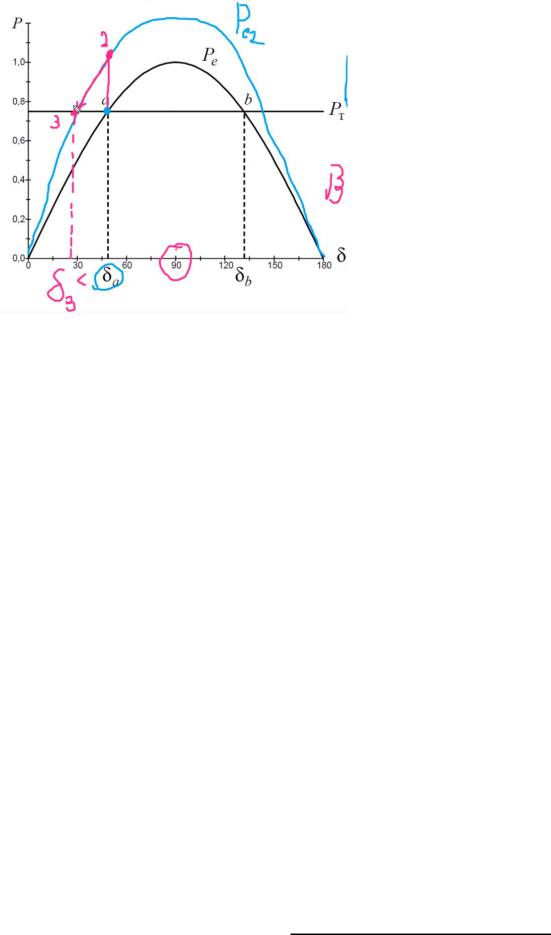
– Допустим, в уравнении МУХ по какой-то причине увеличилось Eq или Uc. Тогда амплитуда функции станет выше (синий график), МУХ Pe поднимется:
Рисунок 36.
Сначала мы были на нижней синусоиде, потом скачком повысилось напряжение (Eq или
Uc). Используем уравнение движения. До скачка было: |
, мы были на угле δа. После |
|||
скачка характеристика |
поднялась в Pe2. |
– не изменился. Следовательно, |
. |
|
Движение точки (угла) режима должно происходить с условием, что угол δ непрерывный (не допускает скачков). Значит, мы какое-то время остаемся на том же угле и мы переходим из точки a в точку 2 на МУХ Pe2 (красный отрезок). Так как , значит δ стремится к уменьшению угла, до точки 3, когда у нас наступит новое равенство моментов. При этом,
. Стало лучше, так как 90° – это критический угол. Чем мы дальше от критического угла, тем мы находимся в более устойчивом состоянии.
Когда в энергосистеме происходит КЗ, увеличивается ток. Есть две причины, когда генераторы выполняют форсировку возбуждения. Поначалу может показаться, что при КЗ нужно уменьшить напряжение обмотки возбуждения. Но так не делается, наоборот, напряжение возбуждения увеличивают в попытке поднять напряжения в узлах (генераторы форсировкой подпитывают точку КЗ). Первая причина: для целей РЗ: для увеличения коэффициента чувствительности РЗ (чем больше ток КЗ, тем точнее РЗ определит, что это КЗ; но, когда режим находится на грани срабатывания, то есть маленький ток КЗ, РЗ может не отключить выключатели). Вторая причина: для целей устойчивости энергосистемы. Дело в том, что при КЗ начинаются проблемы с устойчивостью (энергосистема на грани потери устойчивости). Форсировка возбуждения (увеличение напряжений Eq и Uc) положительно влияет на устойчивость энергосистемы, потому что во всех узлах поднимается напряжение и как на рисунке 35, мы наоборот пытаемся отойти от критической точки (угла). Чем выше напряжение в энергосистеме, тем она более устойчива.
Также, чем мы меньше вырабатываем Pт, тем точка (угол) равновесия будет меньше.
Чем величина вырабатываемой активной мощности PТ меньше, тем система более устойчива.
– Допустим, в уравнении МУХ по какой-то причине увеличилось Xсум. Тогда амплитуда функции станет ниже, МУХ Pe опустится:
Из точки а перейдем в точку ниже (при том же угле δa). |
, следовательно, |
|
мы перейдем по новой кривой Pe в точку 3. |
, стало хуже. Чем сопротивление |
|
между узлами выше, тем устойчивость хуже. |
|
|
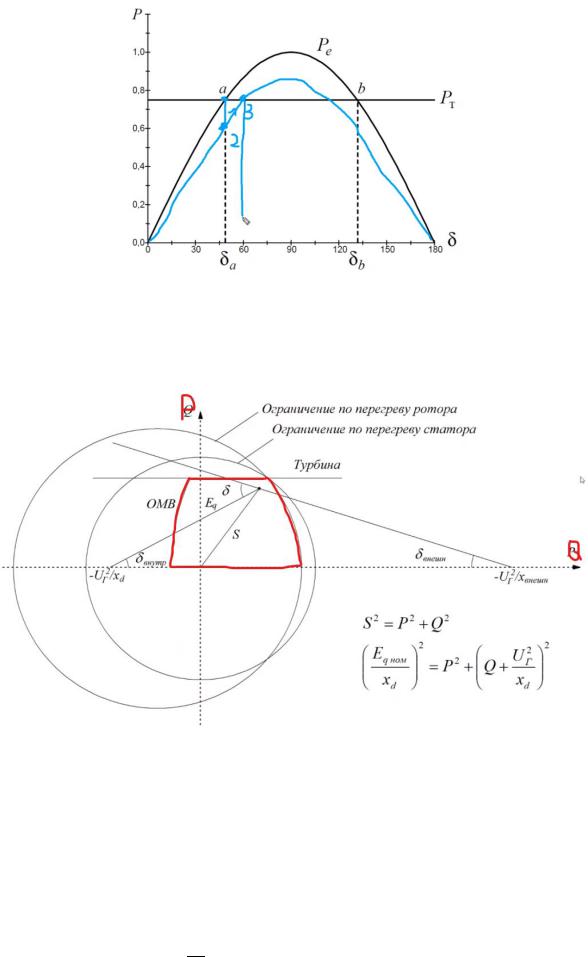
PQ – диаграмма (тоже характеристика)
Рисунок 37
Представим, что это генератор. У нас есть выдаваемые P и Q. Первое ограничение по P: вся нижняя часть (P < 0) исчезает, так как P < 0 не может быть. Второе ограничение по P – у генератора есть турбина, выше которой мощности не хватает.
Ограничения по Q:
1) ограничение по мощности генератора (по перегреву статора): это уравнение окружности с центром в начале координат
2) ограничение по перегреву ротора: второе уравнение на рисунке 36 – это уравнение
окружности с центром в точке
Слева будет ОМВ – ограничение минимального возбуждения. Когда турбогенераторы переходят в режим потребления, у них начинает греться лобовая часть при потреблении
реактивной мощности (Q < 0). Те значения, при котором эти лобовые части греются, не могут быть определены простой формулой.
Если объединить все границы получится сектор (красный). Внутри этого сектора мы можем ставить любую точку режима. То есть мы можем работать на этой области.
Допустим, внутри этого сектора поставили точку режима (черная точка). Это значит, что у нас вырабатывается (или потребляется) какая-то Q и вырабатывается какая-то P. Еще,
можно сказать, что расстояние от центра второй окружности |
|
до нашей точки |
|
выбранного режима описывает величину Eq (величину напряжения возбуждения). То есть, можно сказать, какой ток (напряжение) возбуждения нужен чтобы обеспечить выбранный режим работы.
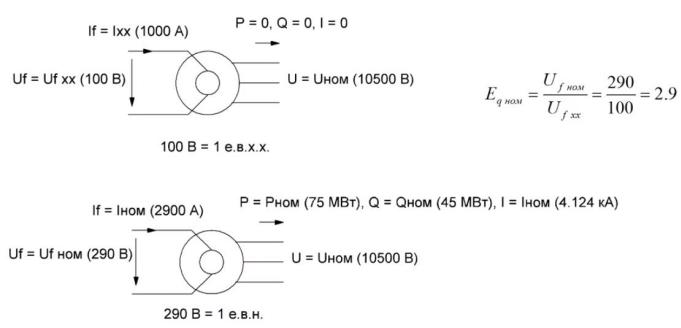
Единицы возбуждения номинальные (е. в. н.) и единицы возбуждения ХХ (е. в. х. х.)
Рисунок 38.
Единицы, в которых измеряются напряжения возбуждения. Проблема заключается в том, что тут две базисные единицы. (Если что, статор – три отрезка справа от круга, обмотка возбуждения – это то, что слева от круга)
Рассмотрим верхний генератор. На статоре – переменный ток 50 Гц, на роторе – выпрямленный ток. Как вводится е. в. х. х.? Если генератор крутится на номинальных оборотах, и при этом не выдает активную и реактивную мощность (P = 0, Q = 0), ток по статору – нулевой (I = 0) и напряжение на статоре равно номинальному значению напряжения (U = Uном), то это значит, что на его ротор выдаются значения, которые характерны единицам возбуждения холостого хода.
Нижний генератор. На статоре – переменный ток 50 Гц, на роторе – выпрямленный ток. Генератор крутится на номинальных оборотах, номинальное напряжение на статоре, но теперь он выдает номинальную активную мощность и номинальную реактивную мощность, при этом ток статора равен номинальному току. В этом случае, на его обмотку возбуждения подается величина, равная 1 единице возбуждения номинальной.
Первый случай возможен когда:статор разомкнут
статор замкнут, но P = 0, Q = 0
Вэтом случае мы на ОВ подали 100 В, ток у нас 1000 А и напряжение у нас стало 10,5 кВ. Тогда спрашивается: почему во втором случае, чтобы напряжение на статоре было 10,5 кВ, нужно подать не 100 В и 1000 А, а 290 В и 2900 А? Потому что у нас течет активная и реактивная мощности и самое главное ток. Если по статору течет ток, то есть реакция якоря. Реакция якоря – это размагничивающая сила.
Лекция 4 от 01.03.22
СНАЧАЛА все в симулинке.
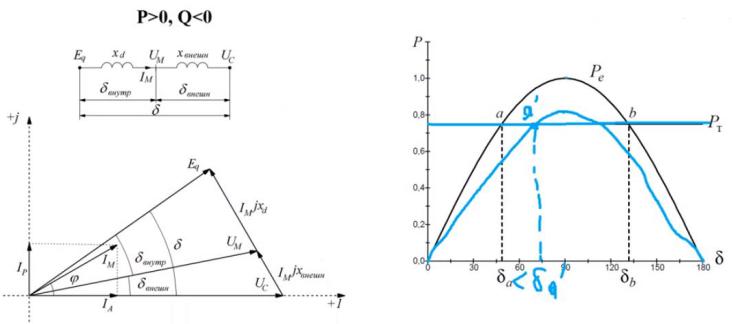
Режим генератора (P > 0, Q < 0)
МУХ в уравнении движения определяет его правую часть. В зависимости от соотношения Mm и Ме возможен тот или иной режим работы.
Но как будет выглядеть МУХ если генератор будет потреблять реактивную мощность (Q < 0). При потреблении реактивной мощности в уравнении Pe: Xсум не меняется, Uс не меняется, Eq – уменьшилось. Если уменьшилось Eq, то в целом амплитуда тоже уменьшилась. Значит, появилась новая величина (линия) электромагнитного момента Pe, значит точка устойчивого равновесия в районе большего угла. Вывод: в режиме потребления реактивной мощности машина менее устойчива.
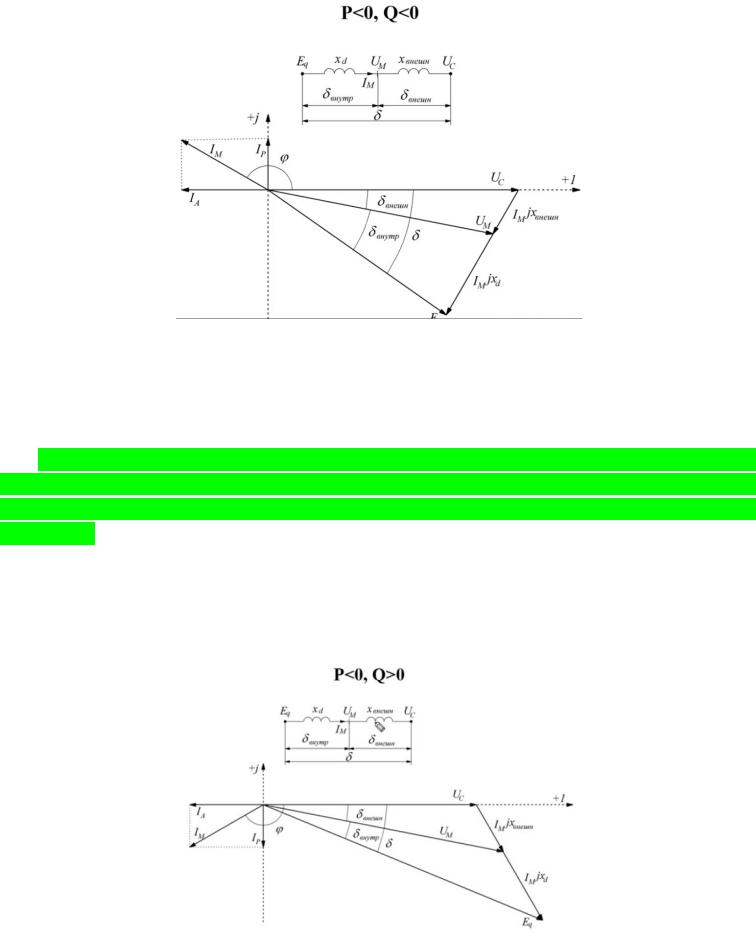
Режим двигателя (P < 0, Q < 0)
Рисунок 39. Векторная диаграмма
В симулинке в библиотеке элементов машина не определяется как синхронный генератор или синхронный двигатель, там просто написано машина. В принципе, причина в том, что машина может быть обратимой. Она может работать как в режиме двигателя, так и в режиме генератора.
Какая разница между режимами двигателя и генератора? Генератор активную мощность только выдает (P > 0), а реактивную может, как выдавать, так и потреблять. Двигатель активную мощность только потребляет (P < 0), а реактивную может, как выдавать, так и потреблять.
На векторной диаграмме: рисуем Uc, рисуем Iм, находим Iм*j*Xвн (поворот на 90°), получаем Uм, находим Iм*j*Xd (поворот на 90°), получаем Eq. При этом можно измерить углы. Каждый следующий вектор получается меньше.
Режим двигателя (P < 0, Q > 0)
Двигатель потребляет активную мощность и выдает реактивную. Также строится векторная диаграмма. Каждый следующий вектор получается больше.
Устойчивость ЭС
Рисунок 40
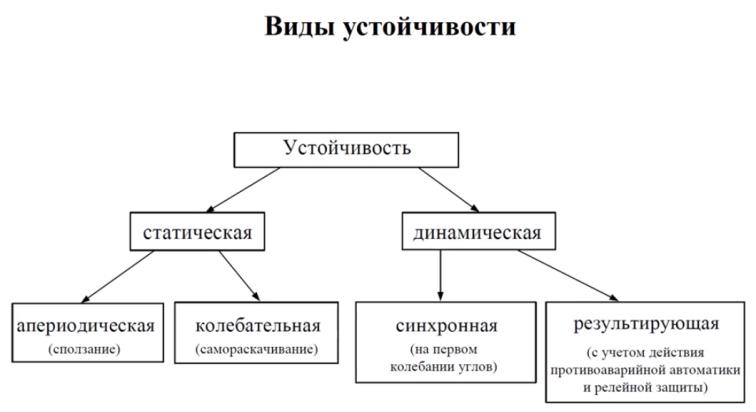
Устойчивость – это способность ЭС возвращаться к установившемуся режиму после каких-либо возмущений. Устойчивость делится на статическую и динамическую. Статическая устойчивость – это способность ЭС возвращаться к установившемуся режиму после небольших (малых) возмущений. Динамическая устойчивость – это способность ЭС возвращаться к установившемуся режиму после больших возмущений.
Статическая делится на апериодическую и колебательную. Динамическая делится на синхронную и результирующую.
–Небольшие возмущения – небольшие сбросы/набросы (мощности, напряжения возбуждения) на турбину. Также, статическая устойчивость имеет место даже при установившемся режиме, потому что ЭС не может быть полностью в установившемся режиме, режим может быть квазиустановившимся (в ЭС всегда что-то включается/отключается). В принципе, эти включения/отключения и являются маленькими толчками, которые происходят постоянно.
–Пример динамической устойчивости (больших возмущений): включение/отключение выключателей (например подключается/отключается линия или нагрузка) и разнообразные КЗ (симметричные, несимметричные). Сбросы/набросы большой активной мощности тоже является примером больших возмущений. Форсировки возбуждения, действия противоаварийной автоматики, включение больших узлов нагрузки, включение больших узлов где находится асинхронная нагрузка и т. д.
Ключевые особенности устойчивости
Рисунок 41
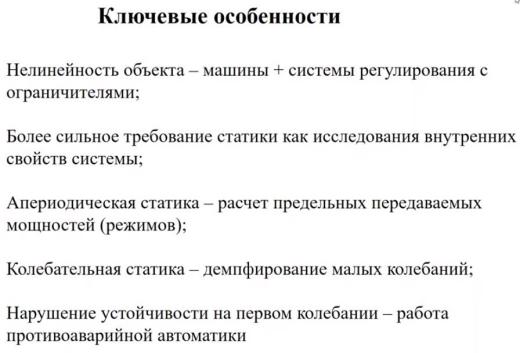
1.Первое, на что стоит обратить внимание: мы устойчивость выражаем численно. Но, у нас нелинейные объекты (машины, системы регулирования, трансформаторы, насыщение элементов и т. д.). Но методы расчетов линейных систем в ТАУ можно использовать если линеаризовать нашу систему. В примере синусоиды: выбрать небольшой участок и сказать, что на этом участке функция линейна.
2.Более сильное требование статики как исследования внутренних свойств системы. Если у нас нету статической устойчивости, то говорить о динамической устойчивость нет смысла. Сначала система должна выйти на прямую линию (встать на режим) и маленькие возмущения не должны выводить её из себя. И только потом можно рассуждать о том выдержит или не выдержит система КЗ и т. д.. То есть, требования статики (статической устойчивости) – первичнее.
3.Апериодическая статика – это расчет предельных передаваемых мощностей. То есть,
участок сети: у нас есть уравнение |
|
(уравнение МУХ для участка сети). Расчет |
|
апериодической статики – это как раз то, что мы делали, анализируя углы (насколько близко наш угол находится к критическому и т. д.). Исследование апериодической статической устойчивости говорит, что у участка сети есть какая-то предельная величина (амплитуда), которая является, по сути, пропускной способностью линии по апериодической статической устойчивости. Самое главное тут –находить предельные величины.
4. В колебательной статической устойчивости самое главное это демпфирование (сглаживание, ослабление, амортизация) малых колебаний. Во время каких-либо флуктуаций в нашей системе есть важный момент – угол δ будет как-то затухать. Затухание переходных процессов может быть разным (долгим или быстрым). Колебательная статика – это изучение свойств системы, где самая главная идея – это сделать так, чтобы колебания были как можно меньше (затухали быстрее).
Собственная частота (электромеханических) колебаний
Рисунок 42
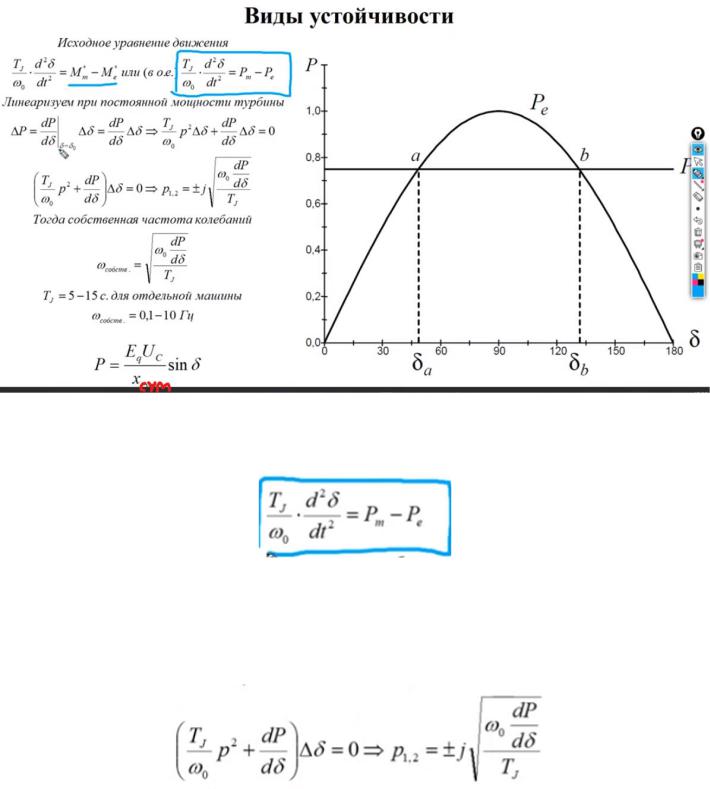
У нас система нелинейная, но ее можно линеаризовать. Возьмем уравнение движения в виде:
и проведем процедуру линеаризации. Для того, чтобы это сделать нам надо взять производную по углу при каком то зафиксированном угле (то есть линеаризация применима только в окрестности точки δ0, только в окрестности конкретного режима и в производную ставится именно это значение δ0). Применим эту линеаризацию к уравнению движения. Вторая производная заменяется на оператор Лапласа, после чего составляется уравнение:
Рисунок 43
Корень получился чисто мнимый, тогда, так как у нас нет вещественной части, все что находится при мнимой части – это собственная частота колебаний (рисунок 41). По сути, мы получили какие частоты имеют место быть. Tj для энергообъединений доходит до 400 секунд.
зависит от Tj: чем больше Tj тем меньше .
Что такое dP/dδ. На графике МУХ dPe/dδ – это касательная для каждой точке Pe. Тангенс угла между этой касательной и осью oX определяет величину этой производной. То есть, в начале координат эта производная будет максимальной (самый большой угол между касательным и оХ), а в точке максимума Pe – минимальной (угол будет нулевым):
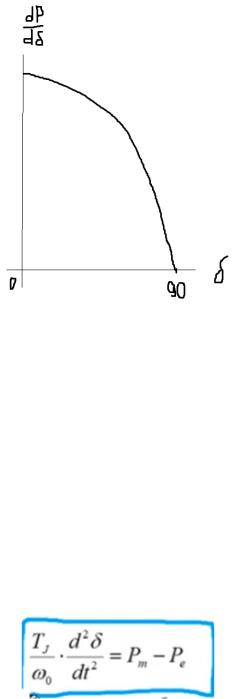
Чем значение dP/dδ выше, тем собственная частота выше. А dP/dδ выше где меньше угол. То есть, если турбина выдает мощность Pт1 > Pт2, то δa1 > δa2 тут собственная частота колебаний при Pт1 будет меньше, а при Pт2 – больше.
Оказывается, что собственная частота электромеханических колебаний в ЭС находится в диапазоне 0,1…10 Гц (вообще 0,1…2 Гц).
Чем меньше частота колебания в ЭС, тем условия в ЭС с точки зрения устойчивости хуже (тем хуже демпфируется). Собственная частота будет меньше, если dP/dδ будет меньше, а самая маленькая dP/dδ – при приближении к углу 90°. То есть, именно по этому проявляются свойства ЭС, если мы видим низкую частоту электромеханических колебаний, значит в каком то сечении, на какой то линии, между какими то генераторами угол близок к 90°. Поэтому лучше чтобы были частоты 1…2 Гц и выше.
В уравнении движения
d2δ/dt2 отвечает за ротор (угол увеличивается или уменьшается, значит ротор ускоряется или замедляется) в зависимости от сочетания Pm и Pe.