

1.7. Элементы теории колебаний материальной точки
Рассмотрим простейшие колебательные движения материальной точки с одной степенью свободы: затухающие, свободные и вынужденные прямолинейные колебания.
Затухающие колебания
П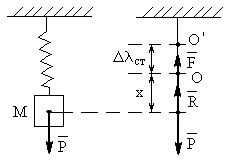 усть
нужно определить закон колебания груза
усть
нужно определить закон колебания груза
![]() ,
прикрепленного к пружине (рис. 6) при
следующих предположениях:
,
прикрепленного к пружине (рис. 6) при
следующих предположениях:
– вес пружины значительно меньше веса груза и им можно пренебречь;
–
Рис. 6
– груз движется по прямой, совпадающей с осью пружины;
– груз можно принять за материальную точку;
– сила сопротивления среды, как следует из опытов, при малых скоростях пропорциональна первой степени скорости. Проекция этой силы на ось имеет вид:
![]() ,
(21)
,
(21)
где коэффициент пропорциональности определяется из эксперимента.
Для
решения задачи воспользуемся координатным
способом определения движения точки,
направляя ось
вдоль пружины. Для упрощения решения
выберем начало координат в точке, в
которой находится движущаяся точка в
тот момент времени, когда силы упругости
пружины равна весу груза. Эта точка
определяет положение
статического равновесия точки
.
Произведем анализ сил, действующих на
точку
в произвольный момент времени. Кроме
сил тяжести
![]() ,
на точку действует сила упругости
пружины
,
на точку действует сила упругости
пружины
![]() (восстанавливающая сила) и сила
сопротивления среды
(восстанавливающая сила) и сила
сопротивления среды
![]() ,
которая направлена против движения
груза.
,
которая направлена против движения
груза.
Согласно
закону Гука, сила упругости пружины
пропорциональна ее удлинению. Коэффициент
пропорциональности
![]() называется жесткостью
пружины. Удлинение пружины состоит из
статического удлинения
называется жесткостью
пружины. Удлинение пружины состоит из
статического удлинения
![]() и динамического удлинения
.
Статическое удлинение соответствует
переходу точки в положение так называемого
статического
равновесия
и динамического удлинения
.
Статическое удлинение соответствует
переходу точки в положение так называемого
статического
равновесия
![]() из положения
из положения
![]() ,
соответствующего нерастянутой пружины.
Проекция силы упругости на ось
равна
,
соответствующего нерастянутой пружины.
Проекция силы упругости на ось
равна
![]() . (22)
. (22)
Дифференциальное уравнение движения точки имеет вид:
![]() ,
(23)
,
(23)
где
![]() .
.
Представим (23) в виде:
![]() ,
(24)
,
(24)
где
![]() ,
,
![]() . (25)
. (25)
Дифференциальное уравнение (24) описывает движение точки в среде с сопротивлением. Это линейное однородное дифференциальное уравнение второго порядка с постоянными коэффициентами. Согласно теории интегрирования таких уравнений, составим характеристическое уравнение
![]() .
(26)
.
(26)
Его корни
![]() .
(27)
.
(27)
Из (27) видно, что возможны три вида корней, а, следовательно, три вида движения точки. Рассмотрим их.
1)
![]() (случай большого сопротивления). Корни
(27) действительные и различные. Общее
решение уравнения (24) имеет вид:
(случай большого сопротивления). Корни
(27) действительные и различные. Общее
решение уравнения (24) имеет вид:
![]() .
(28)
.
(28)
Исследуем
эту функцию. Из (28) следует, что при
![]()
![]() ,
так как
,
так как
![]()
Найдем экстремум этой функции:
![]() ,
,
![]() ,
,
![]() .
.
Отсюда
следует, что если
![]() имеют противоположные знаки, то существует
один экстремум, а если одинаковые знаки,
то экстремума нет. Таким образом, графики
этой функции могут быть изображены
кривыми, представленными на рис. 7. В
этом случае движение точки называется
апериодическим.
имеют противоположные знаки, то существует
один экстремум, а если одинаковые знаки,
то экстремума нет. Таким образом, графики
этой функции могут быть изображены
кривыми, представленными на рис. 7. В
этом случае движение точки называется
апериодическим.
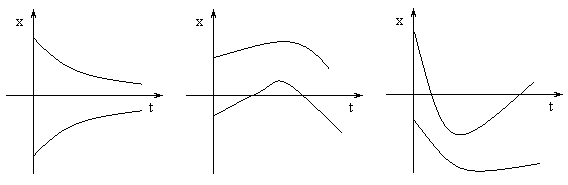
нет экстремума один максимум один минимум
Рис. 7
2)
![]() (предельный
случай).
(предельный
случай).
Корни
характеристического уравнения
действительные и равны:
![]() .
Общий интеграл находится по формуле:
.
Общий интеграл находится по формуле:
![]() .
(29)
.
(29)
Здесь, как и в первом случае, движение апериодическое. Точка с течением времени будет стремиться к положению статического равновесия при любых начальных условиях.
3)
![]() (случай малого сопротивления).
(случай малого сопротивления).
Характеристическое уравнение имеет комплексные корни
![]() . (30)
. (30)
Общее решение уравнения (24) имеет вид:
![]() . (31)
. (31)
Для
придания соотношению (31) удобного для
исследования вида, положим
![]() ,
,
![]() ,
т.е. вместо постоянных
,
введем новые постоянные
,
т.е. вместо постоянных
,
введем новые постоянные
![]() и
и
![]() .
Получим
.
Получим
![]() .
(32)
.
(32)
Постоянные и определяются из начальных условий и называются амплитудой и начальной фазой колебаний точки.
Д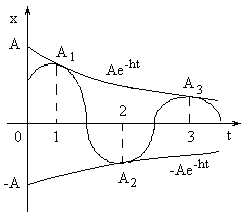 вижение
точки, описываемое уравнением (31) или
(32) называются затухающими
колебаниями.
Графически эти колебания можно
иллюстрировать затухающей синусоидой,
попеременно касающейся кривых
вижение
точки, описываемое уравнением (31) или
(32) называются затухающими
колебаниями.
Графически эти колебания можно
иллюстрировать затухающей синусоидой,
попеременно касающейся кривых
![]() и
и
![]() (рис.8).
(рис.8).
Р
Рис. 8![]() ,
в течение которого точка совершает два
размаха, называется периодом
колебаний. Размахи
колебаний уменьшаются, но отрезки 0-1,
1-2, 2-3, 3-4 и т.д. на оси
,
в течение которого точка совершает два
размаха, называется периодом
колебаний. Размахи
колебаний уменьшаются, но отрезки 0-1,
1-2, 2-3, 3-4 и т.д. на оси
![]() будут равными величинами, т.к. период
не зависит от времени и начальных
условий, что будет доказано ниже. Найдем
экстремумы функции (32), приравнивая ее
первую производную к нулю:
будут равными величинами, т.к. период
не зависит от времени и начальных
условий, что будет доказано ниже. Найдем
экстремумы функции (32), приравнивая ее
первую производную к нулю:
![]()
![]() .
.
Отсюда находим:
![]() ,
,
![]() . (33)
. (33)
Из
(33) следует, что аргументы
![]() ,
,
![]() двух соседних стационарных значений
связаны соотношениями:
двух соседних стационарных значений
связаны соотношениями:
![]()
или
![]() .
.
Т.к.
![]() представляет собой время одного размаха
и является при малом сопротивлении
величиной постоянной, то для периода
колебаний получаем формулу:
представляет собой время одного размаха
и является при малом сопротивлении
величиной постоянной, то для периода
колебаний получаем формулу:
![]() .
(34)
.
(34)
Отсюда видно, что при увеличении сопротивления период колебаний увеличивается.
Для амплитуд получаются формулы:
![]() ,
,
![]() .
(35)
.
(35)
Из (35) находим:
![]() .
(36)
.
(36)
Из
(36) видно, что величина амплитуд образует
убывающую геометрическую прогрессию
со знаменателем
![]() Величина, обратная
Величина, обратная
![]() ,
т.е.
,
т.е.
![]() ,
называется декрементом
затухания.
Эта величина характеризует быстроту
затухания колебаний, т.е. быстроту
убывания координаты
со временем. Величина
,
называется декрементом
затухания.
Эта величина характеризует быстроту
затухания колебаний, т.е. быстроту
убывания координаты
со временем. Величина
![]() называется логарифмическим
декрементом затухания.
называется логарифмическим
декрементом затухания.