

Учебное пособие 800577
.pdfэнергопотребление благодаря тому, что питание подается на обмотки и отключается только в случае необходимости. У этого типа двигателя высокое отношение вращающего момента к моменту инерции и большой пусковой момент, причем проблемы с бросками пускового тока отсутствуют. Эти факторы дают нам сделать выводы, что использование данного вида двигателя в горнодобывающей отрасли это оптимальный вариант.[2]
Однако применение технологии ВИД имеет недостаток, о котором следует знать, для работы ВИД требуется информация о положении ротора. По этой причине ВИД, как правило, должны оснащаться датчиками, что удорожает систему, также повышает вероятность отказа в агрессивной среде. В современных условия при использовании высокотехнологичных DSP-микроконтроллеров стало возможным установить управление ВИД без использования датчиков положения ротора.[3]
Системы управления, основанные на косвенном определении положения ротора, принято называть бездатчиковыми системами. В настоящее время исследователями опубликовано немало работ по синтезу и исследованию бездатчиковых систем управления ВИД. Обычно методы позиционирования ротора принято классифицировать на методы измерения показателей активной фазы и методы, основанные на изменении показателей пассивной фазы. Использование методов первой группы ограничивает возможные алгоритмы управления током активной фазы, а, следовательно, и моментом ВИД. Среди методов, основанных на изменении показателей пассивной фазы, обычно выделяют методы зондирования, основанные на приложении коротких импульсов напряжения. В этом случае возможно применение любого алгоритма управления током активной фазы, однако, необходимо учитывать влияние тока зондирования на показатели энергетической эффективности и на форму кривой момента, если ток соизмерим с током фазы. А если ток зондирования мал и соизмерим с уровнем помех, то необходима защита от помех.
При исследовании ВИМ для ленточных конвейеров был выбран трехфазный ВИД конфигурации 12/14. При математическом моделировании фазы ВИМ приняты следующие допущения: источник питания обладает двусторонней
41

проводимостью; взаимная индуктивность фаз пренебрежимо мала; катушки фазных обмоток имеют одинаковое активное сопротивление и обмоточные данные; воздушный зазор равномерен; вихревые токи в магнитопроводе отсутствуют; силовые ключи преобразователя идеальны. В результате для трехфазной ВИМ составлена система дифференциальных уравнений:
Где In-ток n-й фазы, А; Ldn-дифференциальная индуктивность n-й фазы, Гн; Unнапряжение n-й фазы, В; R - активное сопротивление фазной обмотки, Ом; ω –частота вращения ротора, эл.град; Jпр приведенный момент инерции, кг∙м^2; T_Lмомент сопротивления на валу ВИД, Н∙м; B-коэффициент трения; Tn-электромагнитный момент, производимый током n-й фазы, H∙м; Nrчисло зубцов ротора.
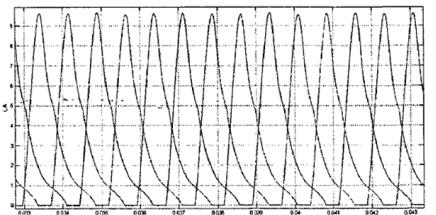
Предварительная картина фазного тока при использовании такого подхода изображена на рис.1.
Рис.1. Предварительная картина фазного тока при использовании алгоритма бездатчикового пуска.
42
Работа алгоритма бездатчикового определения положения ротора при использовании одного зондирующего импульса, а также при использовании силового импульса в качестве зондирующего, подтверждена при различных значениях частоты вращения ротора и при различных алгоритмах управления фазным током математическим моделированием ВИД (Рис.2.).
Рис.2. Результаты математического моделирования ВИД при использовании силового импульса напряжения в качестве зондирующего
Дальше возникает вопрос с выбором управления ВИП. Оптимально для наших задач подходит цифровое векторное управления моментом и скоростью с использованием силовых преобразователей по числу секций двигателя, каждый из которых управляется высокопроизводительным контроллером на сигнальном процессоре с функцией прямого цифрового управления силовыми ключами и сопряжения с датчиками. [1]
Данный вентильно-индукторный электропривод имеет секционную структуру, позволяющую питаться от нескольких независимых источников энергии, что полностью исключает вероятность критической посадки технологических параметров и позволяет выйти на качественно новый уровень надежности
43
ленточных конвейеров при непрерывном производстве. Отсутствие магнитной связи между фазами ВИП позволяет работать каждой фазе независимо от других. Отключение одной и даже нескольких фаз приводит только к пропорциональному снижению выходной мощности и возрастанию пульсации момента, но сохраняет привод в рабочем состоянии. Потеря мощности частично может быть компенсирована увеличением нагрузки на оставшиеся фазы, если имеется надлежащий запас по допустимым токам фаз и силовых ключей.
Сделаем выводы: Вентильно-индукторные привода в настоящее время можно рассматривать как наиболее перспективный вид электромеханического преобразователя энергии. Отсутствие проводников и скользящего контакта на роторе, сосредоточенные катушки статора обуславливают не только высокотехнологиность системы, но и высокие показатели надежности и энергоэффективности. Повышенные показатели надежности вентильно-индукторного привода вкупе с высокой энергетической эффективность позволяют использовать его наиболее тяжелых условиях эксплуатации. Использование алгоритма бездатчикового определения положения ротора будет способствовать не только повышению эксплуатационных показателей привода в условия горно-обогатительного предприятия, но и продвижению электротехнических систем вентильно-индукторного привода на рынке электромеханических устройств.
Литература
1.Новое направление в приводе - мощный много-секционнный вентильно-индукторный электропривод с векторным управлением / В.Н. Остриров, В.Ф. Козаченко, A.M. Русаков и др. // Электронные компоненты. 2006, №11.
2.Крылов Ю.А., Докукин А.Л., Григорьев С.Г. Секционированный вентильно-индукторный электропривод как средство обеспечения бесперебойной работы непрерывных производств // Электро. 2008. №1.
44
3.Пат. 66131. Устройство управления индукторным электроприводом механизма непрерывного действия /А.Н. Ремезов и др. ИБ. 2007. №24.
4.Panda D., Ramanarayanan V. Accurate position estimation in switched
reluctance motor with smooth starting // Industrial Technology 2000: Proceedings of IEEE International Conference. Vol. 1. 2000. Vol. 2. P. 388-
393.DOI: 10.1109/ICIT.2000.854153
Воронежский государственный технический университет
45
Энергетика
46
УДК 621.31
А.Р. Китаев, А.В. Терехов, А.А. Гуляев, Н.И. Королев
ОСОБЕННОСТИ РАБОТЫ КОММУТАЦИОННЫХ АППАРАТОВ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ НИЗКОГО НАПРЯЖЕНИЯ
Обоснована целесообразность экспериментального подбора АВ модульного исполнения при выполнении условия обеспечения рабочей селективности их работы
Современные способы управления и защиты электрических сетей низкого напряжения базируются преимущественно на коммутационных аппаратах модульного исполнения. Номенклатура этих аппаратов постоянно расширяется, что делает актуальным выбор наиболее надежных аппаратов при непременном учете требований экономической эффективности. Электрические сети низкого напряжения независимо от их функционального назначения, как правило, имеют несколько ступеней разветвления, что предполагает использование в них коммутационных аппаратов. В этих условиях особую роль приобретают как надежность работы каждого аппарата в отдельности, так и совместимость токо-временных характеристик (ТВХ) включенных аппаратов.
В этой связи возникает проблемы, обусловленные спецификой конструктивных решений, принимаемых при формировании ТВХ аппаратов защиты от сверхтоков.
Достаточно условно весь набор защит сверхтоков делят на две категории: перегрузочные, возникающие в условиях аварийного увеличения потребления электроэнергии в результате нарушения штатного режима работы потребителя и токи коротких замыканий, которые сопровождают аварийное образование путем протекания тока в следствии нарушения изоляции между проводниками сети. Защита от перегрузочных сверхтоков соответствует обратно зависимым от тока участком ТВХ и реализуется, в основном, с использованием встроенной в аппарат биметаллической пластины. Защита от перегрузочных сверхтоков всегда реализуется с достаточной степенью селективности, что обеспечивается увеличением уровня номинального тока в каскаде аппаратов в направлении от потребителя к источнику питания. Вместе с тем обеспечение селективности работы аппаратов в условиях аварийных режимов, вызванных токами коротких замыканий, оказывается весьма проблематичным. Дело в том, что независимо от категории (типа)
47
мгновенного расцепления аппараты защиты при различных номинальных токах фирмы изготовители не гарантируют селективность их работы. В этих условиях можно только предполагать, что селективность работы аппаратов защиты может быть реализована с некоторой вероятностью. Поэтому возникает необходимость экспериментального подбора последовательно включенных в составе каскада аппаратов защиты.
На кафедре ЭМСЭС ВГТУ разработан, при участии студентов, и внедрен в учебный процесс в курсе «Коммутационные устройства в электрических сетях» стенд, который позволяет оценить обеспечение полной селективности аппаратов защиты при аварийных режимах, связанных с протекание сверхтоков в режимах короткого замыкания. При этом обнаружен целый ряд интересных практических результатов, позволяющих уточнить применение АВ разных фирм и категорий. Так например, для фирм Schneider, IEK, ABB и Legrand Iк.з.,min варьируется в зависимости от величин номинальных токов прогрева в пределах 10% перегрузки и зачастую не совпадают со значениями, который регламентирует ГОСТ Р 5034599 (категории С6 и С10). Наилучшие результаты имеем при иссле-
довании АВ фирм Schneider (разброс Iк.з.,min менее 9%). Дополнительными исследованиями на стенде можно выпол-
нить сравнение двух вариантов совмещения обеспечения электробезопасности и защиты от сверхтоков. В первом варианте УЗО включается последовательно с автоматическими выключателями (АВ), а во втором используется автоматический выключатель дифференциального тока (АВДТ).
Особую ценность представляет исследования совместимости аппаратов защиты от сверхтоков в условиях пуска асинхронных электродвигателей (АД). Здесь на эффективность использования аппаратов влияет оценка соотношения ТВХ с пусковыми токовыми характеристиками АД.
Все проводимые на стенде исследования позволяют выполнить надежный подбор аппаратов защиты от сверхтоков в условиях практической реализации электрических сетей низкого напряжения.
Воронежский государственный технический университет
48
УДК 621.313
В.С. Ярцев, С.А. Горемыкин, Н.В. Ситников
ОСОБЕННОСТИ СНЯТИЯ ВРЕМЯ-ТОКОВЫХ ХАРАКТЕРИСТИК АВТОМАТИЧЕСКИХ ВЫКЛЮЧАТЕЛЕЙ В ЛАБОРАТОРНЫХ УСЛОВИЯХ
Рассматривается методика экспериментальной проверки работоспособности автоматических выключателей в режимах, наиболее приближенных к реальным условиям их работы
Как известно, электрическая цепь подстанции состоит из двух взаимосвязанных частей: силовой цепи и вторичных цепей управления, защиты, автоматики, сигнализации, связи. Схемы питания вторичных цепей различны и зависят от сложности схем силовых цепей и назначения подстанции. Широкое распространение получили подстанции, выполненные по упрощенным схемам. В таких подстанциях питание вторичных цепей осуществляется от трансформаторов собственных нужд.
Рассматриваемые электрические сети имеют напряжение 380/220 В и выполняются с глухозаземленной нейтралью. Для защиты цепей потребителей собственных нужд, от токов КЗ и перегрузок, целесообразно использовать коммутационные устройства с функцией защиты модульного исполнения. Такими устройствами на сегодняшний день являются автоматические выключатели. Надежность работы автоматических выключателей, верность согласование характеристик срабатывания между собой и с другими коммутационно – защитными аппаратами, будут определять требуемый уровень защиты рассматриваемых цепей и как следствие надежность работы цепей первичной коммутации подстанции.
Большой проблемой в использовании автоматических выключателей на сегодняшний день является значительный технологический разброс время – токовых характеристик автоматических выключателей, заявленных различными производителями. Поэтому практически однозначно определить рабочую точку срабатывания того или иного автоматического выключателя не представляется возможным. Так для автоматических выключателей с характеристикой «В» – срабатывание мгновенного расцепителя происходит в диапазоне от 3 до 5 кратности номинального тока автоматического выключателя,
49
а для выключателя с характеристикой «С» - от 5 до 10. Таким образом, применив автоматический выключатель не прошедший экспериментальную оценку, невозможно однозначно указать время
– токовые соотношения, при которых работает тепловой расцепитель, а когда работает электромагнитный. Поэтому для повышения надежности работы цепей подстанций с автоматическими выключателями применяют так называемую «прогрузку» данных коммутационно-защитных аппаратов, то есть помощью специального оборудования проводят экспериментальное определение времени срабатывания выключателей.
Есть ещё один фактор, влияющий на временные параметры срабатывания автоматического выключателя и не учитываемый при «прогрузке» - это температура. Данное обстоятельство порождает семейство «холодных» и «горячих» время – токовых характеристик (ХВТХ), (ГВТХ). Следует отметить, что в действительных условиях эксплуатации автоматические выключатели подвержены определенному начальному прогреву под действием токов близких к их номинальному значению. Поэтому экспериментальное снятие время – токовых характеристик автоматических выключателей, наиболее приближенных к реальным условиям работы, необходимо проводить именно в условиях их нагрева номинальными токами. В этой связи, была предложена следующая методика снятия «реальной» ВТХ.
Испытуемый автоматический выключатель определённое время подвергается действию номинального тока - согласно его паспортным данным. Время воздействия определяется выходом выключателя на установившейся тепловой режим. Признаком достижения установившегося теплового режима служит отсутствие изменений температуры в токопроводящих частях автоматического выключателя. Контроль температуры осуществляется на клемных зажимах автоматического выключателя мультиметром с термодатчиком. Затем устанавливается ток сверх номинального значения и фиксируется время срабатывания.
Приступать к снятию остальных точек ВТХ следует после предварительного измерения температуры, и обеспечения ее на предварительно достигнутом установившемся уровне. Обеспечение требуемой температуры в случае её завышенного значения осуществляется остыванием автоматического выключателя, в случае пониженного значения, «прогревом» по выше описанной методике. В результате проведённых исследований были сняты
50