

Учебное пособие 800577
.pdfможно сформировать как режимы динамического торможения, так и противовключения.
При закрывании всех транзисторов, обмотки отключатся от источника, но ток в обмотках будет протекать через диоды, так как в индуктивностях была накоплена энергия магнитного поля. Этот режим можно отнести к режиму динамического торможения и использовать его при небольших ошибках регулирования. В тех случаях, когда сигнал задания резко уменьшится или произойдет сброс нагрузки, возникает необходимость увеличения ускорения торможения .
Наилучший эффект можно получить в этих случаях используя режим противовключения, а это возможно осуществить оставляя включенным только один определенный транзистор, тогда на обмотках через диоды и включенный транзистор изменится полярность источника питания инвертора (выпрямителя).
Отсюда следует, что управлять БДПТ можно не только за счет определенного порядка чередования базовых векторов (векторное управление) или широтно-импульсной модуляцией по синусоидальному закону (скалярное управление), но и при формировании нулевых векторов в режимах пауз (торможение противовключением или динамическое). Такое чередование режимов позволяет формировать требуемые динамические процессы без использования дополнительных аппаратных средств, решая эти проблемы программно.
Литература
1.Киселёва О.А. Математическая модель системы управления бесконтактным двигателем постоянного тока/ О.А. Киселёва, А.В. Романов, Д.П.Киселёв// Моделирование, оптимизация и информационные технологии.-2015.-Научный журнал №1(8) -с.1-4.
2.Киселёв Д.П. Моделирование адаптивного управления в электромеханической системе/ Д.П. Киселёв, О.А. Киселёва// Моделирование, оптимизация и информационные технологии.- Научный журнал 2014.- №3(6) - с.1-4.
Воронежский государственный технический университет
21
УДК 621.318.24
Е.А. Кретинин, В.О. Корчагин
РАСЧЁТ МАГНИТНОГО УСИЛИТЕЛЯ СЦЕПЛЕНИЯ КОЛЕСА С РЕЛЬСОМ
Рассмотрены вопросы усиления сцепления колеса с рельсом, основанного на использовании магнитного поля. Получены зависимости, построены графики
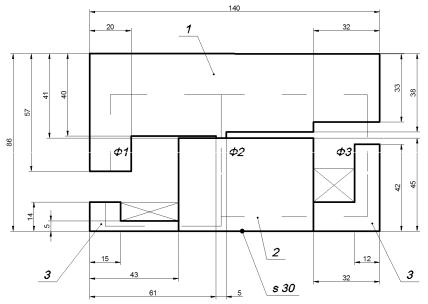
Повышение сцепления колеса с рельсом позволяет решить проблемы, связанные с возникновением буксования и юза колёсных пар. В данной работе рассмотрено устройство, основанное на воздействии магнитного поля на колесо и рельс. При этом колесо и рельс являются частью магнитной цепи, между ними возникают силы притяжения.
Рис.1. Расчётная магнитная цепь: 1 - бандаж колеса; 2 - головка рельса; 3 - вспомогательная часть магнитопровода.
Магнитная система устройств характеризуется сложной трехмерной геометрией, многообразием границ раздела сред с различными магнитными свойствами, нелинейностью
22
характеристик намагничивания. Для получения возможности аналитического решения принимается ряд упрощающих допущений. Применение упрощенных математических моделей достаточно на предварительного проектирования. При расчёте классическим методом магнитопровод включает: бандаж колеса, головку рельса, и вспомогательную часть. Магнитная цепь (рис. 1) состоит из трёх ветвей, средняя содержит источник МДС.
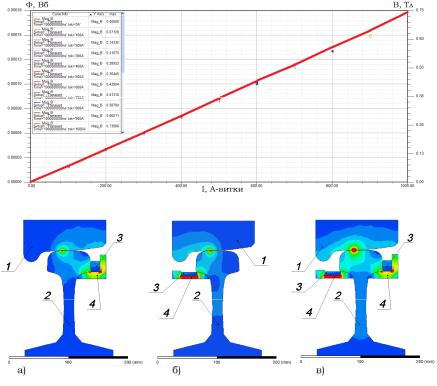
В результате расчётов построена вебер-амперная характеристика для зоны контакта колеса с рельсом. Наличие воздушных зазоров в ветвях магнитной цепи способствует спрямлению графика.
Рис.2. Вебер-амперная характеристика магнитной цепи
Рис.3. Концентрация магнитного поля а - насыщение магнитной цепи от правой части обмотки; б - насыщение магнитной цепи от левой части обмотки; в - насыщение магнитной цепи от всей обмотки.
1 - бандаж колеса; |
2 - рельс; |
3 - обмотка; |
|
|
23 |
4 - вспомогательный магнитопровод.
Для повышения степени достоверности математических моделей требуется глубокий анализ магнитного поля в ферромагнитных средах на основе применения численных методов решения нелинейных краевых задач. Такие исследования позволяют по-новому построить математические модели и учесть особенности процессов, возникающие с высокими нагрузками и нетипичными конфигурациями и соотношениями геометрических размеров.
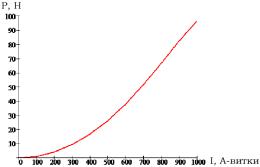
Расчёты показывает, что обеспечивается хорошая однородность магнитного поля в зоне контакта колеса с рельсом. При МДС 1000 А-витков магнитный поток, пронизывающий зону контакта колеса и рельса составляет 0,00016 Вб, индукция - 0,74 Тл, напряжённость - 298 А/м. сила притяжения 95 Н.
Рис.4. Зависимость сил притяжения колеса и рельса от МДС Рассмотренное устройство может использоваться на
руководящих уклонах, оно позволяет повысить сцепной вес подвижного состава на требуемую величину.
Литература 1.Сливинская А.Г. Электромагниты и постоянные магниты.
Учебное пособие для студентов вузов. М., "Энергия", 1972.
2.В. В. Мишин, В. А. Зябрев и др. Магнитный догружатель рельсового транспортного средства. Авторское свидетельство
СССР № 1286453, Бюл. № 4 30.01.87.
Московский государственный университет путей сообщения (Воронежский филиал)
(РОАТ ВФ МИИТ)
24
УДК 621.313.33
Е.А. Кузнецова, С.А. Белозоров
ОПТИМИЗАЦИЯ ГЕОМЕТРИИ ШЛИЦА ПАЗА
В данной работе рассматриваются способы влияния изменяющейся геометрии шлица паза на электромагнитный момент асинхронного двигателя
В настоящее время перед производством стоит сложная задача модернизации двигателей. Поскольку в наибольшей степени распространены асинхронные двигатели малой мощности, то один из них был взят за основу для исследования. Существует два различных подхода к решению поставленной задачи. Первый из них - использование новых перспективных материалов. Второй - оптимизация известных или создание концептуально новых конструкций двигателей. Модернизация конструктивных решений современных асинхронных двигателей позволяет без больших экономических затрат повысить их энергоэффективность. Отсюда вывод, что правильно изменив активную часть машины можно
добиться её улучшения. |
|
|
|
|
В |
классических |
асинхронных |
двигателях |
при |
проектировании используется пазовая |
конструкция |
статора с |
||
зубчатым строением воздушного зазора. Пазовый шлиц, в данном случае, играет большую роль в формировании кривой индукции в зазоре, поэтому оптимизация его геометрии может повысить энергетические показатели машины.
В книгах по проектированию [1,2] даны рекомендации по выбору размеров шлица паза, которые учитывают технологические требования по свободной укладке проводников обмотки в пазы. С точки зрения влияния размеров на энергетические показатели асинхронного двигателя, шлиц не рассматривается. Оптимизация подбора геометрии воздушного зазора приводит к изменению кривой индукции и в итоге - к улучшению параметров машины.
На примере двигателя 4А71В6, сделана оценка влияния размеров шлица паза статора на величину электромагнитного момента. Сначала, было произведено изменение ширины шлица паза в диапазоне от 0 до 3 мм, с шагом 0,25 мм. Моделируемый двигатель имеет базовый размер шлица 2 мм. На данном этапе
25
ставится вопрос об оптимальности выбранного раскрытия паза. Моделирование производилось для двигателя в номинальном режиме работы.
Результаты исследования приведены на рис.1.
Рис.1. Влияние ширины шлица на электромагнитный момент
По результатам исследования влияния ширины шлица (bш) паза статора на электромагнитный момент, можно сделать выводы:
1)Размеры раскрытия паза, выбираемые по технологическим рекомендациям укладки обмотки в пазы - не оптимальны.
2)С точки зрения максимального электромагнитного момента этот узел не рассматривается, хотя увеличение раскрытия паза с 2-х до 2,5 мм приводит к повышению момента.
3)При полностью закрытых пазах (когда bш =0) наблюдается скачок электромагнитного момента до 6,18 Н∙м, но возникает серьезная проблема укладки обмоток в пазы.
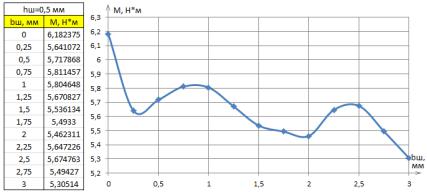
Высота шлица (hш) так же оказывает существенное влияние на величину электромагнитного момента. Результаты моделирования влияния высоты шлица на момент представлены на рис.2.
На основании полученных данных можно сделать выводы:
1)Влияние размеров шлица на электромагнитный момент подтвердилось.
2)Электромагнитный момент при оптимизации геометрии шлица удалось поднять с 5,55 Н∙м до 6,2 Н∙м.
26

Рис.2. Влияние высоты шлица на электромагнитный момент
Сравнивая кривые индукции в воздушном зазоре для базовой модели (hш = 0,5 мм, bш = 2 мм) и модели с закрытыми пазами (hш = 0,5 мм, bш = 0 мм), просматривается сглаживание кривой индукции во втором случае.
В результате исследований выяснено, что применение закрытых пазов статора может повысить электромагнитный момент на 15%, при той же потребляемой из сети мощности, что ведёт к увеличению КПД. Это повышение возможно за счёт выравнивания кривой индукции в воздушном зазоре (уменьшение высших гармонических составляющих поля, за счёт корректировки геометрии зубцовой зоны).
Литература 1. Копылов И.П. Проектирование электрических машин:-М. Юрайт
2014.-766с.
2. Гольдберг О. Д. Проектирование электрических машин – М.: Высшая школа, 2006. – 430с.
Воронежский государственный технический университет
27
УДК 621.313.292
Д.П. Киселёв, Г.А. Копылов, О.А. Киселёва
УСЛОВИЯ КОММУТАЦИИ БЕСКОНТАКТНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПРИ ИМПУЛЬСНОМ УПРАВЛЕНИИ
Рассматриваются условия коммутации по схеме замещения бесконтактного двигателя постоянного тока для определения зависимости электромагнитного момента от угла между полем ротора и статора
Векторное управление базируется на чередовании по определенному закону шести векторов, формируемых в инверторе системой управления.
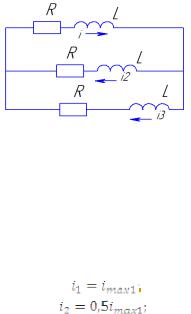
Для обеспечения надежного функционирования ключей инвертора бесконтактного двигателя постоянного тока (БДПТ) переход из одного состояния в другое, то есть от формирования одного базового вектора к формированию следующего необходимо делать через нулевое состояние векторов. Схема замещения обмоток БДПТ при формировании нулевого состояния вектора показана на рис.1.
Рис. 1. Схема замещения обмоток БДПТ при формировании нулевого состояния
В схеме (рис.1) уже накоплена энергия магнитного поля, так как перед этим состоянием был сформирован один из шести базовых векторов. Рассмотрим случай, когда ротор еще неподвижен. После формирования любого базового вектора токи протекают в индуктивностях, поэтому при переходе к нулевому состоянию токи в момент коммутации:
(1)
(2)
28
(3)
и в переходных режимах:
(4)
(5)
(6)
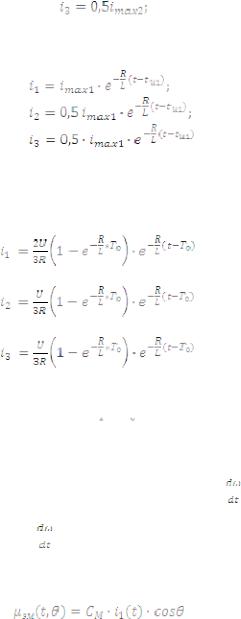
Такой переход через нулевое состояние необходим для защиты силовых ключей от сквозных токов. Для второго условия, где ограничивается длительность импульса, получим:
; |
(7) |
; |
(8) |
. |
(9) |
Все условия (1) – (9) рассмотрены для случая неподвижного ротора. Если считать, что при 




 ротор может приобрести
ротор может приобрести
ускорение, то возникает проблема, связанное с определением пространственного положения ротора. Момент электромагнитный является функцией угла 
 между полем ротора и статора.
между полем ротора и статора.
Момент трогания ротора определим из условия 



 .
.
Для обеспечения 



 необходимо учитывать, что могут
необходимо учитывать, что могут
возникнуть ограничения, в связи с тем, что электромагнитный момент является функцией угла между полем ротора и статора
, |
(10) |
29
а |
. |
|
Значит, за время импульса максимальный момент будет |
||
равен: |
|
|
|
, |
(11) |
откуда: |
|
|
|
. |
(12) |
Условие (12) может не выполняться для первого импульса, так как угол 
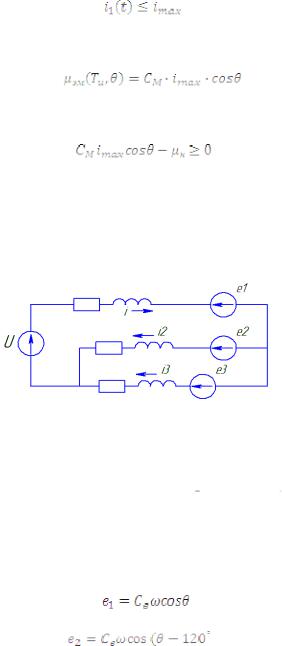
 изменяется в большом диапазоне. Если ротор начал вращение и формируется базовый вектор, то схема замещения примет вид, представленный на рис.2. Схема перехода к новому базовому вектору через нулевое состояние, представлена рис.3.
изменяется в большом диапазоне. Если ротор начал вращение и формируется базовый вектор, то схема замещения примет вид, представленный на рис.2. Схема перехода к новому базовому вектору через нулевое состояние, представлена рис.3.
Рис. 2. Схема замещения обмоток БДПТ при вращении ротора в момент формирования нового базового вектора
В инверторах преобразователей для БДПТ частота широтноимпульсной модуляции лежит в широких пределах, например, от 2 кГц до 20 кГц. Значит период от 0,5



 до 0,5
до 0,5



 с, а за это время ротор может пройти угол около градуса.
с, а за это время ротор может пройти угол около градуса.
Погрешность расчета будет невелика (не более 0,01 %) , если принять величину ЭДС неизменной за время одного импульса постоянной и равной
(13)
) |
(14) |
30