

Учебное пособие 800577
.pdfбазисных функций дает возможность находить решение при существенной экономии вычислительных ресурсов и времени подготовки модели.
Рис.2. Концентрация магнитного поля Полученные результаты показывают, что приведенная
конструкция магнитной системы требует усовершенствования, поскольку обладает большими потерями из-за значительного воздушного зазора.
Литература 1.Воробьев В.И., Измеров О.В., Волохов С.Г. Планирование
инженерного анализа при создании устройств, использующих магнитное поле для снижения потерь энергии в системе "колесо - рельс". Материалы XI международной научно-практической интернет-конференции. 01 марта – 30 июня 2013 г., г. Орёл.
2.Самарский А.А. Введение в численные методы. Учебное пособие для вузов. 3-е изд., стер. - СПб.: Издательство "Лань", 2005. - 288 с: ил.
3.Геча В.Я. Использование конечноэлементных моделей для проектирования фрагментов сложных электромеханических систем / В.Я. Геча // Труды ВНИИЭМ. – М., 1985.
4.О.Б. Буль Методы расчёта магнитных систем электрических аппаратов: Магнитные цепи, поля и программа FEEM: Учеб. пособие для студ. высш. учеб. заведений - М.: Издательский центр
"Академия", 2005. - 336 с.
Московский государственный университет путей сообщения (Воронежский филиал)
(РОАТ ВФ МИИТ)
11
УДК 621.313.292
Г.А. Копылов, Д.П. Киселёв, О.А. Киселёва
СХЕМА ЗАМЕЩЕНИЯ БЕСКОНТАКТНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПРИ ИМПУЛЬСНОМ УПРАВЛЕНИИ
Рассматривается схема замещения бесконтактного двигателя постоянного тока при подаче первого импульса для систем управления с датчиком положения ротора
Электропривода с бесконтактными двигателями постоянного тока (БДПТ) при импульсном управлении можно проектировать как с датчиками положения ротора (ДПР), так и без них, используя наблюдатели состояния в цепи обратной связи для восстановления выходных координат [1].
В любом случае при формировании первого импульса возникают проблемы связанные с определением пространственного положения ротора. В электроприводах с ДПР задача ограничивается наличием чувствительных элементов, обеспечивающих информацию о положении ротора дискретно через определенный сигнальный угол 
 .
.
Рассмотрим два варианта для сигнального угла |
: |
||
- вектор поля ротора находится в одном из сигнальных секторов |
|||
|
|
, |
(1) |
|
|||
где m- число фаз; p-число пар полюсов;
- положение ротора не определено в момент включения, тогда сигнальным сектором можно считать
. |
(2) |
Исходное состояние всех ключей инвертора |
разомкнутое |
(состояние формирования нулевого вектора). При подаче первого импульса на БДПТ состояние инвертора измениться, например, три ключа 1,5 и 6 замкнуться и будет формироваться один из базовых векторов в пространстве (рис. 1).
Для схемы с ДПР угол между полем ротора и статора будет определен выбранным сигнальным сектором. Переход к следующему базовому вектору в этом случае возможен только при повороте ротора на угол  .
.
12
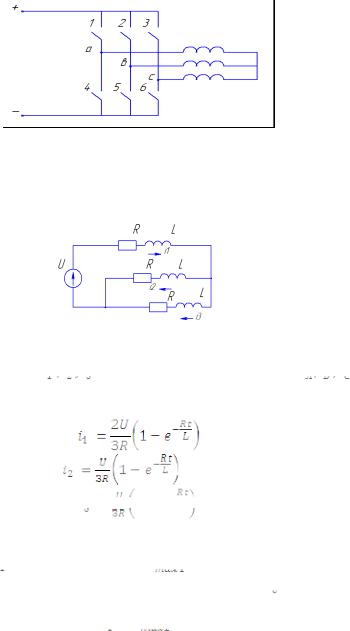
Рис. 1. Функциональная схема силовых ключей инвертора При коммутации ключей инвертора обязательно должно
выполняться условия открытых состояний: два ключа четных - один нечетный или два нечетных и один четный. Схема замещения для первого импульса приведена на рис. 2.
Рис. 2. Схема замещения БДПТ при подаче первого импульса Ротор неподвижный, поэтому ЭДС, наводимая в статоре
равна нулю. Токи 






 , будут соответствовать токам
, будут соответствовать токам 









по заранее заданному закону в системе с ДПР.
Определим токи в обмотках статора при первой коммутации
(3)










 .
.
Время окончания первого импульса можно определить по разным условиям квантования:
-ток 
 не должен быть более
не должен быть более 



 ;
;
-длительность импульса должна быть не более 
 .
.
При выполнении первого условия получим:








 ,
,
13

. |
(4) |
Откуда
. (5)
При выполнение второго условия максимальная длительность импульса ограничена 






 , тогда
, тогда
. |
(6) |
Конструирования импульсных систем управления БДПТ, обладающих требуемыми свойствами, является сложной задачей. Качество переходных процессов в таких электроприводах зависит от режимов поиска оптимального угла между полем ротора и статора.
Литература 1.Киселёв Д.П. Моделирование адаптивного управления в
электромеханической системе/ Д.П. Киселёв, О.А. Киселёва// Моделирование, оптимизация и информационные технологии.- Научный журнал 2014.- №3(6) - с.1-4.
2.Киселёва О.А. Моделирование наблюдателя состояния в электромеханической системе на базе бесконтактного двигателя постоянного тока/ О.А. Киселёва, Д.П. Киселёв // Моделирование, оптимизация и информационные технологии.- Научный журнал 2014.- №3(6) - с.4-6.
Воронежский государственный технический университет
14
УДК621.313
А.Н. Скорняков, Р.О. Нюхин
МОДЕЛИРОВАНИЕ РАСПРЕДЕЛЕНИЯ СИЛОВЫХ ЛИНИЙ МАГНИТНОГО ПОЛЯ ДВИГАТЕЛЯ АИР56В2
Приведены результаты численного решения задач электромагнитного расчета асинхронного двигателя с железомедным ротором для различных сплавов типа СМ
Для механизмов, имеющих тяжелые условия пуска, где по ряду причин необходимо использовать асинхронные двигатели с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения. Эти двигатели отличаются от двигателей нормального исполнения только устройством короткозамкнутой обмотки ротора. Одни из них снабжены двумя самостоятельными обмотками типа беличьей клетки, другие имеют более глубокие пазы ротора. Такие меры позволяют усилить проявление эффекта вытеснения тока, что
врезультате повышает пусковой момент машины.
Воснове предлагаемой идеи по улучшению характеристик серийных АД с короткозамкнутыми роторами лежит использование
вкачестве материала обмотки ротора железомедных сплавов типа СМ, обладающих хорошими как магнитными, так и проводящими свойствами (1). При этом предлагается существенно изменить конструкцию ротора по сравнению с серийными машинами, а статор оставить неизменным. Ротор представляет собой втулку из железомедного сплава типа СМ, в которой фрезеруются продольные пазы на всю длину активной части таким образом, чтобы получились короткозамыкающие кольца. В результате значительно упрощается зубцовая зона. Такая конструкция, как показывают проведенные расчеты, позволяет значительно улучшить пусковые свойства АД. Кроме того, предложенная конструкция в технологическом отношении позволяет избежать дорогостоящей операции заливки ротора.
Эффективность использования железомедного зубчатого ротора проверялась с использованием данных конкретного серийного двигателя АИР56В2, имеющего следующие номинальные данные: Р=250 Вт, U=220/380 В, 2р=2, f=50 Гц.
15
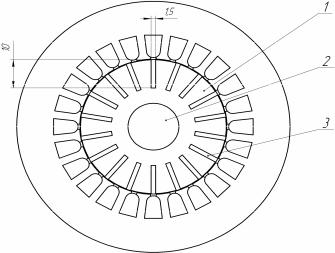
Геометрия и обмоточные данные статора принимались как у серийной машины. Изменена только конструкция и материалы ротора. На рис.1 представлена рассматриваемая геометрия ротора описанной конструкции.
Рис. 1. Поперечное сечение АД с ЖМЗР:
1 – массивный втулка из сплава СМ; 2 – вал из стали 45; 3 – паз (воздух)
В качестве материала обмотки ротора рассматривались железомедные сплавы СМ-15, СМ-20, СМ-30, СМ-40, СМ-60 (1). Марка сплава означает процентное содержание в славе меди, а соответственно все остальное – сталь. Эти сплавы обладают как электрическими, так и магнитными свойствами. Свойства сплавов СМ различных марок сильно различаются. Причем с улучшением электрических свойств магнитные значительно ухудшаются.
Расчет машины проводился методов конечных элементов, реализованных в ANSYS. Порядок работы в ANSYS при электромагнитном анализе состоит из следующих этапов: выбор типа анализа, создание геометрии, выбор типа элементов, ввод свойств материалов, назначение свойств материала, разбиение областей на сетку из конечных элементов, ввод нагрузок и граничных условий, выбор вида электромагнитного анализа и
16
установка опций решателя, запуск на решение, анализ результатов и использование макросов постпроцессора для расчета интересующих интегральных величин. Поскольку машина цилиндрическая, то, как показывает опыт, двумерный анализ является наиболее целесообразным с точки зрения трудоемкости расчетов с одной стороны и достаточной точности с другой.
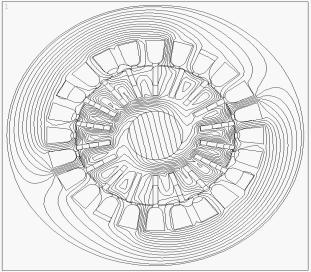
На рис.2 приведены результаты численного решения задач электромагнитного расчета в виде картин распределения силовых линий магнитного поля в некоторый рассматриваемый момент времени для сплава СМ-15.
Рис. 2. Картина магнитного поля АД с ЖМЗР в виде силовых линий (сплав СМ-15)
Литература
1.Могильников В.С., Олейников А.М., Стрельников .Н. Асинхронные двигатели в двухслойным ротором и их применение. М: Энергоатомиздат, 1983. 120с.
2.ANSYS Theory Reference. 001242. Eleventh Edition. SAS IP, Inc. 1286 p.
Воронежский государственный технический университет
17
УДК 621.313
Д.А. Чурсанова, С.А. Белозоров
ПОВЫШЕНИЕ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ С ПОМОЩЬЮ МАГНИТНЫХ КЛИНЬЕВ
В статье рассматривается возможность повышения электромагнитного момента в асинхронных двигателях малой мощности посредством использования магнитных клиньев
Повышение энергетических показателей АД является одной из актуальных проблем. Связано это с тем, что асинхронные двигатели являются основным потребителем электроэнергии в стране, и повышение КПД приводит к огромной экономии электроэнергии.
Одним из перспективных направлений повышения КПД двигателей, является использование магнитных клиньев, которые представляют из себя пазовые клинья, изготовленные из материала с большой магнитной проницаемостью. Так, например, магнитные клинья могут быть изготовлены из стали.
Внастоящее время магнитные клинья используются в машинах большой мощности, с прямоугольными пазами статора. В таких машинах, использование открытых пазов приводит к большим амплитудам зубцовых гармоник поля, увеличению дифференциального рассеяния и как следствие - ухудшению характеристик.
Применение магнитных клиньев в машинах малой мощности, приводит к удорожанию двигателя, что в настоящее время рядового покупателя волнует меньше, чем его КПД. В настоящее время распространен подход повышения КПД за счет увеличения массогабаритных показателей, что приводит как к увеличению КПД, так
ик увеличению цены. Оптимизация конструкции в меньшей степени удорожает двигатель, нежели увеличение его габаритов. А это высокая конкурентоспособность изделия на рынке.
ВАД малой мощности, как правило, используются полузакрытые пазы, которые очень сильно снижают эффект от применения магнитных клиньев, но это не всегда так. Дело в том, что ширина раскрытия паза, выбирается исходя из технологических соображений, в частности из-за возможности укладки проводников
18
обмотки в пазы. Это с одной стороны приводит к удешевлению изготовления, а с другой, при неудачных размерах раскрытия паза приводит к ухудшению его характеристик. Так использование магнитных клиньев позволяет выбрать оптимальный размер раскрытия паза для каждой конструкции двигателя.
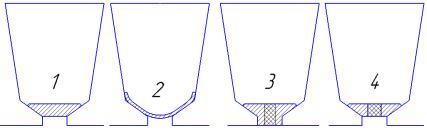
Для трапецеидальных пазов можно применять целый ряд различных форм магнитных клиньев (рис. 1). Формы 1 и 2 подразумевают выполнение пазовых клиньев стандартных размеров из материалов с большой магнитной проницаемостью. Формы 3 и 4 представляют собой многослойные пазовые клинья, где между двумя ферромагнитными материалами расположен материал с низкой магнитной проницаемостью (µ ≈ 1). При применении таких клиньев, возможна корректировка величины шлица паза статора, что позволяет подходить к выбору размера немагнитного слоя исходя из оптимального распределения магнитного поля в зубцовом слое. Отрицательной стороной форм клиньев 3 и 4 является удорожание их изготовления.
Формы магнитных клиньев
Для количественной оценки влияния магнитных пазовых клиньев в машинах малой мощности были проведены исследования на двигателе 4А132S4.
В результате исследования было выяснено, что если в двигателе 4А132S4 применить пазовый клин формы 1 из электротехнической стали толщиной 1,2 мм, то момент повысится на 0,76%.
Воронежский государственный технический университет
19

УДК 621.313.292
Д.П.Киселёв, А.В. Романов
ФОРМИРОВАНИЕ НУЛЕВЫХ ВЕКТОРОВ В БЕСКОНТАКТНЫХ ДВИГАТЕЛЯХ ПОСТОЯННОГО ТОКА ПРИ ИМПУЛЬСНОМ УПРАВЛЕНИИ
Рассматриваются способы коммутации силовых ключей инвертора в режимах торможения при скалярном и векторном импульсном управлении бесконтактным двигателем постоянного тока
Современные инверторы для бесконтактных двигателей постоянного тока (БДПТ) выполняются на основе полностью управляемых силовых полупроводниковых приборов – запираемых тиристоров (GTO), либо IGBT. На рис.1 представлена трёхфазная мостовая схема автономного инвертора на шести IGBTтранзисторах V1-V6 включенными встречно-параллельно с диодами обратного тока D1-D6.
Скалярное или векторное импульсное управления БДПТ характеризуется периодами, внутри которых обмотки статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя для формирования базовых векторов [1,2].
Структурная схема силовой части системы управления БДПТ
Длительность этих состояний внутри периода широтноимпульсной модуляции (ШИМ) чередуется с паузами (режимами торможения), которые формируют нулевые вектора. В паузах
20