

1. Сокольский р. Программно-аппаратный комплекс «скат» для измерения ачх четырехполюсников. – Радио, 2011, №9, с. 26-28.
Воронежский государственный технический университет
УДК 681.3
М.В. Попова, А.И.Мушта
РАЗРАБОТКА АСИНХРОННОГО
КОММУНИКАЦИОННОГО ИНТЕРФЕЙСА
ХОСТ-МАШИНЫ И МИКРОПРОЦЕССОРА
Одним из основных направлений научно-технического прогресса в настоящее время является развитие микроэлектроники, и широкое применение её изделий в промышленном производстве. Микропроцессорная система без средств ввода и вывода оказывается бесполезной, именно для этих целей используются коммуникационные порты.
Порт содержит следующие компоненты:
- входной буфер FIFO имеет восемь уровней 32-разрядных слов;
- выходной буфер FIFO имеет восемь уровней 32-разрядных слов;
- модуль арбитра порта PAU – координирует работу коммуникационных портов в соответствии с поставленной задачей;
- регистр инструкций коммуникационного порта CPCR позволяет управлять и контролировать функциями коммуникационного порта и операциями передачи данных между ИС и внешними устройствами;
- регистр программного сброса.
Структурная схема порта представлена на рисунке 1. На рисунке 2 представлено соединения двух интегральных схем через коммуникационные порты [1]

Рис. 1. Блок-схема коммуникационного порта
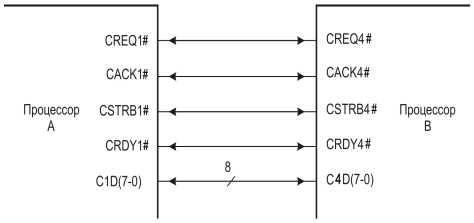
Рис. 2. Пример соединения двух интегральных схем через коммуникационные порты
Модель коммуникационного порта разрабатывалась с САПР Xilinx ISE 13.2, которое позволяет выполнить предварительную верификацию проекта. В качестве ПЛИС было выбрано семейство Kintex-7, позволяющее достичь максимальных показателей цена и производительность.
Описание коммуникационного порта произведено на языке высокого уровня – Verilog поблочно. Результатом Verilog описания является RTL-схема. На рисунке 3 представлена rtl-схема арбитра PAU.
Для проверки правильности работы каждого блока была написана тестовая программа testbench, ее результатом являются временные диаграммы[2]. На рисунке 3 представлена временная диаграмма выходного буфера FIFO.

Рис. 3. Rtl-схема арбитра PAU

Рис. 4. Временные диаграммы работы выходного буфера FIFO
Как видно из рисунка при обнулении буфера (с приходом сигнала rst) срабатывает флаг empty, свидетельствующий о том, что буфер пуст, также видно, что с приходом сигналов RE (read enable) и WE (write enable) слово, поступающее на data_in, появляется на data_out.
Литература
1 Мячев А. А. Интерфейсы систем обработки данных: Справочник/А. А. Мячев и др. – М.: Радио и Связь, 1989 – 305с.
2 Поляков А.К. Языки VHDL и VERILOG в проектировании цифровой аппаратуры. – М.: СОЛОН-Пресс, 2003. – 320 с.
Воронежский государственный технический университет
УДК 681.3
А.В. Турецкий, Т.И. Кораблинова
Разработка конструкции автомата включения освещения
Рассматривается принцип работы и конструкционное решение автоматического выключателя освещения
Автоматический выключатель освещения предназначен для автоматизированного управления освещением в помещении и на улице, с целью снижения потребления электроэнергии.
В современном мире вопрос экономии электроэнергии с каждым годом становится всё более важным. К тому же выключать освещение мы забываем очень часто, а в коридорах и подъездах он горит всю ночь, что приводит к неоправданному перерасходу подорожавшей электроэнергии. В связи с этим актуальным становится использование таких осветительных приборов, которые снабжены устройством на базе датчика движения, называемом автоматическим включателем света. Благодаря этим устройствам, осветительные приборы включаются в тот момент, когда это необходимо, и находятся в выключенном состоянии, когда в освещении, даваемом ими, нет необходимости.
Современная элементная база электроники позволяет создавать устройства простые по схемотехнике, но имеющие достаточно широкий набор функций. Раньше такие приборы были доступны лишь для использования в сложных и дорогих профессиональных системах, а теперь их применение делает нашу повседневную жизнь более комфортной и легкой.
Автоматические включатели освещения работают на основе инфракрасных и акустических датчиков. Автоматические включатели на основе ИК-датчиков наиболее востребованы. Пироэлектрические датчики устроены таким образом, что реагируют не на само инфракрасное излучение, его абсолютную величину, а именно на его изменение. Поэтому, даже незначительное перемещение объекта, например, человека будет зафиксировано таким датчиком.
Для управления светом в подъездах многоквартирных домов используются оптико-акустические выключатели. Выключатели содержат микрофон, оптический датчик и выходное ключевое устройство.
Логика работы подобных выключателей та же, что и у инфракрасных: в светлое время суток микрофон отключен оптическим датчиком, а в темноте освещение включится даже при незначительных звуках в подъезде.
Устройство управляется специализированной микросхемой, в качестве датчика используется ИК-фотодиод и пироэлектронный датчик. В качестве силового элемента, коммутирующего нагрузку, используется симистор, подключаемая мощность осветительных ламп до 500 Ватт.
Разработана ПП из двухстороннего фольгированного стеклотекстолита, использование которого удобно и экономично в условиях серийного производства. Конструкция платы предусматривает смешанный монтаж. Фотодиод и пиродатчик подняты над поверхностью платы для увеличения угла обзора. Симистор устанавливается на радиатор с применением теплопроводящей пасты, которая уменьшает переходное сопротивление. В плате выполнены 4 отверстия диаметром 3 мм для крепления ее к основанию.
Основание корпуса изготавливается из литьевого сплава АЛ8, так как этот сплав наиболее прочен и часто используется при антивандальном исполнении. В основании предусмотрены 4 бобышки с резьбовыми отверстиями для крепления платы, 2 отверстия для крепления устройства на стену и прямоугольное окно для выхода проводов. По 4-м углам также расположены 4 бобышки с резьбовыми отверстиями для крепления крышки. По периметру выполнен паз под стенку крышки.
Крышка также изготавливается из прочного литьевого сплава АЛ8. В крышке по углам расположены 4 отверстия с зенковкой под потайные головки винтов. В центре крышки располагается прямоугольное окно для защитного стекла. В этом окне по периметру располагается паз для крепления защитного стекла.
ПП крепится к основанию с помощью 4-х винтов, крышка крепится к основанию при помощи 4-х винтов с потайной головкой. Защитное стекло приклеивается к крышке клеем БФ-4.
Устройство располагается на вертикальных поверхностях напротив лестничных площадок, в местах с максимальным углом обзора.
Дальнейший прогресс устройства возможен в сторону увеличения угла обзора и расширения его функциональных возможностей за счет введения в схему новых элементов.
УДК 681.3
А.П. Собина, В. А. Кондусов
СТАБИЛИЗАТОР ЧАСТОТЫ
ВРАЩЕНИЯ МИКРОЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Рассматривается принцип раьоты и конструкторское решение стабилизатора частоты вращения микроэлектродвигателя постоянного тока
Стабилизатор частоты вращения создан с целью усовершенствования учебной лабораторной установки по исследованию и измерению параметров микроэлектродвигателей. Позволяет студентам получить знания и практические навыки в разработке, отладке и анализе работы электромеханических устройств с применением электродвигателей постоянного тока.
Устройство представляет собой отдельный самостоятельный блок, способный работать от источника постоянного тока напряжением 8..22 В. Для работы устройства также требуется сигнал с оптического датчика скорости вращения, либо датчика Холла.
Принципиальная электрическая схема разработанного устройства представлена на рисунке 1.

Рис. 1. Электрическая принципиальная схема
Основные узлы предлагаемого устройства – это преобразователь частота-напряжение, компаратор, генератор ШИМ, стабилизатор опорного напряжения 5 В, силовой ключ. Преобразователь частота-напряжение выполнен на специализированной микросхеме тахометра DA1 LM2917 фирмы Texas Instruments. Выходное напряжение прямо пропорционально входной частоте. Зависимость линейная. Сигнал с датчика частоты, подключенного к коаксиальному разъему Х1 СР-50, через токоограничивающий резистор R2 поступает на положительный вход 1 встроенного в микросхему компаратора. На отрицательный вход 11 подается напряжение смещения 0.6 В, сформированное цепью R5-VD1. Таким образом пороговое напряжение срабатывания составляет 0.6 В. Конденсаторами С1-С2 и резистором R3 настраивается диапазон входных частот, а также крутизна кривой преобразования. Преобразованный в напряжение сигнал с выхода 5 через резистор R8 поступает на положительный вход 1, встроенного в микросхему ШИМ-контроллера DA2 TL494 (KA7500), компаратора напряжения. Сигнал сравнивается с напряжением на отрицательном выводе 2, которое устанавливается переменным резистором R7 ручной регулировки частоты вращения микроэлектродвигателя. Стоит отметить что микроcхема DA2 также в своем составе содержит стабилизатор опорного напряжения 5 В (выв. 14). В данной схеме он используется для создания напряжения сравнения на выводе 2 для предотвращения ухода частоты вращения от заданного значения в связи с просадкой напряжения питания и т.д. Разностный сигнал с компаратора поступает на встроенный в микросхему генератор ШИМ-сигнала. В результате изменяется ширина импульса генерируемого ШИМ-сигнала, который с выходов 9,10 поступает на затвор мощного полевого ключа VT1, в цепь истока которого непосредственно и включен микроэлектродвигатель к клеммам Х2.1 и Х2.2. Частота ШИМ определяется номиналами R10, C5 и в данном случае составляет 1 кГц.
Диод VD2 служит для защиты схемы от переполюсовки, VD3 – от высоковольтных выбросов на обмотках электродвигателя.
Питание устройства осуществляется от лабораторного источника питания. Для подключения предусмотрен кабель с разъемами типа “banana”. Напряжение питания может быть изменено в диапазоне 9...22 В в зависимости от типа подключаемого электродвигателя.
Внешний вид устройства показан на рисунке 2.

Рис. 2. Внешний вид устройства
Литература
1. LM2907/LM2917 Frequency to Voltage Converter - Texas Instruments www.ti.com/lit/ds/snas555b/snas555b.pdf;
2. TL494 (Rev. E) - Texas Instruments www.ti.com/lit/ds/symlink/tl494.pdf;
3. http://istochnikpitania.ru/index.files/Nov_sxem.files/Nov_sxem190.htm
Воронежский государственный технический университет
УДК 681.3
Н.Г.Котляр, В.С. Цымбалюк
Электроакустический датчик
Электроакустический датчик предназначен для фиксировании всплеска звукового сигнала определенной частоты при механических воздействиях на тот или иной предмет.
В последнее время все большую популярность завоевывают электроакустические датчики разрушения стекла. Удобство их эксплуатации заключается не только в отсутствии необходимости приклеивать датчики на стекло, но и возможности охраны одним прибором нескольких стеклянных проемов очень больших площадей.
Данное устройство разрабатывается с целью решения проблемы ложных срабатываний, а также регулировки работы датчика в зависимости от толщины стекла и предотвращения проникновения злоумышленника.
Принцип работы датчиков подобного рода основан на фиксировании всплеска звукового сигнала определенной частоты, возникающего при разрушении стекла. Спектр звукового сигнала разрушающегося стекла весьма разнообразен, но все же максимальное количество частотной составляющей имеется, и расположена она между 4,2 и 4,9 кГц.
Структурная схема электроакустического датчик представлена на рисунке 1.

Рис. 1. Структурная схема электроакустического датчика
Технические характеристики:
- напряжение питания от 10 до 26 В;
- потребляемый ток от 40 до 90 мА;
- время установки в дежурный режим не более 2 с;
- время фиксации сигнала тревоги от 30 до 240 с.
Прибор состоит из предварительного линейного усилителя, активного фильтра, формирователя сигнала тревоги и таймера срабатывания. В качестве микрофона используется электретный микрофон импортного производства.
На транзисторе VT2 собран первый каскад активного фильтра и представляет собой низкодобротный фильтр, имеющий небольшой коэффициент усиления. Выбор именно этого схемотехнического решения обоснован тем, что на начальных этапах усиления необходимо захватить немного больший диапазон частот, чтобы в дальнейшем имелся небольшой запас частотных составляющих усиливаемого сигнала.
На микросхеме DA2 собран высокодобротный фильтр с регулируемой полосой пропускания. Использование именно этого фильтра позволяет изменением одного номинала в широких пределах изменять полосу пропускания . Последовательное соединение обоих фильтров позволило избавиться от низкочастотной и высокочастотной составляющих звукового сигнала — на выходе появляется только сигнал, необходимый для контроля.
При отсутствии сигнала с фильтра-усилителя на втором входе DD2.4 присутствует уровень лог. 0, что будет поддерживать на выходе этого элемента уровень лог. 1. Уровень 0 с выхода DD2.2 «удержит» лог. 1 на выходе DD2.3, и это состояние не изменится, пока не появится звуковой сигнал требуемой частоты и уровня. Уровень лог. 1 на выходе элемента DD2.4, пройдя токоограничивающий резистор R16, откроет транзистор VT3, и контакты реле К1 замкнутся, что восстановит шлейф (линию) сигнализации.
Как только произойдет разрушение стекла в зоне чувствительности прибора, звуковой сигнал вызовет появление лог. 1 на входе DD2.4 и на его выходе сформируется «0». Это повлечет появление «1» на выходе DD2.2, а поскольку на первом входе DD2.3 уже имеется лог. 1, то на его выходе появится уровень «0». Таким образом, триггер изменит свое состояние, и даже при пропадании звукового сигнала он будет оставаться в этом состоянии, поскольку лог. 0 с выхода DD2.3 не позволит изменить уровень выходного напряжения DD2.2. С появлением на выходе DD2.4 лог. 0 транзистор VT3 закроется, реле К1 разомкнет свои контакты и прибор, следящий за целостностью шлейфа сигнализации, выдаст сигнал тревоги.
При разрешении работы и появлении импульсов на тактовом входе счетчик DD1 начинает «обратный» отсчет времени и помимо этого будет прерывисто светиться индикатор HL2, означающий, что прибор недавно был в состоянии «ТРЕВОГА». Введение подобного таймера объясняется тем, что момент срабатывания очень не продолжителен, и выяснить, какой именно прибор сработал, практически невозможно.
Питание устройства осуществляется от внешнего источника с выходным напряжением от 10 до 26 В. В устройстве предусмотрен свой собственный стабилизатор на DA1 (с выходным напряжение 9 В), которым собственно и питается само устройство.
Особенностью данного устройства является малая цена в сравнении с аналогами при достаточно высоких характеристиках и надежности.
Список литературы
1. Статья о датчике – Электр. Дан. – Режим доступа: http://ru.wikipedia.org/wiki/Датчик
2. Охранная сигнализация и ее датчики – Электр. Дан. – Режим доступа: http://poremontu.ru/arcticles/ohrannaya-signalizatsiya-i-ee-datchiki
3. Проектирование и технология радиоэлектронных средств: разработка конструкции изделий РЭС: учеб. пособие / И.А. Злобина, В.А. Муратов, Л.С. Очнева, А.А. Соболев. Воронеж: ГОУВПО «Воронежский государственный технический университет», 2006. Ч. 1. 153 с.
4. Пирогова Е.В. Проектирование и технология печатных плат: учебник / Е.В. Пирогова – М.: ФОРУМ: ИНФРА-М, 2005. 560 с.
5. Проектирование и технология радиоэлектронных средств: проектирование технологии изготовлении изделий РЭС: учеб. пособие / И.А. Злобина, В.А. Воронеж: ГОУВПО «Воронежский государственный технический университет», 2005. 145 с.
Воронежский государственный технический университет
УДК 681.3
С.П. Теплинских, И.В. Андреев
Акселерометр на поверхностных акустических волнах
Акселерометр на поверхностных акустических волнах предназначен для измерений линейных ускорений.
Акселерометры на поверхностных акустических волнах (ПАВ) представляют собой перспективный класс микроакселерометров фазового и особенно частотного типа, позволяющих реализовать высокий уровень конструктивной интеграции, обеспечить высокую устойчивость к внешним возмущениям, возможность существенного сокращения числа деталей и соединений между ними [1]. Они обеспечивают возможность перекрытия без компенсации широкого рабочего диапазона ускорений (до 10g) при частотной форме выходного сигнала.
Акселерометр (рисунок 1) представляет собой монолитную квазисимметричную конструкцию из двух консольных балок 1 и 3 с инерционным грузом 4 на конце подвижной балки. На поверхности консольных балок 1 и 3 располагаются линии задержки 2 (ЛЗ) на основе встречно-штыревых преобразователей (ВШП) [3].
Для погашения объемных акустических волн и увеличения точности измерения ускорения акселерометром подвижная пластина 3 имеет изменяющееся сечение (косой срез).
Схема ЛЗ изображена на рисунок 2. Балки 1 и 3 исполняют роль звукопроводов. Одна консоль является опорной (эталонной), и для того, чтобы избежать ее деформации под действием ускорения, она приклеена к опоре, которая в свою очередь крепится к корпусу. Система имеет два входных (6) и два выходных (7) ВШП для реализации схемы с частотным выходным сигналом (Δf). На схеме показана также опора 5, на которой будет располагаться акселерометр. Ось чувствительности направлена перпендикулярно консольным балкам 1 и 3, плоскости опоры 5 и совпадает с направлением оси z.

Рис. 1. Акселерометр с частотным выходом

Рис. 2. Структурная схема линии задержки, содержащая два идентичных встречно-штыревых преобразователя
Для расчета линии задержки использовался современный COM метод [2], результаты которого близки к экспериментальным результатам. Факторы: аподизация, неоднородное распределние поверхностного заряда на электродах структуры – достаточно просто могут быть учтены в рамках модифицированного COM метода, оперирующего элементарным звеном структуры (одним электродом ВШП). Параметры ПАВ структуры в целом (ВШП, ОС или их произвольной комбинации) определяются путем перемножения соответствующих Р-матриц отдельных электродов (как это делается в обычной теории четырехполюсников с использованием матрицы рассеяния.
В основу построения чувствительных элементов на ПАВ положена зависимость их скорости от деформации подложки, которая в свою очередь зависит от ускорения [5]. На поверхности балок располагаются линии задержки, выполненные методом обратной фотолитографии, на основе встречно-штырьевых преобразователей. Между ВШП отдельных линий задержки располагаются экраны для уменьшения электромагнитной наводки.
В качестве материала звукопровода выбран кварц ST-среза с ориентацией подложки и направлением распространением – YXl/42,750, причем верхняя поверхность звукопровода должна быть полирована [4]. Кварц ST-среза обеспечивает максимальную температурную стабильность сигнала в рабочем интервале температуре. Отдельно была разработана конструкция корпуса акселерометра, куда входят отдельные элементы: крышка, основание, бусы, выводы. Корпус выполнен из прецизионного сплава Лента 47НД-М-0-1.5 (медно-никелевая лента). Основание корпуса выполняется штамповкой, крышка вытяжкой. Корпус акселерометра имеет 7 выводов, один из которых земляной. Выводы, выполненные из прецизионного никель-кобальтового сплава, изолированы стеклянными бусами. Материал корпуса, выводов и бус выбирался с учетом их температурных коэффициентов линейного расширения (ТКЛР). Герметизация корпуса осуществляется лазерной сваркой.
Технико-экономического анализ показал, что новое устройство обладает достаточно высокими функциональными и техническими характеристиками, поэтому акселерометр на ПАВ будет конкурентоспособным в условиях рыночной экономики. Представленная конструкция акселерометра позволяет использовать его в составе современной бортовой радиоаппаратуры.
Литература
1 Андреев И.В. Устройства частотной селекции на поверхностных акустических волнах для беспроводных и мобильных технологий: учеб. пособие для вузов / И.В. Андреев, А.И. Андреев. – Воронеж: ГОУВПО «Воронежский государственный технический университет», 2010. – 168 с.
2 Дмитриев В.Ф. Теория связанных волн – универсальный метод расчета устройств на поверхностных акустических волнах / В.Ф. Дмитриев. – Спб.: Жур. технической физики, Т. 10. №10. 2004. – 8 с.
3 Лукьянов Д.П. Микроакселерометр на поверхностных акустических волнах / Д.П. Лукьянов. – СПб. ГЭУ: Жур. Элементы МСТ и микросистемы, №2.2001. – 7 с.
4 Морган Д. Устройства обработка сигналов на поверхностных акустических волнах: пер. с англ. / Д. Морган. – М.: Радио и связь, 1990. – 416 с.
5 Распопов В.А. Принципы построения и конструкции акселерометров / В.А. Распопов. – М.: Жур. Датчики и системы, №7.2005. – 12 с.
Воронежский государственный технический университет
УДК 681.3
А.Б.Карпелянская, В.А. Кондусов
Стробоскопический тахометр
Стробоскопический тахометр предназначен для бесконтактного измерения частоты вращения.
В настоящее время тахометры нашли широкое применение для контроля частоты вращения коленчатого вала двигателей внутреннего сгорания практически на всех типах транспортных средств: автомобилях, тракторах, тепловозах, судах, самолётах, применяются для контроля частоты вращения рабочих органов технологических машин, могут использоваться в качестве счетчика импульсов, например, при подсчете продукции на конвейере, расхода сырья, материалов, времени наработки оборудования, машин и механизмов при испытаниях и обкатке.
Стробоскопические тахометры позволяют измерять скорость видимых, но труднодоступных объектов, в том числе скорость маломощных объектов без всякого воздействия на них со стороны прибора, а также можно измерить частоту колебаний объекта.
Стробоскопический тахометр разрабатывался в первую очередь для лабораторных работ по исследованию характеристик микроэлектродвигателей малых мощностей, но так же может использоваться в качестве и счетчика импульсов на конвейере, в автомастерских для начальной установки момента зажигания, на заводах машиностроения и приборостроения, для ремонта и наладки технологических машин и станков.
Структурная схема тахометра представлена на рисунке 1.
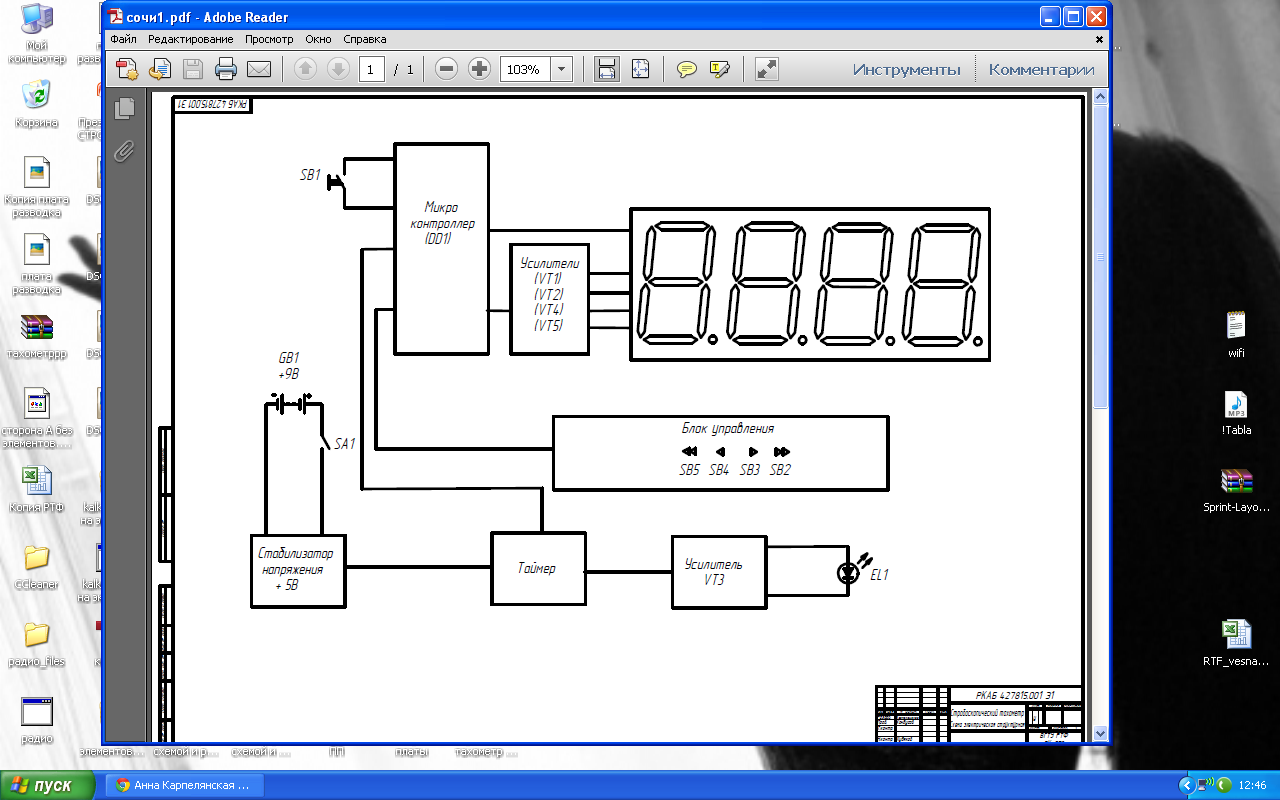
Рис. 1. Структурная схема стробоскопического тахометра
Принцип работы следующий: устройство вырабатывает короткие вспышки света, частоту повторения которых можно регулировать от 2,5 до 100 Гц, что позволяет визуально «остановить» одиночную метку, нанесенную на объект, вращающийся с частотой от 150 до 6000 об/мин. Именно в этих единицах установленное значение частоты выводится на цифровой индикатор прибора.
Тахометр собран на микроконтроллере DD1(микросхема Attiny 2313), тактовая частота которого (10 МГц). Вывод сигналов происходит через усилители (транзисторы VT1, VT2. VT4, VT5), которые подключены к индикатору HG1 (RL-F5620GDBW). Одновременно с переключением знакомест индикатора микроконтроллер проверяет состояние кнопок SB2—SB5. Их контакты подключены к входу микроконтроллера. Нажатиями на эти кнопки изменяют частоту импульсов, формируемых микроконтроллером на выходе. Сразу после включения питания или нажатия на кнопку SB1 частота импульсов на этом выходе равна 25 Гц (1500 мин-1). Для генерации импульсов программа настраивает шестнадцатиразрядный таймер микроконтроллера на работу, который увеличивает длительность этих импульсов до 2 мс. Импульсы с выхода таймера, усиленные транзистором VT3, поступают на излучающий диод EL1.
Питание осуществляется от батарейки типа «крона» либо от внешнего источника питания.
Конструкция.
ЭРЭ стробоскопического тахометра размещаются на двусторонней печатной плате. Печатная плата изготовлена комбинированным позитивным методом из двухстороннего фольгированного стеклотекстолита марки СФ-2-35-1,5. Получение печатных проводников осуществлено сеточно-графическим способом. Конструкция печатной платы позволяет применять при производстве типовые технологические процессы. Выбранный материал для изготовления печатной платы сохраняет свои свойства при температурах от –60 до 150°С. Электрорадиоэлементы располагаются с двух сторон печатной платы.
Корпус покупной (G1202), доработан в соответствии с конструкцией. В комплект к тахометру предоставлены: сетевой адаптер (БПС-9-0,35А) и светодиодный фонарик (Camelion 0307), которые вместе с тахометром уложены в сумку PC PET Panorama 2903.
При анализе рынка и по экономическим расчетам было установлено, что данный стробоскопический тахометр является конкурентоспособным в современных экономических условиях, более того, он превосходит по экономическим показателям своего конкурента – стробоскопический тахометр testo DT2240B стоимостью 6500 р. Стоимость же разрабатываемого тахометра составляет 1961 р. Кроме этого, стробоскопический тахометр превосходит абсолютно всех конкурентов по массе, которая составляет 0,1 кг, тогда как вес самого «легкого» конкурента составляет 0,9 кг; также ни один конкурент не дает возможности подключения к внешнему источнику питания, т. е. питаются либо от батареек (3-4 штуки типа ААА) либо от аккумуляторов и ни у одного конкурента не имеется дополнительного осветителя, что не позволяет работать с устройством при плохом освещении.
Эти особенности являются «изюминкой» стробоскопического тахометра и, несомненно, привлекают потребителя не только по функциональным возможностям, но и «не бьют по карману» экономически.
Воронежский государственный технический университет
УДК 681.3
И.В. Попова, А.В. Турецкий
КОНСТРУКЦИЯ БЛОКА ПИТАНИЯ ДЛЯ ВОЗИМОЙ РАДИОСТАНЦИИ
Рассматривается принцип раьоты и конструктолрское решение блока питания для возимой радиостанции
Блок питания - сердце любой системы радиосвязи в которой есть базовые радиостанции или ретрансляторы. Блоки питания бывают: настольные, для установки в стойку, с возможностью подключения резервной батареи, встраиваемые в корпуса машин или в корпуса самих радиостанций и т.д. [1].
Главное назначение блоков питания - преобразование электрической энергии, поступающей из сети переменного тока, в энергию, пригодную для питания радиостанций.
В статье рассматриваются вопросы разработки компактного и надежного встраемого блока питания для возимой радиостанции, с учетом требований современного производства и технологии.
Разработанный блок питания отличается наличием современной элементной базы, усовершенствованной конструкцией и улучшенными электрическими характеристиками по сравнению с аналогами, чем и определяется актуальность темы.
Блок питания является составной частью возимой радиостанции. Данная радиостанция предназначена для обеспечения дуплексной связью абонентов подвижных объектов в сетях радиоподвижных систем связи на территории Российской Федерации.
Блок РТ-36ПТ питается от бортовой сети постоянного тока с заземленным минусом напряжением от 10,8 до 15 В с уровнем пульсации до Uэфф = 300 мВ.
Блок РТ-36ПТ имеет соединитель для подключения приемо-передатчика с устройством автоматики и коммутации, с параметрами выходного напряжения:
- 12 В (Iпотр ≤ 8А, с уровнем пульсаций до Uэфф= 50 мВ);
- 6 В (Iпотр ≤ 1,5 А, с уровнем пульсаций до Uэфф= 50 мВ).
Блок РТ-36 ПТ включается с пульта управления. Включение происходит при замыкании автомата защиты сети S1 и реле К1.
Схема электрическая принципиальная блока питания состоит из основной печатной платы А1, двух модулей питания G1 и G2, двух модулей фильтров Z1 и Z2 и автомата защиты сети S1.
Унифицированные источники вторичного электропитания в модульном исполнении (далее модули) G1 и G2 с питанием от сети постоянного тока напряжением 12 В представляют собой стабилизированный преобразователь с галь-ванической развязкой между входом, корпусом и выходом. Частота преобразования находится в пределах от 90 до 120 кГц.
Модули имеют защиту от превышения напряжения на выходе. Защита модуля G1 срабатывает при превышении величины выходного напряжения на 20 %, а модуля G2 – на 50 % от его номинального значения.
Модули имеет защиту от короткого замыкания в цепи нагрузки с последующим автоматическим возвратом в режиме стабилизации напряжения после снятия короткого замыкания.
Z1 и Z2 – сверхминиатюрные изолированные DC/DC модули электропитания. Их максимальная входная мощность достигает 40 Вт. При этом модули способны работать в широком диапазоне температур ( от минус 60 до плюс 125 0С). Они имеют один гальванически развязанный выходной канал, могут включаться и выключаться по команде, имеют полный комплекс защит от перегрузки по току, короткого замыкания, перегрева, могут включаться параллельно и последовательно по выходам.
Модули Z1 и Z2 уменьшают помехи (пульсации) модулей G1 и G2 соответственно.
Электрическая защита реализована на силовых микросхемах D1-D4, выключающих нагрузку, подключенную к Х6-Х9. Работа каждой нагрузки индуцируется светодиодами HL6-HL9.
Дроссели L1, L2 и конденсаторы C1, C2, C3, C4, C6, C7 предназначены для дополнительной фильтрации.
Блок защищен от перегрузки диодом VD1.
Х2 и Х3 – разъемы для телефонной трубки. При поднятии трубки отключаются все нагрузки.
Х6 – Х9 – дополнительные нагрузки, в которые можно подключать магнитофоны, рации, различные зарядные устройства.
Для защиты устройства от перегрузки по току или от перегрева в блоке установлены самовосстанавливающиеся предохранители F1-F4. Принцип их работы основан на свойстве резко увеличивать свое сопротивление под воздействием проходящего тока или температуры окружающей среды и автоматически восстанавливать свои первоначальные свойства после устранения этих причин.

Рис. 1. Схема электрическая принципиальная блока питания
Полимерный самовосстанавливающийся предохранитель представляет собой матрицу из непроводящего ток полимера, смешанного с техническим углеродом. В холодном состоянии полимер кристаллизован, а пространство между кристаллами заполнено частицами углерода, образующими множество проводящих цепочек. Если через предохранитель начинает протекать слишком большой ток, он начинает нагреваться, и в какой-то момент времени полимер переходит в аморфное состояние, увеличиваясь в размерах. Из-за этого увеличения углеродные цепочки начинают разрываться, что вызывает рост сопротивления, и предохранитель нагревается еще быстрее. В конце концов сопротивление предохранителя увеличивается настолько, что он начинает заметно ограничивать протекающий ток, защищая таким образом внешнюю цепь. После устранения замыкания, когда протекающий ток снизится до исходного значения, предохранитель остывает и его сопротивление возвращается к начальному значению.
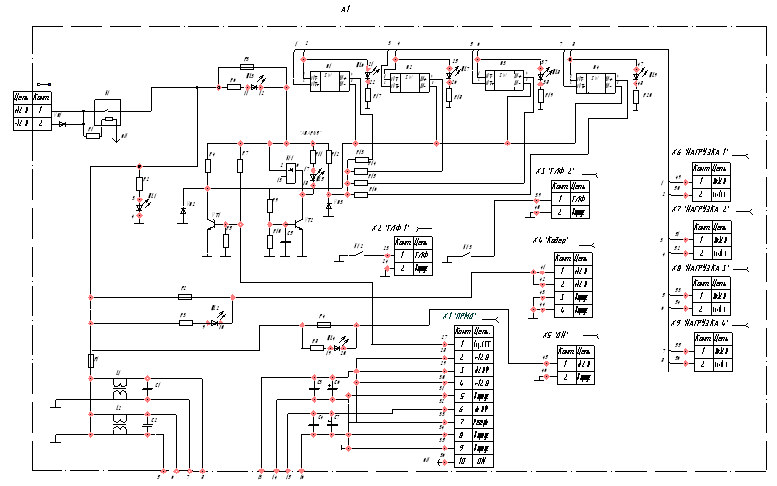
Рис. 2. Схема электрическая принципиальная печатной платы
Конструирование РЭА зависит от большого количества факторов, основными из которых являются: функциональное назначение аппаратуры, объект установки, условия эксплуатации, эксплуатационные требования, производственно-технологические требования, экономические показатели [3].
Так как блок питания будет использоваться для питания радиостанции, то он должен строго соблюдать габаритные показателя, хотя устройство относится к возимой (машина, вертолет) группе, то следовательно, ее массогабаритные показатели являются далеко не последними. Программа выпуска блока терморегулирования составляет 50 изделий в год. Конструкция должна быть разработана так, чтобы изделие было технологичным при указанной программе выпуска обеспечивать минимально возможную массу.
Необходимо отметить, что при создании несущих конструкций следует придерживаться правил:
- выполнять все элементы конструкции равнопрочными без большого запаса по прочности;
- обеспечивать высокую жесткость способами, не требующими увеличения массы;
- упрощать несущую конструкцию до наименьшего числа деталей;
- широко применять легкие сплавы и пластмассы;
- выбирать рациональную форму профилей несущих конструкций;
- вводить в детали различные отверстия, выемки, проточки, чтобы избежать лишнего материала, не несущего нагрузки;
- вводить в тонколистовые детали отбортовки и выдавки, позволяющие повысить жесткость конструкции;
- использовать гальванические и лакокрасочные покрытия, имеющие минимальную массу.
К корпусу блока питания предъявляются достаточно высокие требования. Он должен обеспечивать: жесткое закрепление плат и соединения их выводов с переходами, предназначенными для связи с внешними цепями; защиту плат и ЭРЭ от механических, климатических и других воздействий; экранирование схемы от внешних электромагнитных излучений и наводок.
Основываясь на этих требованиях, а также на сложившемся подходе к конструктивному исполнению изделий РЭС, с учетом унификации, нормализации и технологичности целесообразно выполнить блок питания в виде разъемной конструкции прямоугольной формы, обеспечивающей простоту и надежность установки.
При разработке изделия необходимо выбирать методы конструирования, обеспечивающие снижение стоимости, в том числе и энергоемкости; уменьшение объема и массы; расширения области использования микроэлектронной базы; увеличения степени интеграции, микро миниатюризации межэлементных соединений и элементов несущих конструкций; высокую технологичность; однородность структуры; максимальное использование стандартизации [5].
Печатная плата устанавливается на каркас и фиксируется пятью винтами. Автомат защиты сети S1 также крепится к каркасу двумя винтами. Также на каркасе расположены две входные клеммы Х1 и Х2.
Модули G1, G2 И модули фильтров Z1,Z2 устанавливаются в каркас на термопасту КПТ-8 и крепятся с помощью винтов.
КПТ8 (кремнийорганиическая паста теплопроводная) используется для улучшения теплопроводности между тепловыделяющими элементами электронных схем (процессоры, силовые транзисторы, диоды) и радиатором. Представляет собой теплостойкую белую массу высокой вязкости. Получается загущением полидиметилсилоксановой жидкости порошком оксида цинка
Каркас выполнен из алюминиевой плиты Д16.Б методом фрезерования. Покрытие – химическое оксидирование, а наружные поверхности изделия покрыты черной эмалью МЛ-165. Химическое оксидирование применяют для защиты от коррозии алюминия, на это покрытие также легко ложится краска из-за пористой структуры.
На нижней стороне каркаса выполнены ребра, предназначенные для охлаждения модулей питания G1,G2 и модулей фильтров Z1,Z2.
Крышка крепится к каркасу с помощью четырех невыпадающих винтов. Для герметизации между крышкой и каркасом проложен резиновый жгут.
Основание представляет собой гнутую пластину, на которой зафиксированы с помощью винтов угольники. Основание предназначено для жесткой фиксации блока на шасси.
ЭРЭ размещаются на одной двусторонней печатной плате. Это позволяет повысить надежность устройства и облегчает сборку и регулировку, одновременно уменьшив габариты устройства. В качестве метода изготовления ПП выбираем в зависимости от сложности схемы, конструктивно-технологических требований к изделию. Таким образом подходит комбинированный позитивный метод. Двусторонняя печатная плата изготавливается комбинированным позитивным методом, основанным на применении фольгированного диэлектрика.
В плате предусмотрены вырезы для автомата защиты сети S1, два выреза для стоек каркаса и вырез для модуля G1. для крепления ПП предусмотрены пять отверстий диаметром 3,6 мм.
На мощные ключевые микросхемы устанавливаются радиаторы с применением теплопроводящей пасты КПТ-8. Светодиоды и соединители устанавливаются угольник, который фиксируются к ПП винтами. Выводы всех соединителей и светодиодов подпаиваются с помощью проводов.
Все устройство размещается в багажнике автомобиле в специальной стойке возле радиостанции на общем шасси и фиксируется к основанию с помощью винтов.

Рис. 3. Блок питания для радиостанции
Литература
Электронный каталог Источники питания – Электрон. дан. – Режим доступа: http:// issh.ru
Электронный каталог Блоки питания для радиостанций – Электрон. дан. – Режим доступа: http://www.vebr.vrn.ru
Электронный каталог Промышленная автоматика – Электрон. дан.– Режим доступа: http://www.vecon.ru
Проектирование и технология радиоэлектронных средств: разработка конструкции изделий РЭС: учеб. пособие / И.А. Бейнар, В.А. Муратов, Л.С. Очнева, А.А. Соболев. Воронеж: ГОУВПО «Воронежский государственный технический университет», 2006. Ч. 1. 147 с.
УДК 681.3
А.О. Горшков
стабилизатор напряжения с регулируемой защитой по току
Темой доклада является стабилизатор напряжения с регулируемой защитой по току
В современном мире огромное разнообразие различных источников питания. В большинстве своем они выдают один или несколько заранее заданных уровней напряжения, которые нельзя тонко регулировать. Однако для научных и лабораторных целей необходим источник питания с возможностью плавной регулировки его выходного напряжения. Большинство источников питания не имеют такой возможности. В связи с этим используют стабилизатор напряжения, подключаемый к источнику питания. Благодаря этому устройству, выходное напряжение можно плавно регулировать.
Темой доклада является стабилизатор напряжения с регулируемой защитой по току. Данное устройство позволяет регулировать стабильное выходное напряжение в интервале от 0 до 25,5 В дискретно с шагом 0,1 В, поэтому его можно использовать как лабораторный блок питания. Кроме того, стабилизатор напряжения снабжен защитой по току, порог срабатывания которого можно устанавливать плавно в интервале от 0,2 до 2 А[1].
На рисунке 1 показана схема электрическая принципиальная данного устройства. Счетчики DD2 и DD3 формируют цифровой код выходного напряжения. Прецизионные резисторы R8–R15, R17–R23, R25 образуют ЦАП.

Рис. 1. Схема электрическая принципиальная стабилизатора напряжения
На вход стабилизатора подается напряжение от 26 до 45 вольт, которое преобразуется в 18 В (к блоку индикации) и 5 В (к остальным элементам).
Функциональная схема стабилизатора напряжения представлена на рисунке 2.

Рис. 2. Функциональная схема стабилизатора напряжения
Изменение состояний счетчиков DD2 и DD3, образующих формирователь цифрового кода, осуществляется кнопками SB1 иSB2. Если ни одна из этих кнопок не нажата, то блокируется работа генератора, соединенного со счетным входом счетчиков, и их состояние не изменяется.При нажатии на кнопку SB1 или SB2,с помощью логических элементов, разрешается работа генератора. В результате происходит увеличение или уменьшение кода счетчиков на единицу.
Кнопкой SB3 выбирают режим регулировки. Если она не нажата, то осуществляется плавная регулировка с шагом 0,1 В, а если нажата, то скорость регулирования возрастет в 16 раз.
Кнопкой SB4 осуществляют оперативное отключение выходного напряжения стабилизатора.
После формирования цифрового кода информация передается к блоку индикации.
ЦАП на прецизионных резисторах преобразует код счетчиков в ступенчато нарастающее напряжение.Далее происходит необходимое усиление по току и напряжению.
Также в устройстве предусмотрен электронный предохранитель,ток срабатывания которого устанавливают переменным резистором. Максимальный ток срабатывания защиты равен 2 А. Включение электронного предохранителя осуществляется кнопкой SB5.
В результате, на выходе создается стабилизированное напряжение от 0 до 25,5 В.
Печатная плата стабилизатора напряжения представляет собой двусторонний стеклотекстолит. Конструкция платы предусматривает односторонний смешанный монтаж. В плате выполнены 4 отверстия диаметром 3 мм для крепления ее к передней панели при помощи винтов.
Внешне прибор представляет собой единую конструкцию прямоугольной формы. Составными частями корпуса являются детали: основание, крышка и передняя панель.
Основание корпуса изготавливается из стали 08кп методом холодной листовой штамповки и представляет собой лист Г-образной формы с отогнутыми бортами, которые для улучшения жесткости подвергаются пайке в месте их сочленения[2]. На бортах при помощи отбортовки реализованы резьбовые отверстия для соединения крышки с основанием. В передней части основания также проделаны резьбовые отверстия для крепления к основанию передней панели и 4 отверстия для крепления ножек.
Крышка корпуса изготавливается из стали 08кп методом холодной листовой штамповкии представляет собой лист П-образной формы, в боковых стенках которой проделаны отверстия для крепления её к основанию. Также по всей поверхности проделаны овальные перфорированные отверстия для лучшего охлаждения устройства.
Передняя панель изготавливается из ударопрочного полистирола марки УПС-1002 литьем под давлением. В ней предусмотрены 4 бобышки с резьбовыми отверстиями для крепления платы, отверстия для крепления кнопок и клемм и прямоугольное окно для защитного стекла, под которым располагается семисегментный индикатор. В этом окне по периметру располагается паз для крепления защитного стекла. По периметру выполнен паз под стенки крышки и основания. Предусмотрены отверстия для крепления передней панели к основанию и крышке.
Печатная плата крепится к передней панели с помощью 4-х винтов, крышка крепится к основанию при помощи 6-и винтов. Передняя панель крепится к основанию и крышке при помощи 4-х винтов. Транзистор прикрепляется к задней стенке основания через специальную слюду при помощи винта и гайки. Защитное стекло приклеивается к передней панели клеем Cosmofen CA 12.
Дальнейшая модернизация устройства возможна в области минимизации размеров устройства и расширении спектра его свойств.
Литература
1. Озолин М. Стабилизатор напряжения с регулируемой защитой по току/ М. Озолин // Радио. – 2005 – № 8 – С. 29–30.
2. Проектирование и технология радиоэлектронных средств: разработка конструкции изделий РЭС: учеб.пособие / И.А. Злобина, В.А. Муратов, Л.С. Очнева, А.А. Соболев. Воронеж: ФГБОУ ВПО «Воронежский государственный технический университет», 2006. Ч. 1. 153 с.
УДК 681.3
В. В. Иванов, В.С. Скоробогатов, Ю.М. Данилов
О ПАЙКЕ МИКРОСХЕМ
Приводятся результаты исследования влияния температуры пайки на оптимальное время пайки
Процессы лужения и пайки выполняют групповыми методами. В случае плат с электрорадиоэлементами и микросхемами, имеющими штырьковые выводы, используют пайку в потоке — волной припоя. Навесные элементы отделены от расплавленного припоя плоскостью печатной платы. Процесс пайки в потоке припоя основан на погружении в жидкий припой одновременно всех соединений, расположенных в плоскости вдоль линии, совпадающей с вершиной гребня волны. Длина гребня равна ширине платы. Плату перемещают в направлении, перпендикулярном длине гребня. Благодаря приподнятости гребня над поверхностью окислы и шлаки, плавающие па поверхности, скатываются с гребня и его вершина оказывается в значительной степени свободной от загрязнений. Смываются и вновь образуемые шлаки — продукты реакций флюса с окислами и атмосферой. Вторым важным эффектом при пайке в таких условиях является механическое усилие, с каким жидкий припой поступает в зазор формируемого паяного шва.
Температуру в ванне поддерживают на 50° С выше температуры ликвидуса припоя. Для того чтобы ванна обладала достаточным запасом тепла, масса припоя должна примерно в 20 раз превышать массу паяемой платы. Это позволяет пренебречь отводом тепла по плате.
Полное или частичное незаполнение паяльного зазора припоем (непропай), может наблюдаться в тех случаях, когда на плате размещены электрорадиоэлементы различной теплоемкости. В этом случае выводы массивных электрорадиоэлементов не достигают температуры пайки. Для снижения числа непропаев следует применять припои, близкие к эвтектике. Это позволяет исключить пастообразное состояние паяного шва, приводящее к замедленному схватыванию. Для определения времени и температуры качественного облуживания штырьковых выводов были проведены исследования. Исследовалось влияние температуры Т° С на время необходимое для облуживания τ, с. В результате расчетов, выполненных на основании проведенных экспериментов, получена математическая модель процесса
τ = 141,1875 - 0,955 · Т + 0,001625 ·Т 2. (1)
Дифференцируя уравнение (1) имеем
dτ / dТ= - 0,955 + 0,00325 · Т. (2)
Решая уравнение (2), находим экстремальное значение температуры, равное 293,8° С. При этом значении время необходимое для облуживания составит 0,9 с. Однако верхнее значение температуры припоя в ванне должно быть ограничено чтобы снизить загрязнения припоя в результате растворения меди: Для припоя ПОС-61 это значение составляет 265° С. С той же целью и для защиты электрорадиоэлементов и микросхем от перегрева ограничивается продолжительность контакта жидкого припоя с платой в пределах 2,2 ± 0,5 с в зависимости от температуры припоя.
Продолжительность пайки регулируется скоростью движения транспортера в пределах от 1 до 5 см/с. Такая скорость подачи плат обеспечивает производительность установки для пайки от 200 до 800 плат/ч в зависимости от размера плат, взятого в направлении движения транспортера.
При подходе к волне припоя плата должна иметь наклон 8 - 10°, чтобы припой стекал с поверхности, оставаясь на смоченном металле только в виде тонкого слоя. Сечение потока (форма и размеры) определяется соплом.
Формирование волны основано на принципе непрерывной циркуляции припоя в виде стоячей волны при помощи вращающихся поверхностей, погруженных в припой. Вращение осуществляется электродвигателем, вынесенным из зоны высоких температур. Ванна имеет нагреватели, наружную теплоизоляцию и терморегулятор.
Пайка двумя встречными струями позволяет снимать с паяных швов излишки припоя, что важно при малых промежутках между контактными площадками. При движении печатной платы с выводами, первая, основная струя, которая осуществляет пайку, направлена навстречу движению платы. Вторая, вспомогательная струя направлена по движению платы. Ее температура в зоне касания платы должна быть на 10е С выше, чем первой, и она несколько ниже по высоте. Вторая струя предназначена для снятия сосулек и наплывов припоя и формирования правильной формы паяного шва. Расстояние между линиями касания платы обеими струями выбрано так, чтобы обеспечить касание второй струей сразу после кристаллизации паяного шва, полученного в зоне действия первой струи. Важно иметь возможность регулировать помимо расстояния между струями и температуры каждой струи наклон и высоту обеих струй.
Пайке в потоке расплавленного припоя присущи три основных недостатка: прилипание припоя к поверхности диэлектрика, отслаивание фольги под действием нагрева, окисление и изменение рецептуры припоя за время работы.
Припой может прилипать к поверхности диэлектрической основы печатной платы непосредственно или к предварительно прилипшему шлаку, увлеченному волной припоя. Припой прилипает в тех случаях, когда диэлектрик размягчается за время пайки. Это происходит при недополимеризованиой смоле, входящей в состав стеклотекстолита.
Главным средством борьбы с прилипанием припоя к диэлектрической основе являются маски. Маска представляет собой постоянный лаковый слой, наносимый на всю поверхность платы, кроме контактных площадок, подлежащих лужению и пайке. Она защищает от действия припоя не только диэлектрик, но и фольгу, не подвергаемую пайке.
Отслаивание фольги под действием высокой температуры в момент касания потока припоя происходит в тех случаях, когда используют недоброкачественный фольгированный материал, в котором не произошла полная полимеризация эпоксидной смолы, приклеивающей фольгу к диэлектрической основе. При 170° С и выше незаполимеризовавшаяся эпоксидная смола разлагается с выделением водорода {реакция дегидрогенизации). Водород воздействует на окись меди, которая нанесена на фольгу со стороны приклейки (для повышения адгезии). Образующаяся вода переходит в перегретый пар, вызывающий отслоение фольги. Поэтому заготовки из фольгировашюго стеклопластика целесообразно на одном из технологических этапов подвергать термообработке для полной полимеризации эпоксидной смолы. Рационально применять стеклопластик на полиимидпой основе.
Третий недостаток пайки в потоке состоит в окислении припоя и растворении меди в припое при лужении. Оба процесса приводят к нарушению состава припоя, к изменению температуры ликвидуса, отходу от эвтектики.
В результате длительного нагрева при перемешивании расплав интенсивно окисляется. Скорость окисления перемешиваемого припоя выше, чем в состоянии покоя. Олово обладает более высоким сродством к кислороду, чем свинец. Это приводит к восстановлению окисленного свинца:
В результате в оксидном слое преимущественно накапливается двуокись олова, а в ванне количество олова сокращается. Обеднение припоя оловом вызывает перемещение рабочей ординаты на диаграмме состояний влево от эвтектики. Здесь линия ликвидуса идет круче, чем справа от эвтектики, отклонения в составе припоя сильнее влияют на свойства сплава.
Чтобы устранить перемещение рабочей ординаты левее эвтектики, припой заранее обогащают оловом, вначале имея в ванне 70 % Sn - остальное РЬ и поддерживая содержание олова в пределах 60— 70%.
Эффективным средством снижения растворимости меди в припое при лужении является применение масок. Однако за месяц работы накопившаяся растворенная медь и другие примеси постепенно ухудшают паяемость припоя. Поэтому периодически необходимо проверять паяемость припоя по стандартной методике.
Попытки ослабить вредное действие кислорода воздуха с помощью защиты зеркала припоя слоем флюсующей органической жидкости влекут за собой больше отрицательных, чем положительных факторов. Толщина слоя защитной жидкости составляет 5- 10 мм. Ее наносят на зеркало после снятия окислов и шлака и меняют каждую смену. В качестве защитной жидкости применяют масло растительного происхождения с минимальным содержанием воды, глицерин дистиллированный или масло авиационное, стеариновую и олеиновую кислоты. Защитная жидкость ограничивает окисление со стороны поверхности раздела атмосфера — зеркало припоя. Она уменьшает поверхностное натяжение припоя, облегчая стенание с паяемых узлов. Это уменьшает вероятность образования сосулек и наплывов. Введение в состав защитной жидкости активной флюсующей добавки, например НСL, способствует раскислению поверхности припоя. В результате температуру пайки можно снизить на 10° С, снижается расход припоя, поверхность паяных швов приобретает блеск. Однако применение защитной жидкости связано с отрицательными особенностями. Возможен механический захват защитной жидкости и внедрение ее частиц в паяный шов. Сопротивление изоляции поверхности изоляционного основания платы может снижаться по следующим причинам. При защите зеркала припоя глицерином па поверхности диэлектрика образуется: трудно удаляемый белый налет из продуктов взаимодействия с недополимеризованными составляющими диэлектрика. Налет снижает сопротивление изоляции. При использовании растительного масла его плохо удаляемые остатки затрудняют нанесение защитного лака и служат питательной средой для плесени в тропических условиях эксплуатации, что в конечном счете приводит к снижению сопротивления изоляции. Кроме того, масло имеет ограниченный срок службы в ванне из-за термической деструкции.
По этим причинам следует отдать предпочтение пайке в потоке припоя без защитной жидкости, ограничиваясь механическим удалением слоя окислов с поверхности зеркала припоя и забором припоя с нижних слоев.
Для пайки в потоке припоя применяют агрегатированную конвейерную линию из агрегатов флюсования, подогрева, пайки, мойки и сушки, связанную одним транспортером. Агрегат флюсования работает со вспениванием путем продувания воздуха. Касаясь флюсуемой поверхности, пузырьки лопаются и смачивают поверхность пленкой требуемой минимальной (3—5 мкм) толщины. При других способах нанесения толщина пленки значительно больше. Малая толщина пленки позволяет сократить потери тепла на удаление флюса и излишнее парообразование токсичных веществ, входящих во флюс.
Для подогрева (как и для сушки) в современных агрегатах используют ИК облучение. Подогрев перед пайкой необходим для подсушки флюса, удаления захваченных газов и подготовки платы к тепловому удару при касании потока припоя. При этом значительно снижается вероятность образования сосулек и наплывов припоя. Эти дефекты могут возникать также из-за низкой температуры пайки и ее кратковременности, плохой растекаемости припоя, быстрого выхода из волны, малой активности флюса, нарушения рецептуры припоя в ванне.
Чтобы избежать коробления плат при термических нагрузках во время обработки в агрегате платы в транспортере должны быть закреплены в рамках-держателях по всему периметру, но так, чтобы не мешать движению потока припоя.
Критерием рентабельности машинной пайки является число паяных швов вывод — отверстие, требующих дополнительной ручной пайки из-за непропая. Машинная пайкасчитается вполне рентабельной, если необходимо дорабатывать 1% всех паяных швов.
Воронежский государственный технический университет
УДК 681.3
Е.Н. Циблиев, В.С. Скоробогатов, Ю.М. Данилов
ГЕРМЕТИЗАЦИЯ ТРАНЗИСТОРОВ И МИКРОСХЕМ
Представлен процесс герметизация транзисторов и микросхем холодной сваркой
Надежность полупроводниковых приборов и интегральных микросхем при работе в аппаратуре и хранении в значительной степени зависит от герметичности корпуса.
Герметизация — одна из завершающих операций технологического процесса производства полупроводниковых приборов, так как обеспечивает их долголетнюю работу при механических и климатических воздействиях. Кроме того, она является последней операцией сборки полупроводниковых приборов, от качества которой зависит выход годных изделий.
Постоянное стремление к повышению компактности, миниатюризации и быстродействию электронных систем вызывает увеличение плотности рассеиваемой мощности (особенно в микросхемах), что усложняет теплоотвод от активных компонентов и предъявляет дополнительные требования к конструкции корпусов и способам их герметизации.
Герметизация и конструктивное исполнение корпусов являются не менее сложной проблемой, чем создание работающего кристалла.
Хорошо известно, что проникновение в корпус полупроводниковых приборов и микросхем незначительного количества влаги приводит к деградации электрических параметров и коррозии металлизации.
Под герметизацией прибора или микросхемы обычно понимают комплекс мер по обеспечению работоспособности ' изделий при их изготовлении, хранении и последующей длительной эксплуатации. Для этой цели могут быть использованы широкая номенклатура материалов и различные способы герметизации, реализованы разные конструктивные решения. При этом все герметизируемые изделия можно разделить на две группы: полые конструкции, в которых рабочая поверхность изделия не контактирует непосредственно с герметизирующим материалом, и конструкции без внутренних газовых полостей, в которых герметизирующий материал контактирует с рабочей поверхностью изделия (монолитные конструкции).
К первой группе относят металлостеклянные, металло-керамические, пластмассовые и другие корпуса, ко второй — бескорпусные изделия и монолитные пластмассовые корпуса.
Необходимо различать понятия внешней и окружающей сред. Среду, в которой хранят и эксплуатируют приборы и микросхемы, называют внешней, а среду, ограниченную поверхностью герметизирующей конструкции (среда внутри корпуса),— окружающей.
Хотя герметизация в полые корпуса является технически оправданной, использование их усложняет сборку изделий, затрудняя ее механизацию и автоматизацию. Объем и. масса корпусов часто в десятки, а иногда в сотни раз превышают объем и массу герметизируемых изделий, что не согласуется с требованиями микроминиатюризации. Поэтому герметизация в полые корпуса используется тогда, когда к изделиям предъявляют особенно жесткие требования.
Существует большое количество способов корпусной герметизации полупроводниковых приборов и интегральных микросхем. В зависимости от типа корпуса и предъявляемых требований герметизация может осуществляться пайкой, холодной сваркой, электроконтактной сваркой, сваркой плавлением и др. В полупроводниковой промышленности наиболее распространены способы герметизации холодной и электроконтактной сваркой и пайкой.
Среди различных способов получения неразъемных соединений большое распространение получила холодная сварка. Отличаясь простотой и доступностью, она позволяет осуществлять прочные и надежные соединения. Холодной сваркой можно соединять не только однородные, но и разнородные металлы.
Этот способ применяется в основном для герметизации металлостеклянных корпусов транзисторов и диодов средней и большой мощности, выполняемых из металлов с высокой теплоэлектропроводностью.
В основу холодной сварки положена пластическая деформация свариваемых металлов при нормальной температуре под действием большого давления, при которой чистые поверхности, вступая в контакт друг с другом, образуют цельнометаллические соединения с непрерывной кристаллической структурой.
Достоинством способа холодной сварки является отсутствие нагрева при герметизации и сопровождающего его явления - выделения газов внутри объёма.
В полупроводниковом производстве для герметизации корпусов применяют чаще холодную сварку, образующую нахлесточное соединение - точечную холодную сварку по замкнутому контуру(периметру, силами Р, направленными перпендикулярно свариваемой поверхности и значительно реже – холодную сварку сдвигом или продавливанием при одновременном действии нормальных тангенциальных усилий.
Особенностью способа герметизации холодной сваркой является значительная деформация околошовной зоны с сильным искажением формы детали. Деформация может передаваться в другие части детали и достигать зон металло-стеклянных и металлокерамических спаев и мест крепления полупроводниковых кристаллов. Это может вызвать разрушение спаев, ухудшение контакта полупроводникового кристалла с держателем (фланцем), растрескивание полупроводникового материала с изменением электрических параметров приборов.
Особенностью холодной сварки является сравнительно малый рабочий ход инструмента (до 5 мм), что позволяет упрощать конструкцию оборудования и повышать его производительность. В массовом производстве для герметизации корпусов диаметром до 30—40 мм применяют специализированные установки.
Из-за трудности автоматической загрузки деталей корпусов (с собранной внутренней арматурой приборов) в основном применяют полуавтоматические установки с ручной загрузкой, автоматическим проведением процесса герметизации и автоматической выгрузкой, являющиеся полуавтоматами. Полуавтоматы представляют собой механизм периодического действия карусельного типа (рис. а, б, в).
Весь механизм компактно смонтирован на литой станине (внутри которой помещена гидросистема) и закрыт скафандром, обеспечивающим при необходимости сварку в контролируемой среде. Скафандр служит для создания микроклимата при герметизации корпусов, полупроводниковых приборов и представляет собой сварной металлический каркас, закрытый органическим стеклом с резиновыми уплотнителями. В передней стенке скафандра имеются два отверстия, на обечайки которых надеты резиновые перчатки. Герметизированные приборы подают в скафандр и извлекают из него через два шлюза 12. При герметизации скафандр заполняют инертным газом или осушенным воздухом. Двенадцатипозиционная карусель 8 служит для перемещения установленных в ее гнезда полупроводниковых приборов к месту сварки и к месту их выгрузки из сварочного инструмента. Холодную сварку выполняют только на одной позиции. Поршень приводится в движение маслом, поступающим по маслопроводам 25 от лопастного насоса 20. Гидравлическая система (рис. в) работает следующим образом. При рабочем ходе масло поступает под поршень, который поднимается вверх и сжимает сварочный инструмент, находящийся в этот момент между штоком поршня и траверсой 1, закрепленной на двух колонках. При этом масло из верхней полости гидроцилиндра сливается в бак. При обратном ходе поршня золотник 15 перемещается и масло по маслопроводам поступает в верхнюю полость цилиндра; поршень опускается вниз, давление с пуансонов снимается и масло из нижней полости цилиндра сливается в бак.
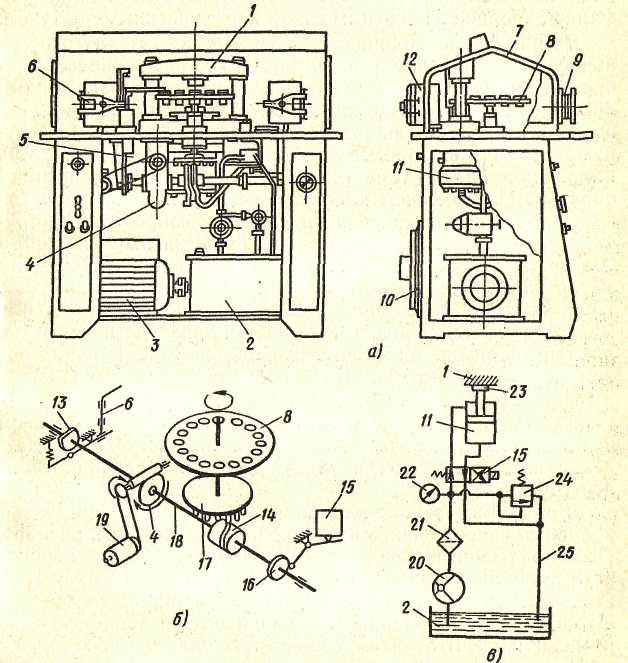
Рис. 1. Полуавтомат для герметизации полупроводниковых приборов холодной сваркой:
а - устройство, 6 - кинематическая схема, в - схема гидравлической системы; 1- траверса, 2 - бак, 3, 19 - электродвигатели, 4- редуктор, 5 - клиноременная передача, 6 - механизм разгрузки, 7 - скафандр,8 - карусель, 9 - отверстие для загрузки, 10 - коробка с электрооборудованием, 11 - гидроцилиндр, 12 - шлюз, 13,16 - кулачки, 14 - улитка, 15 - золотник, 17 - диск с роликами, 18 - распределительный вал, 20 - насос, 21 - фильтр, 22 - манометр, 23 - инструмент, 24 - предохранительный клапан, 25 - маслопровод.
Предохранительный клапан 24 с переливным золотником предназначен для поддержания заданного постоянного давления в гидросистеме, а также для предохранения ее от перегрузки.
Для герметизации алюминиевых корпусов применяют холодную сварку сдвигом или продавливанием. Подготовленное под холодную сварку основание 5 корпуса вставляют в матрицу 4, и оно фиксируется по ее цилиндрической поверхности. Над основанием 5 помещается лента 3. Пуансон 1 при движении вниз вначале производит вытяжку крышки из ленты, затем совместную пластическую деформацию стенок основания и крышки, т. е. осуществляется холодная сварка сдвигом (продавливанием).
При дальнейшем движении вниз пуансон своим режущим плоским пояском 7 вырубает крышку из ленты 3 и в конце рабочего хода вытягивает через матрицу герметизированный прибор 6. При движении пуансона вверх съемник 2 отделяет от него ленту. Сварной шов при такой сварке не выходит за пределы образующей цилиндрической части корпуса.
При холодной сварке сдвигом на соединенных деталях не образуется вмятин и углублений, а в месте сварки не уменьшается площадь поперечного сечения, т. е. пластическая деформация происходит в очень тонких слоях металлов, прилегающих к поверхности раздела соединения элементов.
Воронежский государственный технический университет
УДК 681.3
Данилов Ю. М., Прилепин Д.А., Скоробогатов В.С.
УСТРОЙСТВО ОБНАРУЖЕНИЯ ДЫМА
Рассматривается принцип действия и структурная схема устройства обнаружения дыма
Защита от пожаров квартир, офисов, промышленных и других объектов в настоящее время остается актуальной проблемой. Пожары наносят не только большой материальный ущерб, но и уносят человеческие жизни. Создание эффективных, дешевых устройств пожарной сигнализации является важной задачей.
На промышленных объектах, квартирах и офисах в настоящее время в основном используются для сигнализации о пожаре тепловые датчики, так как они наиболее дешевы. Особенность их устройства такова, что они подают сигнал тревоги тогда, когда температура в зоне пожара достигает высокого значения, т.е. когда охраняемое помещение уже значительно повреждено.
Наиболее надежны и удобны, по мнению пожарных, считаются датчики, срабатывающие на дым, но их применение ограничивается более высокой ценой по сравнению с тепловыми датчиками. Поэтому разработка дешевых устройств пожарной сигнализации с датчиками дыма является неотложной задачей.
Структурная схема одного из вариантов выполнения недорогого устройства пожарной сигнализации с датчиком дыма приведена на рисунке.

Схема состоит из следующих составных частей:
- генератора электрических импульсов,
- формирователя коротких импульсов,
- усилителя коротких импульсов,
- преобразователя электрических импульсов в инфракрасные (ИК) импульсы,
- излучателя ИК–импульсов,
- рабочей зоны датчика дыма,
- приемника ИК–импульсов с преобразованием ИК-импульсов в электрические импульсы,
- компаратора,
- зарядно-разрядной RC - цепи,
- ключа для пропуска импульсов на коммутатор,
- коммутатор тока,
- выходного сигнального устройства (звукового, светового или передающего информацию по каналу связи).
Работает схема следующим образом. Выработанные генератором электрические импульсы формируются в короткие сигналы, которые после усиления преобразуются в ИК-импульсы. Эти импульсы принимаются приемником ИК-импульсов и преобразуются из ИК–импульсов в электрические импульсы.
Излучатель ИК-импульсов и приемник ИК-импульсов находятся в рабочей зоне (цилиндр, открытый с обеих торцов) датчика на некотором расстоянии друг от друга. Когда нет дыма, ИК-импульсы, выйдя из источника ИК–импульсов достигают приемник ИК–импульсов и сигнала тревоги нет.
При появлении дыма промежуток между источником ИК-импульсов и приемником ИК–импульсов становится не прозрачным для ИК-импульсов, в результате чего появляется сигнал тревоги.
После преобразования ИК–импульсов в электрические сигналы они поступают в компаратор, зарядно-разрядную цепь и на ключ, который пропускает электрические импульсы от генератора на коммутатор тока в случае появления дыма в датчике. Этот сигнал включает выходное сигнальное устройство тревоги (звуковое, световое или передатчик информации по линиям связи).
В случае отсутствия дыма ключ не пропускает импульсы на коммутатор, и сигнала тревоги нет.
При использовании нескольких датчиков одновременно установленных в разных местах схему можно дополнить индикатором номера сработавшего датчика дыма. Для этого нужно, чтобы частоты генераторов отличались друг от друга, а воспользовавшись цифровым индикатором частот, можно будет определять место возгорания. При этом отпадает необходимость вести охранные шлейфы отдельно от каждого датчика.
Воронежский государственный технический университет
УДК 681.3
Данилов Ю. М., Красноперов О.В., Скоробогатов В.С.
УСТРОЙСТВО ИЗМЕРЕНИЯ ЗВУКОВЫХ СИГНАЛОВ
Рассматривается принцип действия и структурная схема измерителя уровня стереофонических звуковых сигналов с индикацией значения измеряемого уровня с помощью линейных светодиодных шкал, диапазон измеряемых уровней от минус 40 дб до плюс 3 дб
В последние годы всё больше появляется звукозаписывающей и звуковоспроизводящей аппаратуры с широким спектром применения и различной выходной мощностью. Во избежание перегрузок трактов записи и звукопередачи и появления при этом искажений звуковых сигналов, особенно при больших выходных мощностях, необходим контроль уровня выходных сигналов с помощью квазипиковых измерителей. При значительных (сотни и более миллисекунд) длительностях измеряемого промежутка звукового сигнала происходит усреднение значений высоких и низких уровней, что приводит к значительным ошибкам измерений. Для уменьшения этих ошибок следует измеряемый промежуток брать как можно меньше, например, 10 миллисекунд. Такой измеритель с диапазоном измеряемых уровней от -40 дб до +3 дб рассмотрен ниже.
Измеритель уровня звуковых сигналов имеет в своем составе: входное устройство, усилители, двухполупериодный детектор, времязадающие цепочки и индикаторные устройства на линейных светодиодных шкалах. Структурная схема такого измерителя представлена на рис.1.
В качестве входного устройства применен операционный усилитель в дифференциальном включении. Входной электрический сигнал через разъем Х2 (блок 1 рис.1) подается на этот усилитель. Для измерения уровня стереофонического звукового сигнала используются два идентичных канала. Усилитель первого канала собран на микросхеме ДА1.1 типа LM324 (блок 2), второго канала – на микросхеме ДА1.2 типа LM324 (блок 3). Усиление этих каскадов выбирается обычно небольшим, т. к. последующее усиление происходит в 7-10 раз, что вполне достаточно для дальнейшей обработки сигнала.
Реальные звуковые сигналы обычно несимметричны, поэтому применено двухполупериодное детектирование на двухканальной микросхеме К157ДА1 с детекторами огибающей (блок 4), работающей в диапазоне до 50 дб. Эта микросхема характеризуется линейным преобразованием, малой потребляемой мощностью, большим коэффициентом усиления.
В связи с тем, что выходное сопротивление детектора на микросхеме К157ДА1 и входное сопротивление следующего каскада на микросхеме LM3915 сильно различаются, для согласования входного и выходного сопротивлений после детектора установлен повторитель (блоки 5 и 6), практически не оказывающий влияние на разрядку конденсатора времязадающей цепочки (С16 для 1-го канала в блоке 7 и С17 для 2-го канала в блоке 8). После повторителей сигнал подается на времязадающую цепочку (блоки 7 и 8),состоящую из конденсаторов С16 и стабилизатора тока на VT1 (для 1-ого канала) и С17 и стабилизатора тока на VT2 (для 2-ого канала).

Время измерения квазипикового значения уровня сигнала длится 10 мс, разряд конденсатора времязадающей цепочки происходит в течение 300 мс. Применение во времязадающей цепочке стабилизатора тока делает разряд конденсатора не по экспоненте, а по наклонной прямой, что увеличивает длительность видимого свечения светодиодной шкалы. Время этого свечения достаточно для его зрительной регистрации.
Для отображения уровней звуковых сигналов выбраны светодиодные линейые шкалы: HL1 DC-10GWH (блок12) и HL2 DC-7G3HWA (блок 13) для 1-го канала и HL3 DC-10GWH (блок 15) и HL4 DC-7G3HWA(блок 16) - для 2-го канала. Свечением этих светодиодных шкал управляют микросхемы ДА6 LM3915 (блок9) и ДА7 LM3916 (блок 10) – для 1-го канала, а ДА8 LM3915 (блок 11) и ДА9 LM3916 (блок 14) – для 2-го канала.
Управляющие микросхемы ДА6 и ДА8 и соответствующие им светодиодные шкалы HL1 и HL3 фиксируют уровни звуковых сигналов 1-ой половины измеряемого диапазона, а управляющие микросхемы ДА7 и ДА9 и соответствующие им светодиодные шкалы HL2 и HL4 фиксируют уровни 2-ой половины диапазона. Светодиодная шкала DC-10GWH состоит из 10 светодиодов зеленого цвета, а светодиодная шкала DC-7G3HWA имеет 3 верхних светодиода красного цвета. Светодиодные шкалы выбраны как наиболее удобные для восприятия глазом и не утомляющие зрение.
Светодиодные шкалы отмечают превышение нормированного значения уровня звукового сигнала на +1,+2 или +3 дб. Так, например, первый светодиод шкалы HL1 загорается при превышении уровня -40 дб, второй – при превышении уровня -37 дб, третий светодиод - -34 дб, четвертый - -31дб, пятый - -28 дб, шестой - -25 дб, седьмой - -22 дб, восьмой - -19 дб, девятый - -16 дб, десятый - -13 дб, т. е. через каждые 3 дб. Далее, при дальнейшем превышении уровня сигнала вступает в работу светодиодная шкала HL2. На ней при превышении уровня -10 дб загорается светодиод HL2.2 (см. схему на рис.1), при превышении уровня -7 дб- загорается светодиод HL2.3, при превышении уровня -5 дб – загорается HL2.4, при -3 дб – HL2.5, при -1 дб – HL2.6, при 0 дб – HL2.7, при +1 дб – HL2.8, при +2 дб - HL2.9 и при +3 дб – светодиод HL2.10 . Такую градацию уровней обеспечивают соответствующие управляющие микросхемы ДА6 и ДА7. Аналогичным образом происходит обработка сигнала, разделение по уровням и свечение светодиодов для второго канала измерителя.
Яркость свечения светодиодов зависит от величины протекающего через них тока. Самый левый светодиод линейной шкалы использован как индикатор включения измерителя.
Электропитание измерителя уровня звуковых сигналов осуществляется через разъем Х1 (блок 17) от аккумуляторов или других источников постоянного тока напряжением +12 в, а также от сети переменного тока 220 в, 50 гц через дополнительный блок питания на 12 в постоянного тока. Для обеспечения стабилизированным напряжением всех цепей схемы используются два стабилизатора. Один стабилизатор на микросхеме ДА2 КР142ЕН5В (блок 18) служит для питания всех светодиодных шкал, второй стабилизатор на микросхеме ДА3 КР142ЕН5Е (блок19) используется для питания импульсного инвертора на ДА4 СРА7660 (блок 20) и остальных частей схемы. Использование двух стабилизаторов позволяет исключить влияние более мощных цепей светодиодных шкал на остальные каскады схемы. Импульсный инвертор преобразует постоянное напряжение в двуполярное, которое необходимо для питания микросхемы ДА5 К157ДА1.
Воронежский государственный технический университет
УДК 681.3
В. В. Кастерин, Ю. М. Данилов, В.С. Скоробогатов
О ПЕРЕДАЧЕ
СВЕДЕНИЙ ПО ОХРАНЕ И КОНТРОЛЮ СОСТОЯНИЯ
ЭКОЛОГИЧЕСКИ ОПАСНЫХ ОБЪЕКТОВ
Рассматриваются системы сбора, обработки, хранения и передачи информации с удаленных стационарных объектов
В связи с развитием различных отраслей промышленности все в больших масштабах появляются, в том числе и в отдаленных районах, экологически опасные объекты. Сбор, обработка, хранение и передача по радиоканалу информации с этих объектов является важной задачей. Для этих целей используются различные радиоэлектронные средства как импортного, так и отечественного производства. Следует отметить, что системы сбора, обработки, хранения и передачи информации с удаленных стационарных объектов используются в последние годы все чаще и области их применения расширяются. Основные из них следующие:
структуры МЧС (контроль безопасности потенциально опасных объектов города, школ…)
системы пожарной сигнализации (передача сигналов о пожаре на ЕСС – 01)
системы охраны предприятий
системы охраны банковских и коммерческих структур
районные и городские отделы вневедомственной охраны
частные охранные предприятия
системы охраны дачных поселков
системы городского хозяйства и т. д.
За период с 1995 года по настоящее время в России внедрены сотни радиосистем передачи информации, подавляющее большинство из них – импортных. Однако следует учесть, что использование отечественных средств имеются следующие достоинства:
отсутствие таможенных процедур.
более оперативная поставка.
возможность работы без предоплаты.
наличие на складах изготовителя и оперативная поставка подменного фонда.
оперативное гарантийное обслуживание.
более низкая и гибкая система скидок.
совместимость с отечественными объектовыми приборами при работе в в полных протоколах ( по RS-232, ТТЛ и т. д.).
полная русификация.
одаптированность к климатическим условиям.
возможность доработки с учетом требование заказчика и иной специфик.
В связи с указанным необходимо активизировать внедрение отечественного оборудования на функционирующих импортных и вновь вводимых радиосистемах передачи информации.
Автономные системы сигнализации, снабженные только сиренами, стробвспышками и т. п. Не обеспечивают необходимого реагирования. Задачу обеспечения доставки информации до сил реагирования обеспечивают системы централизованного наблюдения.
Современные системы радио-охраны имеют значительные преимущества по сравнению с ранее используемыми телефонными. Поэтому МЧС рекомендует обратить внимание на создание системы контроля безопасности производства на всех потенциально опасных объектах регионов.
После анализа существующих систем автоматического мониторинга и научно-производственного потенциала специалистами ГОЧС были определенны приоритетные направления для решения поставленных задач, собрана информация о технических характеристиках существующих систем, о поставщиках и ценах на оборудование.
Принято решение при развертывании системы максимально использовать возможности.
Определен круг основных событий, информацию о которых целесообразно в автоматическом режиме круглосуточно отображать на пультах централизованного наблюдения: утечка аварийных химически опасных веществ, срабатывание пожарной сигнализации, несанкционированное проникновение на объект, состояние системы энергоснабжения объекта и т. д.
Объекты, подлежащие подключению к системе радио - мониторинга, определяются следующими категориями: крупные потенциально опасные (химически опасные) предприятия; муниципальные объекты социального назначения (учреждения образования, здравоохранения и т. д.); другие потенциально опасные (пожароопасные) объекты.
Управления государственного пожарного надзора обязаны подготовить перечень предприятий и зданий на своей территории, подлежащих оборудованию пожарной автоматикой с передачей сигнала о пожаре по радиотелекоммуникационной системе на пункты связи единой службы спасения «01», а также объектов массового скопления людей, автотранспортных предприятий, АЗС, сельскохозяйственных предприятий.
Реализация указанных мероприятий позволит качественно повысить уровень работы по раннему оповещению о пожарах и чрезвычайных ситуациях, существенно уменьшит риск наступления общественно опасных последствий катастроф природного и техногенного характера, поможет решать и вопросы безопасности на жизненно важных для региона объектах. Позволит прогнозировать и контролировать ситуацию с аварийностью в целом.
Воронежский государственный технический университет
УДК681.3
А.В.Башкиров, И.В.Остроумов, И.В.Свиридова
МЕТОДЫ РАЦИОНАЛЬНОГО КОДИРОВАНИЯ
В статье рассматривается сущность и методы рационального кодирования,а также особенности параметрической адаптивной процедуры
Методы рационального кодирования осуществляют сокращение избыточности сообщений в условиях априорной неопределенности относительно статистических характеристик сигналов, т.е. в условиях, когда неизвестны статистические характеристики этого сигнала. Под рациональным кодированием понимают такое кодирование, при котором измерительная информация представленная в дискретной форме требует минимальное количество символов при заданной верности. Требование рационального кодирования сообщений обусловлены тем, обстоятельством, что в случае нерационального кодирования на первом этапе избыточность сохраняется и на последнем. В случае применения корректирующих (помехоустойчивых) кодов избыточность сообщений еще более возрастает. Процедуры рационального кодирования источника сообщений классифицируются по их возможности менять параметры или структуру кодирующего устройства для обеспечения сжатия данных. Классификация имеет вид (рисунок 1).

Рис. 1
Фиксированная
процедура имеет заданную структуру,
которая остается неизменной при любых
входных воздействиях. Это не позволяет
оптимизировать процесс обработки данных
при разных сообщениях на входах
квантователя (можно оптимизировать для
класса разных сообщений), но допускает
простую аппаратную реализацию алгоритма.
Пример фиксированной процедуры -
 -квантователь.
-квантователь.
Параметрическая адаптивная процедура чувствительна к статистике сообщений и изменяется в соответствии с выбранным критерием свои параметры.
Непараметрическая адаптивная процедура сжатия данных с изменением структуры алгоритмов сообщений является наиболее перспективной с точки зрения эффективности кодирования источника нестационарных сообщений с изменяющимися статистическими характеристиками. В этом случае меняются не только параметры, но и структура алгоритма кодирования. К таким процедурам относят алгоритм адаптивно - разностной ИКМ с перестройкой структуры фильтра – предсказателя.
Предположим,
что в результате дискретизации сигнала
получается последовательность непрерывных
величин
 для передачи по цифровым каналам связи.
Каждый отсчет необходимо проквантовать
до конечного множества значений.
Целесообразно разделять процесс
представления последовательности
множеством двоичных символов на два
этапа: квантование, результатом которого
является последовательность величин
=
для передачи по цифровым каналам связи.
Каждый отсчет необходимо проквантовать
до конечного множества значений.
Целесообразно разделять процесс
представления последовательности
множеством двоичных символов на два
этапа: квантование, результатом которого
является последовательность величин
= и кодирование, когда последовательности
величин
ставится в соответствие кодовое слово
и кодирование, когда последовательности
величин
ставится в соответствие кодовое слово
 ,
т.е. этот процесс можно представить в
виде (рисунок 2).
,
т.е. этот процесс можно представить в
виде (рисунок 2).

Рис. 2
Обычно
для кодирования квантованных отсчетов
используют двоичную последовательность.
С помощью B-разрядного
кодового слова можно представить
 уровней квантования. Скорость передачи
информации в этом случае:
уровней квантования. Скорость передачи
информации в этом случае:
 ,
(1)
,
(1)
где
 - частота дискретизации, которая
выбирается исходя из способа восстановления
сигнала в приемнике,
- частота дискретизации, которая
выбирается исходя из способа восстановления
сигнала в приемнике,
 -
число бит на отсчет сигнала.
-
число бит на отсчет сигнала.
Если - const, то единственный путь уменьшения скорости передачи состоит в сокращении числа двоичных единиц на отсчет сигнала.
Обычно отношение сигнал – шум задается в дБ:
 .
(2)
.
(2)
Из выражения (2) следует, что добавление одного разряда кодового слова улучшает отношение сигнал – шум квантования на 6 дБ. Выражение для отношения сигнал – шум квантования получено при предположении, что диапазон квантования используется полностью, если энергия сигнала изменится, то отношение сигнал – шум квантования уменьшится. В реальных условиях дисперсия телеметрического сигнала можно меняться на 20-30дБ. По этой причине для поддержания отношения сигнал – шум квантования на заданном уровне в случае равномерного квантования необходимо увеличивать число уровней квантования, при этом увеличивается избыточность сообщения. Желательно иметь устройство квантования, при котором отношение сигнал – шум квантования не зависит от уровня сигнала. Это достигается использованием неравномерного распределения уровней квантования.
Имеется два класса схем адаптивного квантования:
Квантователь с адаптацией по входу, когда дисперсия входного сигнала оценивается непосредственно по этому сигналу.
Квантователь с адаптацией по выходу, когда шаг квантования подстраивают по выходному сигналу
 или
кодовому слову
или
кодовому слову
 .
.
Рассмотрим структурную схему квантователя с переменным шагом квантования (рисунок 3).
Шаг квантования должен быть известен на приемной стороне, т.е. в этом случае отсчет описывается кодовым словом и шагом квантования. Если используется квантователь с адаптацией по входу на основе усилителя с переменным коэффициентом усиления, то квантованный сигнал описывается кодовым словом и коэффициентом усиления.

Рис. 3
Экспериментальные исследования в случае, если сигнал имеет функцию плотности вероятностей (ФПВ) Гаусса или Лапласа показали, что адаптивное квантование дает выигрыш в отношении сигнал-шум квантователя не менее 5 - 6 дБ по сравнению с - квантователем. Если дисперсия входного сигнала изменяется в широких пределах (30 дБ и более), этот выигрыш будет увеличиваться.
Схема адаптации по выходу с переменным шагом квантования имеет вид (рисунок 4).
Рис. 4
Недостатком подобных квантователей является высокая чувствительность к ошибкам в кодовых словах, т.к. эти ошибки приводят не только к неправильной установке уровней квантования, но и ошибкам в шаге квантования.
Методы адаптивного квантования дают выигрыш в отношении сигнал-шум квантователя по сравнению с квантованием по - закону при том же динамическом диапазоне сигнала. Этот выигрыш зависит от формы ФПВ входного сигнала и его динамического диапазона. В связи с этим представляет интерес рассмотрение методов разностного кодирования, которые менее чувствительны к форме ФПВ входного сигнала.
Список литературы
Радиотехнические методы передачи информации: Учебное пособие для вузов / В.А.Борисов, В.В.Калмыков, Я.М.Ковальчук и др.; Под ред. В.В.Калмыкова. М.: Радио и связь. 1990. 304с.
Кириллов С.Н., Бодров О.А., Макаров Д.А. Стандарты и сигналы средств подвижной радиосвязи. Учебное пособие. Рязань. РГРТА, 1999. 80с.
Кириллов С.Н., Малинин Д.Ю. Теоретические основы асинхронного маскирования речевых сигналов. Учебное пособие. Рязань. РГРТА, 2000. 80с.
Кириллов С.Н., Зорин С.В. Вейвлет – анализ случайных процессов в радиотехнических устройствах. Учебное пособие. Рязань. РГРТА, 2002. 80с.
Воронежский государственный технический университет
УДК681.3
А.В.Башкиров, И.В.Остроумов, И.В.Свиридова
ОСНОВЫ СИСТЕМЫ ПЕРЕДАЧИ ДАННЫХ ПО РАДИОКАНАЛУ
В статье рассматриваются основы системы передачи данных по радиоканалу
Основная идея проекта состоит в том, чтобы передать данные от одного пункта до другого. Эта передача может быть как беспроводная по радиоканалу, так и по проводам.
В данном проекте передаются 4 типа данных от различных типов датчиков по радиоканалу.
В качестве датчиков используется температурный датчик, датчик уровня топлива,датчик давления и датчик числа оборотов за 1 минуту. Все эти датчики имеют аналоговый выход в форме напряжения, которое преобразуется в цифровые данные, которые мы можем передать.
Почему необходимо преобразовывать аналоговые сигналы в цифровые?

Предположим, что мы преобразовали аналоговые сигналы в цифровые данные. Что дальше? Поскольку четыре различных типа данных мы должны передать по одному каналу, то нам надо их объединить. Аналоговые сигналы объединить невозможно, для цифровых сигналов мы можем использовать цифровой коммутатор, который будет объединять данные в один поток следующими один за другим.
Примечание: скорость передачи данных от 12 до 15 циклов в 1 минуту.
Передача данных:

Блок-схема показывает пример передачи данных с использованием какой либо модуляции сигнала.

После получения данных от приемника и их демодуляции мы получим реальные данные, которые передавались передатчиком и мы легко их показывать.
Функциональная блок-диаграмма:

Схема цифровой части:
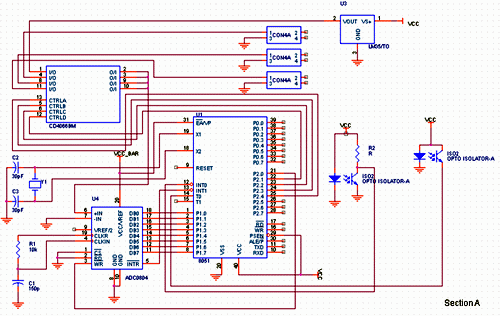
Рис.1. (секция А)
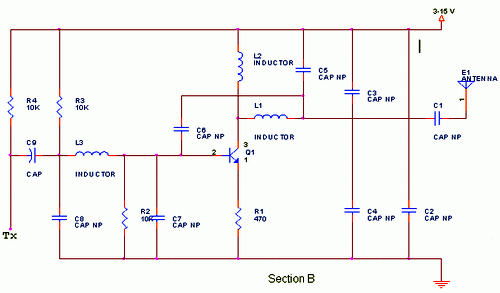
Рис.2. (Секция В - радиочастотный передатчик)
Описание схемы:
В секции "А" изображен цифровой приемник сигналов от 4-х датчиков. Здесь используется аналоговый переключатель IC M4066, который также хорошо работает как и цифровой.
Он имеет четыре устройства ввода/вывода и отдельные выводы для контроля передачи аналоговых сигналов через коммутатор. Линии управления коммутатором соединяются с выводами микроконтроллера (порты 2.1 - 2.4).
Поскольку эти все сигналы аналоговые, так что мы должны преобразовать их в цифровые форму посредством аналого-цифрового преобразователя. Для этой цели мы использовали IC ADC0804.
Это 8-разрядный АЦП и на его выходе мы имеем цифровой эквивалент аналогового сигнала с диапазоном значений от 0 до 255. Из АЦП 8-разрядные данные поступают в микропроцессор (порты 1.0 - 1.7). Посредством мультиплексирования 4 аналоговых сигналов последовательно переводятся в цифровую форму и в виде одного потока данных передаются в модулятор передатчика.
Чтобы передать некоторый сигнал на расстояние мы должны промодулировать его в передатчике. Хорошо, когда схема модулятора совмещена с передатчиком. В данной схеме используется частотная модуляция из-за ее простоты и получения большой дальности передачи сигнала, которая может составить около 2 км. Так например вещательный диапазон FM достаточно широк для возможной передачи данных. Этот передатчик передает сигнал на частоте 98 МГц. Но сигнал передатчика не будет точно соответствовать модулирующему цифровому сигналу (форма меандра). Здесь мы говорим, что сигнал лишь похож по форме на меандр. Точный вид формы сигнала передатчика можно увидеть на осциллографе.


Рис.3 (комментарий к цифровой схеме)
Радиочастотный передатчик в данном проекте собран по простейшей схеме (рис.2). Он представляет собой LC возбудитель на одном транзисторе совмещенный с цепями ЧМ модулятора. Выходная мощность передатчика около 0,8 Вт. Частота автогенератора 98 МГц. Приемник - обычный радиовещательный с подходящим УКВ диапазоном. Дальность уверенного приема и демодуляции цифровых данных не более 2-х километров. И при использовании данной аппаратуры не может быть улучшена.
Воронежский государственный технический университет
УДК 621.38
И.А. Лозовой, А.В. Турецкий
ЭТАПЫ АНАЛИЗА РАДИОЭЛЕКТРОННЫХ МОДУЛЕЙ
НА МЕХАНИЧЕСКУЮ ПРОЧНОСТЬ
В статье рассмотрена методика комплексного анализа механических характеристик радиоэлектронных модулей, которая учитывает механическую прочность паяных соединений. Предельные значения выдерживаемых вибраций, ударов и статических нагрузок получаются на основе натурных испытаний электронных компонентов с различными корпусами, смонтриванными на тестовой плате с применением разных припоев и режимов пайки.
Радиоэлектронные модули (РМ) является одними из основных элементов радиоэлектронных средств. На них размещается большое количество сложных электронных компонентов, чувствительных к механическим воздействиям (ударам, вибрациям, статическим нагрузкам и пр.). Провести механический анализ конструкции РМ средствами современных САПР не представляется сложным. Трудности вызывает анализ результатов моделирования. Например, на рисунке 1 представлены результаты моделирования в системе Pro/Engineer модального анализа РМ. Наглядно видно, что в наиболее нагруженную зону попали некоторые компоненты. При этом не ясно приведет ли такая ситуация к нарушению их работоспособности или нет. Зачастую работоспособность компонента определяется не механической прочностью корпуса, а прочностью пайки, как наиболее ответственного узла.
К сожалению, система Pro/Engineer не позволяет моделировать механические характеристики паяных соединений компонентов, которые в первую очередь определяют надежность радиоэлектронного модуля. Даже незначительные микротрещины в нем могут привести к изменению переходного сопротивления и потере работоспособности модуля. Дело осложняется еще тем, что существует большое количество разнообразных корпусов, припоев, режимов пайки электронных компонентов. В этом случае без натурных испытаний не обойтись.
В данной работе предлагается структурная схема методики комплексного анализа механических характеристик РМ (рисунок 2), учитывающей предельные значения вибраций, ударов, статических нагрузок различных электронных компонентов, определяемых тестированием на автоматизированной установке.
Первый блок представляет собой постановку задачи, в которую входит выбор комплекса механических воздействий и их параметров, которые будут присутствовать в определенных режимах эксплуатации изделия. Эти данные должны быть известны еще до начала конструирования, в соответствии с техническим заданием.

Рис. 1. Результаты расчета на механическую прочность
радиоэлектронного модуля (модальный анализ)
Сбор необходимой информации (блок №3) включает в себя данные о самом радиоэлектронном модуле, его размеры, элементная база, материалы и их характеристики, а так же определение наиболее уязвимых мест с точки зрения конструкторской документации. Необходимо иметь данные о вибрационных и ударных характеристиках радиокомпонентов и других приборов. При этом формируется и постоянно обновляется база данных (блок №2), включающая в себя механические и тепловые свойства материалов конструкций РМ, физико-химические свойства материалов, участвующих в производственно-технологическом процессе, графическое представление, связывающее количество циклов нагрузки до разрушения с приложенным напряжением пластической деформации, как при пластическом, так и при упругом поведении материала (график Коффина-Мэнсона).
Блок №9 представляет собой выбор предварительного анализа характеристик РМ, аналитический или предварительный анализ инструментами метода конечных элементов (МКЭ). Выбор сводится к возможности применить математические модели, описывающие “классические” способы крепления типа жесткого защемления, свободного опирания или незакрепленного края пластины или конца балки. В случае невозможности применения таких моделей предварительный анализ, как и подробный, сводится к использованию программных инструментов, основанных на методах конечных элементов.
Аналитическое решение (блок №10) поставленной задачи сводится к определению собственных частот колебаний (СЧК) радиоэлектронного модуля, максимальные отклонения от положения равновесия, влияние удара.
После проведения аналитического расчета механических характеристик конструктор должен решить достаточно ли полученных данных для последующих действий.
В случае, когда данных недостаточно или когда особенности конструкции изделия не позволяют применить аналитические методы анализа, применяются современные инструменты инженерного анализа на основе МКЭ (блок №6). Для примера применена система Pro/Engineer, позволяющая проводить практически все типы моделирования механических нагрузок (вибрационный, статический, ударный и пр.). Типы проводимого моделирования формируются на основании блока №28. Полученные результаты представляются в виде диаграмм и графиков и подлежат анализу в блоке №8.

Рис. 2. Структурная схема методики комплексного анализа механических характеристик радиоэлектронных модулей
По методике, регламентируемой стандартом IEC-PAS 62137-3 [1] предполагается проводить автоматизированный анализ прочности компонентов радиоэлектронных модулей на статический прогиб, удар и вибрацию [2,3] (блок №5). Результаты, полученные при испытаниях, статистически обрабатываются (блок №7) и поступают в соответствующую базу данных (блок №11). При этом на предприятии будет существовать и регулярно пополняться база данных, содержащая предельные значения вибраций, ударов и статических напряжений различных компонентов (дискретные элементы, микросхемы в разных корпусах и пр.), с применением различных припоев и режимов пайки.
Эти данные поступают в блок №12 и на основании их анализируются результаты моделирования с применением МКЭ. Если в нагруженной зоне полученные значения напряжений, перемещений и пр. лежат за пределами прочности компонентов, то принимается решение об оптимизации конструкции (блок №24). В ходе оптимизации может быть принято решение об изменении конструкции (блок №26), применению других материалов (блок №27) или применению иной технологии при производстве радиоэлектронного модуля (блок №25). Затем следует тот же цикл моделирования методами МКЭ с проверкой результатов.
Если же на этапе проверки соответствия результатов моделирования требуемым значениям (блок №15) не выявляется критических отклонений, дается допуск на получение опытного образца изделия (блок №16) с обязательными натурными испытаниями на лабораторных установках (блок № 17) с утвержденными программами испытаний в соответствии условиями эксплуатации модуля (блок №18).
Если на этапе проверки прохождения лабораторных испытаний в конструкции обнаружатся несоответствия характеристик требованиям заказчика, принимается решение об оптимизации модуля. Если отклонения незначительны и могут быть устранены минимальной доводкой опытного образца, то проводится оптимизация (блок №20) и затем повторно испытания. Если же требуется более глубокая оптимизация, то повторяется цикл блоков 24-27 с созданием модернизированного опытного образца.
В случае положительного решения о результатах лабораторных испытаний проводится цикл испытаний в условиях эксплуатации (блок №21) и сдача изделия (блок № 22).
Предложенная методика может значительно ускорить процесс доработки разрабатываемых изделий во первых, благодаря системному применению САПР, использующих МКЭ для моделирования механических воздействий, а во вторых, наличию постоянно пополняемой базы данных по механическим характеристикам электронных компонентов. Так как во многих российских проектных организациях существует большая номенклатура разрабатываемых изделий (иногда более 100) с применением различных электронных компонентов (зачастую очень похожих) внедрение такой методики позволит всем отделам предприятия пользоваться этой базой без проведения дополнительных натурных испытаний.
Литература
Future IEC/PAS 62137-3 © IEC:200x-7-91/784/PAS.
И.А. Лозовой, А.В. Турецкий Подсистема испытания паяных соединений электронных компонентов на механические воздействия // Радиотехника 2012. №8 С. 80-84
И.А. Лозовой, А.В. Турецкий, В.А. Шуваев Методы испытания паяных соединений поверхностно монтируемых компонентов на механические воздействия // Радиотехника 2012. №8 С. 76-80
Воронежский государственный технический университет
УДК 621.38
И.А. Лозовой, А.В. Турецкий
МЕТОДИКА ОБРАБОТКИ РЕЗУЛЬТАТОВ ИСПЫТАНИЙ
ПАЯНЫХ СОЕДИНЕНИЙ КОМПОНЕНТОВ
РАДИОЭЛЕКТРОННЫХ МОДУЛЕЙ
В статье рассмотрены основные соотношения, позволяющие обрабатывать информацию по ускоренным испытаниям на надежность паяных соединений. Эти соотношения позволяют получить данные, необходимые для прогнозирования надежности пайки компонентов радиоэлектронных модулей
Для тестирования надежности паяных соединений в компонентах радиоэлектронных модулей часто применяют натурные испытания, в которых для ускорения процесса применяют термоциклирование – выдержку при больших перепадах температуры. В стандарте IEC/PAS 62137-3 подробно описан процесс формирования воздействий на электронный компонент и рекомендованы параметры термоциклирования. Испытание ведется до потери электрического контакта, в каком либо паяном соединении. После проведения тестирования результаты подлежат обработке.
Стандарт IPC-SM-785 регламентирует методику ускоренных испытаний на надежность паяных соединений [2]. Приведем некоторые данные по статистической обработке результатов испытаний из этого стандарта.
Прогнозирование усталостной долговечности Nf(x%) паяных соединений поверхностного монтажа, а следовательно, и надежности соединений, возможно как для изотермических механических, так и для тепловых циклических испытаний [2]. Эти прогнозы относятся к типичным условиям эксплуатации и ускоренным испытаниям.
Для жестких безвыводных паяных соединений, у которых напряжения превосходят порог текучести припоя, прогностическое уравнение для теплового циклического нагружения имеет вид [2]:
 .
(1)
.
(1)
Следует отметить, что в уравнении 1, а также в уравнении 2, параметры, стоящие слева от вторых скобок, отражают физические причины отказа и определяют среднюю циклическую долговечность; члены уравнения, находящиеся в вторых скобках, отражают статистическое распределение отказов, которое представлено в виде распределения Вейбулла.
Для паяных соединений с гибкими выводами, у которых напряжения в паяных соединениях лежат ниже предела текучести и, следовательно, не ограничиваются им, прогностическое уравнение имеет вид [2]:
 ,
(2)
,
(2)
где коэффициент масштабирования для метрических единиц измерения равен 1,38 МПа, где для оловянно-свинцовых припоев с составом, близким к эвтектическому (63/37 и 60/40);
А- эффективная минимальная площадь паяного соединения, воспринимающая нагрузку (равная 2/3 площади проекции смачиваемой припоем области вывода на контактную площадку);
с- показатель усталостной пластичности, определенный из уравнения
 ;
(3)
;
(3)
F- эмпирический коэффициент «неидеальности», указывающий на отклонения реальных паяных соединений от идеализирующих допущений, учитывающий вторичное и, чаще всего, неопределенное влияние циклических искажений формы и переходных состояний, неидеальность геометрии паяного соединения, наличие хрупких интерметаллических соединений и обогащенных межфазных слоев, различие коэффициентов теплового расширения припоя и присоединяемого материала, а также неточности и неопределенности параметров уравнений 1 и 2; 1,5>F>1,0 для цилиндрических безвыводных соединений; l,2>F>0,7 для безвыводных соединений с галтелями (корончатые кристаллодержатели и чип-компоненты); F = 1 для паяных соединений с использованием гибких выводов;
h- высота паяного соединения, для соединений с выводами h = 1/2 толщины трафарета для паяльной пасты, что является характерным для усредненной толщины припоя;
КD- «диагональная» изгибная жесткость свободного неспаянного вывода компонента, определяемая методом конечных элементов;
2LD - максимальное расстояние между паяными соединениями компонента, измеренное между центрами контактных площадок;
N- (циклическая частота интервалов расчетной долговечности), количество рабочих циклов в течение срока службы изделия;
Nf(x%) - количество рабочих циклов при вероятности отказа х %;
Тс ,Ts -установившаяся рабочая температура компонента и подложки (Тс >TS для диссипации энергии в компоненте) во время выдержки при высокой температуре;
TC,0,TS,0 - установившаяся рабочая температура для компонента и подложки во время выдержки при низкой температуре, для нерабочих полупериодов (питание отключено);
ТSJ= (1/4)(Тс + Ts + ТС,0 + TS,0), средняя температура паяного соединения в цикле;
tD - время выдержки в полупериоде, выраженное в минутах - среднее время для релаксации напряжений при температурах Тс , ТS и ТC,0 ТS,0;
х- допустимая совокупная вероятность отказа для исследуемого компонента после N циклов, %;
αC, αS, -коэффициент теплового расширения (КТР) для компонента и подложки;
β- параметр формы распределения Вейбулла, наклон графика распределения; если оно неизвестно, рекомендуется использовать 4 для безвыводных соединений и 2 для соединений с гибкими выводами;
D- потенциальное повреждение при циклическом нагружении после полной релаксации напряжений;
Тс=Тс - ТС,0, амплитуда циклических колебаний температуры компонента;
Тe= (αS ТS – αC ТC)/α, эквивалентная амплитуда циклических колебаний температуры, вызывающая диссипацию энергии в компоненте, а также колебания внешней температуры компонента (α ≠0);
ТS = ТS - ТS,0 -амплитуда циклических колебании температуры подложки (в области компонента);
α=αC-αS абсолютная разность коэффициентов теплового расширения компонента и подложки, несовпадение КТР,
f - коэффициент усталостной пластичности, 2f =0,65 для оловянно-свинцовых припоев с составом, близким к эвтектическому (63/37 и 60/40).
В уравнениях 1 и 2 содержатся все параметры первого порядка, влияющие на усталость паяного соединения при сдвиге и полученные на основании фундаментальных представлений о восприимчивости паяных соединений поверхностного монтажа к циклическому накоплению усталостных повреждений, вызванных деформациями сдвига из-за несовпадения теплового расширения компонента и подложки. Эти сдвиговые деформации, обусловленные общим несоответствием теплового расширения, являются причиной независящей от времени остаточной пластической деформации, а также деформаций, обусловленных ползучестью/релаксацией напряжений, зависящих от времени, температуры и напряжения [2].
Для приведения результатов ускоренных испытаний в соответствие условиям эксплуатации, или даже просто для сравнения результатов ускоренных испытаний, проводившихся в различных условиях, должны быть известны коэффициенты ускорения испытаний. Для типичных ускоренных испытаний коэффициенты ускорения для приведения результатов к условиям эксплуатации рассчитываются либо по количеству циклов[2]:
 ;
(4)
;
(4)
либо по среднему времени наработки на отказ (MTTF)
 ,
(5)
,
(5)
где f(use) и f(test) представляют собой циклическую частоту при эксплуатации и испытаниях, соответственно.
Для заданной совокупности характеристик припоя, зависящих от времени, температуры и напряжения, простые коэффициенты ускорения неприменимы, и необходимо задать закономерность преобразования ускорения. Данное преобразование ускорения позволяет осуществить экстраполяцию результатов ускоренных испытаний для прогнозирования надежности изделия в ходе эксплуатации. Оно позволяет также выполнить обоснованное сравнение результатов ускоренных испытаний, проводившихся в различных условиях, поскольку преимущественный механизм повреждения (усталость в результате ползучести) для них одинаков.
Преобразование ускорения получается из уравнений 1-3, если применить их для двух режимов термоциклирования, обозначаемых (1) и (2), и поделить уравнения друг на друга. Эти режимы, (1) и (2), могут быть как условиями испытаний, так и условиями эксплуатации, и из преобразования ускорения получается количество циклов для режима (2), Nf(2), которое эквивалентно количеству циклов в режиме (1), Nf(l), при одинаковой вероятности отказа [2]:

 ;
(6)
;
(6)
где для безвыводных соединений поверхностного монтажа
 ,
(7)
,
(7)
и для поверхностного монтажа компонентов с выводами
 ,
(8)
,
(8)
где D - потенциальное усталостное повреждение при циклическом нагружении после полной релаксации напряжений. Поскольку в преобразовании ускорения значения повреждения представлены в виде отношения, параметры, одинаковые для двух сравниваемых режимов, можно сократить.
Полученные данные позволяют определить предельные характеристика паяных соединений компонентов при ускоренных испытаниях на надежность и тем самым прогнозировать выход компонента из строя при заданных режимах эксплуатации.
Литература
Future IEC/PAS 62137-3 © IEC:200x-7-91/784/PAS.
IPC-SM-785. Guidelines for Accelerated Reliability Testing of Surface Mount Solder Attachments.
Воронежский государственный технический университет
УДК 621.38
И.А. Лозовой, А.В. Турецкий
СТРУКТУРА ИСПЫТАТЕЛЬНОГО СТЕНДА ИСПЫТАНИЯ
ПАЯНЫХ СОЕДИНЕНИЙ КОМПОНЕНТОВ
РАДИОЭЛЕКТРОННЫХ МОДУЛЕЙ НА МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ
В статье рассмотрена структура автоматизированной системы, тестирования надежности паяных соединений компонентов в радиоэлектронных модулях, регламентируемая стандартом IEC-PAS 62137-3. Эта система позволяет получить данные, необходимые для анализа результатов моделирования механических характеристик радиоэлектронных модулей
В настоящее время разработчики сложной электронной аппаратуры все большее предпочтение отдают САПР высокого уровня, которые охватывают большинство этапов создания изделия, начиная от начальных до окончательных, включая тестирование опытного образца. При этом такие САПР обеспечивают высокую «ассоциативность» проектов, что позволяет значительно снизить временные затраты на разработку аппаратуры, в то время как использование вместо них набора отдельных ускоспециализированных САПР более низкого уровня при неизбежных доработках аппаратуры фактически означает повторения цикла проектирования с многочисленными конвертациями данных из одного программного продукта в другой.
Среди таких систем можно выделить систему Pro/ENGINEER (ныне Creo Parametric) [1]. Она относится к «механической» САПР, охватывающей все стадии проектирования и подготовки производства, включающая процесс 3D моделирования, инженерного анализа и разработку технологии.
Для решения задачи инженерного механического анализа конструкций РЭС может быть использован модуль Pro/ENGINEER Mechanica. Он позволяет осуществлять исследование термомеханических характеристик проектируемых изделий и их оптимизацию по заданным параметрам.
Однако в модуле Pro/ENGINEER Mechanica отсутствует возможность моделирования процессов нарушения контактов плата-компонент радиоэлектронного модуля, в то время как нарушение целостности паяного соединения является основной причиной его отказа при механических воздействиях. В тоже время после проведения тестирования модуля целесообразно проверить электрорадиоэлементы, находящиеся в наиболее нагруженных областях и выяснить к чему может это привести. Для определения условий нарушения целостности паяных соединений требуется провести для каждого типа компонента масштабные испытания, которые дадут в качестве результатов максимальную допустимую глубину прогиба платы, количество термоциклов и т.д. при которых произойдет нарушение контакта.
Методика тестирования регламентируется международным стандартом IEC/PAS 62137-3 [2]. В нем подробно описаны способы ускоренного испытания различных компонентов (как поверхностномонтируемых, так и с монтажом в отверстия) на удар, вибрацию, сдвиг и другие виды нагрузок. Для интенсификации разрушительных процессов, протекающих в паяном соединении применяется процесс термоциклирования- выдержка в термокамере при определенной температуре. Указаны также параметры термоциклирования и их количество. Однако в стандарте нет сведений о конструкции применяемых испытательных стендов, есть только рекомендации, касаемые выполнения тестовых плат и конструкции захватов для них.
Для реализации испытания электронных компонентов на прочность паяных соединений при действии вибраций может быть использована автоматизированная установка, структурная схема которой представлена на рисунке 1.
Условно установку можно разделить на три большие части: персональный компьютер со специализированным программным обеспечением (ПО), испытательный стенд, помещенный в камеру тепла и холода, снабженный датчиками и интерфейсные узлы.
Вибростенд 11 (рисунок 1) обеспечивает заданное механическое воздействие на тестовую плату с припаянным образцом 12. Параметры вибрационного воздействия контролируются вибродатчиком 6. Для контроля механических колебаний испытуемого компонента предусмотрены лазерные датчики 13, обеспечивающие фиксацию продольных и сдвиговых колебаний образца. Сигналы датчиков поступают в интерферометр 9 и с помощью контроллера 8 подаются в анализатор спектра 7. Вся информация поступает в персональный компьютер и фиксируется в программе.
Выводы тестируемого компонента должны быть соединены в последовательную цепь. В [3] представлены способы формирования такой цепи у различного типа корпусов интегральных микросхем.

Рис. 1. Структурная схема установки испытаний
на надежность паяных соединений при воздействии вибраций
Для контроля целостности паяных соединений служит соответствующий измеритель 10, который передает данные в управляющий компьютер. Как только сопротивление цепи значительно возрастает, даже в течение короткого промежутка времени, что эквивалентно отказу, тестирование прерывается.
Параметры механических воздействий задаются в ПО на персональном компьютере и через управляющий контроллер 3 и усилитель мощности 5 подаются на специализированные приводы стенда. При этом возможно изменять частоту и амплитуду.
Результаты испытаний статистически обрабатываются с помощью вычислителя 2- отдельного модуля ПО компьютера. На основании этих данных формируется база данных предельных параметров вибраций, которые выдерживает тестируемый компонент при заданных количествах термоциклов.
Несколько иная схема установки при испытании на действие ударов (рисунок 2). Удары производятся на обратную сторону тестовой платы специальным стальным шариком [4]. Эта же схема может применяться при тестировании на многократные ударные воздействия. В этой установке применяется специализированный привод, производящий последовательное бросание загруженных в лоток шариков. Для контроля этого процесса применяется датчик 6. С помощью датчика 13 анализируются амплитудные и частотные составляющие спектра удара, которые также передаются в ПК. Стандартом IEC/PAS 62137-3 [2] предусмотрено бросание шарика до тех пор,

Рис. 2. Структурная схема установки испытаний
на надежность паяных соединений при воздействии ударов
пока не нарушится целостность контактов, контролируемых измерителем сопротивления 10 (рисунок 2). Предварительно проводят термоциклирование.
Проведение указанных испытаний на предлагаемых автоматизированных установках позволяет определить предельные параметры, определяющие надежность паяных соединений различных электронных компонентов, что позволит выявить необходимость дальнейшей доработки радиоэлектронного модуля. С помощью данных установок возможно тестирование практически любых поверхностномонтируемых компонентов.
Литература
Минеев М.А. Pro/Engineer Wildfire 2.0/3.0/4.0. - М.: Наука и техника, 2008. - 352 с.
Future IEC/PAS 62137-3 © IEC:200x-7-91/784/PAS.
3. И.А. Лозовой, А.В. Турецкий Подсистема испытания паяных соединений электронных компонентов на механические воздействия // Радиотехника 2012. №8 С. 80-84
4. И.А. Лозовой, А.В. Турецкий, В.А. Шуваев Методы испытания паяных соединений поверхностно монтируемых компонентов на механические воздействия // Радиотехника 2012. №8 С. 76-80
Воронежский государственный технический университет
УДК 621.38
А.В. Турецкий
МОДЕЛИРОВАНИЕ И ОПТИМИЗАЦИЯ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СПЕЦИАЛИЗИРОВАННЫХ БЛОКОВ ПИТАНИЯ
Рассмотрена система автоматизированного проектирования, инженерного анализа и подготовки производства изделий любой сложности и назначения Pro/ENGINEER, интерфейс, возможности данной программы. Приведена классификация задач моделирования и оптимизации, осуществлена математическая постановка задач моделирования механических характеристик и конструкций РЭС. Приведены математические модели механических сил, действующих на РЭС. Разработана методика моделирования механических характеристик.
В связи с необходимостью проектирования сложных радиоэлектронных средств (РЭС) в минимальные сроки и с высоким качеством проектных работ целесообразно применять вычислительную технику, поэтому автоматизированные методы проектирования РЭС различного назначения широко внедряются в практику радиопромышленности.
Pro/ENGINEER является ядром интегрированного комплекса автоматизации предприятия, с помощью которого осуществляется поддержка жизненного цикла изделия в соответствии с концепцией CALS-технологий, включая двунаправленный обмен данными с другими Windows-приложениями и создание интерактивной документации. Полностью переработанный интерфейс : очень сильный упор сделан на эргономические качества, значительно повышающие эффективность работы конструктора.
Расширенные возможности модуля Pro/ENGINEER Mechanica (www.ptc-russia.com, www.pro-technologies.ru, www.solver.ru) /5-6,8-10/, позволяют решить многие задачи моделирования. Он обладает следующими возможностями:
- статический анализ для расчета напряжений и перемещений, включая контактные нелинейные задачи;
- модальные решения для незакрепленной и закрепленной модели;
- возможности расчета на устойчивость позволяют определить критическую для конструкции нагрузку;
- анализ стационарной теплопередачи для оценки воздействия на модель постоянной тепловой нагрузки и граничных условий.
Кроме того, конструкторы могут самостоятельно выполнять комплексный прочностной и тепловой анализ, где результаты теплового анализа используются в качестве нагрузки для cтатического анализа.
Модуль Pro/ENGINEER Mechanica работает со всеми типами геометрии: твердыми телами, оболочками, стержнями или смешанными моделями, а также содержит набор команд, позволяющих быстро готовить оптимальные (то есть быстро и точно рассчитываемые) расчетные схемы. Данный модуль воспринимает сборку из системы Pro/ENGINEER и автоматически соединяет компоненты во время решения. Такая возможность особенно важна при моделировании сложных сварных изделий из листового металла.
Pro/ENGINEER Mechanica обладает уникальной технологией, которая позволяет получить точные результаты при минимальных временных затратах со стороны конструктора. В традиционных системах прочностного анализа расчетчик интерактивно оптимизирует сетку конечных элементов (МКЭ) до тех пор, пока она точно не воспроизведет CAD-геометрию. Расчет требует большого опыта создания сеточных моделей. Приложение Pro/ENGINEER Mechanica снимает с конструктора задачу ручной подготовки сеточной модели, поскольку автоматически обеспечивает сходимость при проведении анализа.
Имеются следующие возможности конструкторских исследований и нахождения оптимального решения:
- взаимодействие с модулем Pro/ENGINEER Mechanism Dynamics Option для получения данных о нагрузках на элементы механизма;
- расчет локальной и глобальной чувствительности, который позволяет инженеру оценить воздействие отдельных изменений на состояние конструкции в целом;
- целевая комплексная оптимизация, которая обеспечивает наилучший профиль модели, т.е. совокупность таких характеристик проектирования, как размеры модели и значения параметров;
- взаимодействие с модулем Pro/ENGINEER Behavioral Modeling, где есть расширенные функции оптимизации, как, например, планирование эксперимента;
- настраиваемый интерфейс, позволяющий использовать внешние системы вспомогательных расчетов (например, расчета электромагнитных цепей).
Pro/ENGINEER Mechanica позволяет инженерам-конструкторам самостоятельно оценить, исследовать и оптимизировать структурное поведение разрабатываемых ими конструкций, находящихся под воздействием реальных статических и динамических нагрузок. Точное представление геометрии, уникальная адаптивная методика расчета, развитые возможности анализа вибрации и определения собственных частот и форм колебаний, включая выполнение временного и спектрального анализа исключают необходимость создания опытных образцов для проведения испытаний. Нагрузки и закрепления прикладываются непосредственно к геометрии модели и отображают воздействие внешней среды. Возможности проведения многозадачного анализа позволяют проводить одновременную оптимизацию по прочностным, тепловым и кинематическим характеристикам.
Среди задач механического анализа конструкций РЭС можно выделить следующие:
- статический анализ напряженного состояния конструкций с определением перемещений, напряжений, деформаций и усилий с выявлением наиболее нагруженного участка (пригоден для задач, в которых действие сил инерции или процессы рассеяния энергии не оказывают существенного влияния на поведение конструкции);
- модальный анализ с расчетом собственных частот конструкции в различных точках с выявлением опасных участков (результаты анализа дают возможность установить число форм колебаний и шаг интегрирования по времени, что может обеспечить надежное решение задачи о динамическом поведении системы в неустановившемся режиме);
- гармонический анализ конструкции на воздействие вибраций синусоидальной формы с получением перемещений и ускорений на заданном интервале частот, формы колебаний на резонансной частоте;
- анализ конструкций на случайные вибрации, получение векторов перемещений;
- анализ конструкций на действие ударов, выявление участков наиболее подверженных разрушению при ударе.
Для моделирования механических характеристик конкретных конструкций при внешних вибрационных воздействиях с помощью современных программных средств необходимо осуществить математическую постановку задач, т.е. сформировать комплекс моделей, включающих дифференциальные уравнения и граничные условия.
Гармоническая вибрация (изменяющаяся по гармоническому закону) сравнительно редко встречается в реальных условиях, но широко используется при лабораторных испытаниях и при анализе, она важна также при определении динамических характеристик конструкций, которые используются для нахождения реакции системы при более сложных формах вибрации. Виброперемещение при гармонической вибрации описывается выражением
z(t) = Ssin(ωt +), (1)
где S - амплитуда виброперемещения,
ω - угловая частота,
t- время,
- начальная фаза колебаний.
Виброскорость и виброускорение находят путём последовательного дифференцирования выражения:

 (2)
(2)
где ωS- амплитуда виброскорости;
S0=ω2S- амплитуда виброускорения.
Основными характеристиками гармонической вибрации являются: амплитуда виброперемещения, виброскорости, виброускорения и угловая частота колебаний.
Гармоническая вибрация часто характеризуется коэффициентом виброперегрузки:
 ,
(3)
,
(3)
где f- частота, Гц.
Полигармоническуювибрацию создают электродвигатели, вентиляторы и другие электромеханические устройства, имеющие несбалансированные быстровращающиеся массы /7/. Такую вибрацию (рисунок 1), можно разложить на сумму гармонических составляющих. Аналитически это разложение может быть представлено рядом Фурье:
 (4)
(4)

Рис. 1. Полигармоническая вибрация
Амплитуда Si и начальная фаза iкаждой i-й гармоники с частотой ωi=iω определяется по формулам:
 ;
;
 (5)
(5)
При использовании динамической (физической) модели конструкции РЭС в виде системы стержней и пластин (каркасы стоек, блоков, ячеек платы и т.д.) задача сводится к анализу колебаний в таких элементах и имеет типовые постановки и соответствующие ММ.
Модель продольных колебаний стержней включает уравнение:
 ,
(6)
,
(6)
где - амплитуда (смещение) точки;
с2=Е/;
Е- модуль упругости;
f(x,t)=F(x,t)/ - плотность внешней силы F(x,t), а также начальное условие
(x,0)=(x), (7)
 (8)
(8)
В качестве граничных условий используются следующие:
- условие I рода:
(0,t)=1(t), (l,t)=2(t), (9)
где l- длина стержня;
f1, f2- законы движения концов стержня;
-условие II рода:
 ,
(10)
,
(10)
 ,
(11)
,
(11)
где F1, F2- законы изменения силы, приложенной к концам стержня.
В частности, для упруго закрепленного при x=l стержня:
 ,
(12)
,
(12)
где k- коэффициент жесткости закрепления;
- условия III рода:
 ,
(13)
,
(13)
 (14)
(14)
где (t)- закон распределения точки закрепления стержня
В случае трехмерного объекта дифференциальное уравнение гиперболического типа имеет вид:
 (15)
(15)
Начальное условие постановки краевой задачи имеет вид:
 (16)
(16)
Для некоторых типовых конструкций РЭС (платы) используется модель поперечных колебаний пластины. Механические колебания в однородной пластине описываются уравнением:
 ;
(17)
;
(17)
где
 ;
(18)
;
(18)
 ;
(19)
;
(19)
T – напряжение пластины;
F(x,y,t)– приложенная сила.
При представлении конструкции в виде упругой пластины используется дифференциальное уравнение в частных производных 4-го порядка:
 ;
(20)
;
(20)
где
 –
цилиндрическая жесткость пластины;
–
цилиндрическая жесткость пластины;
σ–коэффициент Пуассона;
γ– удельный вес пластины;
ω0– собственные частоты пластины;
δ– толщина пластины.
Граничные условия:
–края пластины свободно опираются
 ;
; ;
(21)
;
(21)
–края жестко закреплены
;
 ;
(22)
;
(22)
–свободные края пластины
; (23)
 ;
(24)
;
(24)
В случае действия на пластину нагрузки (внешней силы), изменяющейся по гармоническому закону:
 ;
(25)
;
(25)
уравнение вынужденных колебаний формулируется в следующем виде
 ;
(26)
;
(26)
где
 ;
(27)
;
(27)
Внешние механические силы, действующие на объект, проявляются в перемещении его массы. При расчете этой силы предполагается, что объект представляет собой абсолютно твердое тело, которое не деформируется. Оценка механической нагрузки на объект может быть произведена по возникающим ускорениям. Если внешние возбуждающие силы меняются по периодическому закону и известна их частота и амплитуда, то возникающее при этом ускорение определяется по формуле:
 ,
(28)
,
(28)
где f - частота механических колебаний, Гц;
А - амплитуда перемещения, мм. Зная ускорение, можно найти силу, действующую на объект
 ,
(29)
,
(29)
где М — масса объекта, кг.
Между деформациями и внешними силами существуют определенные соотношения. Например, для однородного стержня с сечением S при воздействии на него силы F напряжение в данном сечении:
 (30)
(30)
Методика моделирования механических характеристик представлена в виде блок-схемы на рисунке 2.
Создание модели
Выполнение структурного анализа
Назначение свойств материала
Создание точечных сварок для моделирования винтового соединения
Закрепление отверстий
Создание нагрузки для имитирования силы тяжести
Создание и выполнение нового статистического анализа
Создание отчета результатов
Рис. 2. Методика моделирования механических характеристик
Литература
Норенков И.П. Основы автоматизированного проектирования: М.: Изд-во МГТУ им. Н.Э. Баумана, 2002. 360 с.
Курейчик В.М. Математическое обеспечение конструкторского и технологического проектирования с помощью САПР / В.М. Курейчик. М.: Радио и связь 1990. 352с.
Справочник конструктора РЭА: Общие принципы конструирования / Под ред. Р.Г. Варлатова. М.: Сов. Радио,1980. 480с.
Кофанов Ю.Н. Теоретические основы конструирования, технологии и надежности радиоэлектронных средств. М.: Радио и связь, 1991. 360 с.
Буланов А. Wildfire 3.0. Первые шаги. М.: Изд-во «Поматур», 2008. 240 с.
Системы автоматизированного проектирования в радиоэлектронике: Справочник / Е.В. Авдеев, А.Т. Еремин, И.П. Норенков, М.И. Песков; Под ред. И.П. Норенкова. М.: Радио и связь, 1986. 386 с.
Корн Г. Справочник по математики для научных работников и инженеров / Г. Корн, Т. Корн. М.: Наука, 1988. 832с.
Прокди Р.Г Pro/Engineer Wildfire 2. 0/3. 0/4.0. / Р.Г. Прокди, М.АМинеевМ.:Наукаитехника2008 г. 352 с.
ЧемодановаТ. В.Pro/ENGINEER: деталь, сборка, чертеж / Т.В.Чемоданова СПб.: Изд-во «BHV» 2003 г. 560 с.
Степанов А. В.Pro/ENGINEER. Специальный справочник / А.В.Степанов СПб.: Изд-во «Питер» 2001 г. 624 с.
УДК681.3
А.С. Лопатин, Л. Н. Никитин
АНАЛИЗАТОР ЭЛЕКТРОМАГНИТНЫХ ПОЛЕЙ
Компактное, экономическое, надежное и недорогое устройство, предназначенное для предупреждения приближения к линии электропередачи. Есть возможность блокирования исполнительного механизма.Анализатор электромагнитных полей (АЭП) является дополнительным средством защиты стрелы автомобильного грузоподъемного крана от попадания под напряжение при производстве монтажно-строительных работ вблизи действующих единичных линий электропередач.
Технические характеристики изделия АЭП:
Расстояние от стрелы до ЛЭП:
220В - 1кВ – 3м;
6кВ – 10кВ – 5м;
15кВ – 35кВ – 8м;
110кВ – 220кВ – 12м;
330кВ – 750кВ – 20м.
Напряжение питания 12-24В – 1 + 4В
Ток, потребляемый анализатором в режиме «Исправно» 0,1А
Масса, не более 0,5 кг
Габаритные размеры: 150х100х40 мм
Условия эксплуатации:
температура: -40°С до +55°С;
относительная влажность: 95% при температуре +40°С;
вибрационные нагрузки: 50 Гц с ускорением 5g;
ударные нагрузки: 10000 ударов с ускорением 10g.
Анализатор может выпускаться в двух модификациях:
а) звуковая и световая индикация, без блокировки механизмов поворота и подъема стрелы (для кранов, не оснащенных электрическим приводом блокировки механизмов поворота и подъема стрелы);
б) звуковая и световая индикация с блокировкой механизма поворота и подъема стрелы.
Принцип действия анализатора основан на регистрации электромагнитного поля линии электропередач антенным датчиком емкостного типа. Конструктивно анализатор состоит из двух блоков: блока антенн, устанавливаемых на стреле крана, соединенных между собой и блоком управления коаксиальным кабелем типа РК-5,и блока управления, устанавливаемого в кабине крановой установки. Структурная схема анализатора приведена на рисунке 1.

Рисунок 1 – Структурная схема анализатора
Генератор 100 Гц.
Электронный ключ (смеситель)
Генератор 1 Гц.
Линия связи
Антенны
Усилитель
Детектор
Логический блок
Сигналы частотой 100 Гц с генератора 1 поступают на вход электронного ключа 2, на управляющий вход которого поступают сигналы с генератора 3, частотой 1 Гц. Таким образом, на выходе электронного ключа 2 формируется сигнал, который представляет собой чередование паузы и посылки 100 Гц (тестовый сигнал).
Эти сигналы через линию связи 4 и антенну 5 поступают на вход усилителя 6, где усиливаются, затем выпрямляются детектором 7 и поступают на логический блок 8.
При исправности устройства и отсутствии воздействия электромагнитного поля ЛЭП на входе логического блока 8 присутствуют только детектированный тестовый сигнал, совпадающий по фазе с сигналом генератора 3. Тестовый сигнал фиксируется логическим блоком и индицируется миганием с частотой 1 Гц зеленого индикатора «Исправен».
При превышении допустимого уровня сигнала, наведенного электромагнитного поля ЛЭП, с выхода детектора 7 на логический блок 8 подается постоянно высокий уровень напряжения, что приводит к попеременному миганию красного индикатора «Опасно» и зеленого «Исправен».
В случае, если неисправна антенна (обрыв или короткое замыкание), усилитель 6 или смеситель 2 с выхода детектора 7 на логический блок 8 подается низкий уровень напряжения, при этом логический блок 8 фиксирует, что устройство неисправно, зеленый индикатор «Исправен» не горит, а красный индикатор «Опасно» горит постоянно.
Конструктивно блок может быть выполнен в металлическом корпусе. На лицевой панели должны находиться индикаторы «Опасно» красного цвета, «Исправен» зеленого цвета, четырех индикаторов выбираемого диапазона. На боковой поверхности корпуса находятся разъемы для подключения антенн и коммутации, резистор подстройки чувствительности и кнопка выбора диапазонов.
Антенный блок можно взять стандартный (например, от прибора УАС-1). Антенны монтируются с левой и правой стороны наиболее высокой точки фермы стрелы крана.
Настройку анализатора необходимо производить на специально оборудованной площадке с участком трехфазной четырехпроходной ЛЭП 220/380В. Площадка должна находиться вне зоны влияния высоковольтных воздушных ЛЭП и подземных кабельных линий. Стрелу необходимо приблизить на расстояние 3м от ЛЭП, и потенциометром «Чувствительность» добиться срабатывания сигнализации «Опасно».
Воронежский государственный технический университет
УДК681.3
А.С. Лопатин, Л. Н. Никитин
ЗВУКОВОЙ МИКШЕРСКИЙ ПУЛЬТ ДЛЯ ДОМАШНЕЙ СТУДИИ ЗВУКОЗАПИСИ
Устройство позволяет решать основную проблему переключения в домашней студии звукозаписи.Многие музыканты рано или поздно начинают задумываться о записи в студии. После покупки профессиональной звуковой стерео карты многие сталкиваются с проблемой коммутации звукового тракта.
В данной статье описывается прибор представляющий функционально законченное изделие, которое облегчает работу в домашней студии звукозаписи и решает проблемы коммутации.
Из неудобств, с которыми сталкивается большинство пользователей, можно отнести нехватку входных разъемов для дополнительных источников звука; неудобство смены дополнительных источников звука, если звуковая карта подключается в PCI слот; далеко не все звуковые карты имеют фантомное питание для конденсаторных микрофонов. А также в отличие от микшерского пульта, звуковую карту нельзя использовать без ПЭВМ.
Современные микшерские пульты имеют в своем комплекте процессор эффектов. Но при такой относительно дешевой стоимости микшера, ожидать от процессора высокого качества бессмысленно. Встроенный процессор иной раз выдает совершенно немыслимые обработки. Для обработки сигнала эффектами лучше использовать звуковую карту, и производить обработку на ПЭВМ.
Разработанный микшерский пульт является удобным вспомогательным устройством для решения коммутационных задач, которое обеспечивает необходимую маршрутизацию и студийный мониторинг. Микшер имеет 6 каналов, из них 2 микрофонных канала и 4 линейных. Такое количество каналов является оптимальным для домашней студии.
Одним из больших плюсов, который добавляет удобства в работе с микшером, является управление каналами по громкости с помощью фейдеров (регулятор уровня сигнала движкового типа), что дает возможность визуально видеть какой канал задействован. Индикатор уровня сигнала состоит из 24 светодиодов, что позволяет следить за уровнем в диапазоне от -30 дБ до +20 дБ.
Звуковой сигнал подается на любой из шести входов микшерского пульта и усиливается предварительным усилителем. Микрофонные каналы имеют балансный предварительный усилитель, предназначенный для снижения уровня помех. Для этого используются симметричные кабели и микрофонные разъемы типа XLR. Смысл симметричных линий в том, что они подавляют шумы, и делают это очень хорошо. Любой отрезок провода является антенной, принимающее хаотическое электромагнитное излучение. Выходной сигнал большинства микрофонов очень слаб, поэтому даже незначительные помехи для них будут относительно серьезными, а после прохождения предварительного усилителя микшера усилятся до опасной степени. В балансном предварительном усилителе фаза одного сигнала реверсируется на приемном конце линии, а другого остается неизменной. В результате этого звуковые сигналы становятся синфазными, а накладываемые помехи рассинхронизируются по фазе и поглощаются.
Высокие параметры предварительного усилителя достигаются за счет применения высококачественных малошумящих транзисторов 2N4401 и BC640 и малошумящих операционных усилителей NJM4580.
Микрофонные входы имеют возможность подключения конденсаторных микрофонов, для которых предусмотрена подача стабилизированного фантомного питания +48В.
Каждый канал микшера имеет трехполосный эквалайзер с глубиной регулировок ±15 дБ. Регуляторам НЧ, СЧ и ВЧ соответствуют частоты: 80 Гц, 2,5 кГц и 12 кГц. Когда входной сигнал достигает уровня на 3 дБ ниже уровня перегрузки, срабатывает индикатор пикового значения.
Помимо четырех линейных входов образующих стереопары, есть линейный стерео вход, который не подвергается частотной коррекции и не имеет ручек регулировки. Этот разъем предназначен для подключения звукового стерео источника (например СD-плеера).
Еще одним достоинством разработанного микшера является несвойственное другим моделям подобного класса, присутствие кнопок индивидуального прослушивания любого из каналов.
В микшере имеются главный выход, выход на мониторы, и наушники, а также присутствует цепь разрыва «посыл/ возврат», предназначенная для подключения какого-либо внешнего эффекта в цепь разрыва. С помощью соответствующих ручек регулировки по отдельной шине происходит подмешивание сигнала обработанного эффектом к основному сигналу.
Конструкция звукового микшера представлена на рисунке 1.

Рисунок 1 – Внешний вид звукового микшерского пульта
а) вид сверху; б) вид с боку; в) вид сзади.
На передней панели микшера (рисунок 1 а)) располагаются все органы управления, за исключением разъема и выключателя питания, которые в свою очередь располагаются на задней стенке корпуса (рисунок 1 в)).
Все разъемы, предназначенные для коммутации звукового тракта, располагаются в верхней части микшера. В средней части находятся органы управления частотной коррекцией, панорамы, и уровня сигнала подаваемого на внешний эффект. Также в средней части передней панели микшера находится индикатор уровня сигнала. В нижней части микшера располагаются регуляторы уровня сигнала, и кнопки индивидуального прослушивания каждого канала.
Конструктивно корпус микшера состоит из основания и крышки. Для обеспечения достаточной защиты от механических воздействий, корпус устройства изготавливается из алюминиевого сплава Д16 толщиной 1 мм методом гибки. Металлический корпус является экраном от внешних наводок и помех.
Наиболее теплонагруженными элементами микшера являются стабилизаторы напряжения, поэтому для отвода тепла к ним прикрепляется угловой пластинчатый радиатор. Для улучшения теплопроводности между тепловыделяющими элементами и радиатором нанесена паста КПТ-8.
Печатная плата закрепляется на крышке корпуса с помощью винтов прикрученных к стойкам, а так же с помощью элементов крепления разъемов. Это обуславливает достаточно прочное закрепление платы внутри корпуса.
Воронежский государственный технический университет
УДК 004.946
Р.Е. Медведцкий, М.А. Ромащенко
ОТРАБОТКА МЕТОДИКИ СОЗДАНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ ДЛЯ ВИРТУАЛЬНЫХ ТРЕНАЖЕРОВ
В данной статье рассматривается один из этапов создания виртуальных тренажёров, моделирующих реальные технологические процессы. Разработана методика создания моделей в 3D-редакторе. На примере тренировочного задания представлена модель сверлильного станка.
Процесс обучения делится на два зависящих друг от друга этапа. Первый этап это теория, а второй – практика. Они неразрывны, так как изучая теорию без практики, невозможно полностью ощутить объект познания. И наоборот, проводя различные опыты и эксперименты, не подкрёплённые теоретическими знаниями, трудно добиться результата.
По этому принципу (теория-практика) осуществляется обучение школьников, студентов, аспирантов. Теоретические знания обучаемые получают на уроках, лекция, семинарах, а практическое применение происходит на лабораторных работах, практических занятиях и экспериментах. Практическая деятельность должна осуществляться в специально оборудованных аудиториях, с необходимыми приборами, станками, лабораторными стендами. Но, к сожалению, не всегда есть возможность пользоваться этими приборами, в силу разных причин: нехватка материальных средств, невозможность размещения объекта в здании, создаваемая установкой опасность для окружающих и т.д.
В наш век информации и компьютеризации эту проблему можно успешно решить, создав виртуальные прототипы необходимых приборов, станков, рабочих модулей в компьютере. Научный прогресс достиг таких результатов, что теперь практическая деятельность учащихся может осуществляться сидя за компьютером.
Целью работы является создание программного комплекса для реализации универсальных виртуальных тренажёров технологического оборудования. Одним из важных требований является обеспечение высокой степени правдоподобности и детализации виртуальных прототипов, полностью соответствующее реальным аналогам.
Для достижения поставленной задачи необходимо было выбрать подходящие программы. Для создания необходимых нам объектов мы выбрали одну из наиболее мощных интегрированных средств 3D-моделирования, анимации и визуализации, программу под названием Autodesk 3ds Max. Для «оживления» созданных объектов наш выбор пал на среду программирования Delphi. Основными критериями выбора данных программ послужило: возможность использовать студенческие версии программ с полным набором функции; простота; многофункциональность.
Для оперативности действий наша группа решила распределить обязанности: часть группы занимается созданием 3D моделей в программе 3ds Max, а другая часть занимается программированием в среде Delphi.
Данная статья посвящена описанию методики созданием виртуальных моделей. Ключевым предметом работы был выбран вертикальный сверлильный станок. Этап создания объекта можно разделить на три условных части:
- создание каркаса;
- создание отдельных сложных элементов (сверло, ручка регулировки высоты сверла);
- добавление анимации к сцене.
Каркас для модели собирался из объектов с названием «куб с фаской». Данный объект находится на вкладке Geometry в списке улучшенных примитивов [1]. Этап создания каркаса являлся самым простым, относительно двух других этапов.
Создание модели сверла потребовало немало времени, но в итоге результат был получен. В программе 3 ds Max моделирование сложных объектов происходит посредством применения различных модификаторов к простым объектам (куб, сфера, конус и т.д). Из многочисленного списка модификаторов, представленных в программе, был выбран модификатор Twist (скручивание) [1]. Далее следовало выбрать предмет, который нужно скрутить, что бы получить аналогичную модель сверла. Выбор был между цилиндром и параллелепипедом. Применив модификатор к обоим объектам, результат не был получен, но в итоге стало ясно, что цилиндр не подойдёт для модели. Для достижения требуемого результата было увеличено количество сегментов по длине, ширине и высоте параллелепипеда. И после применения модификатора Twist была получена модель сверла, представленная на рисунке 1.

Рис.1. Модель сверла
Следующим сложным объектом стала ручка для регулировки высоты сверла. Сложность создания заключалась в том, что ручку необходимо было собрать из нескольких объектов и сделать их потом единым целым. Для объединения объектов сцены в программе используется группирование[1]. Создав все необходимые примитивы и расположив их в виде ручки, они были сгруппированы. Итоговая модель представлена на рисунке 2.

Рис. 2 . Модель ручки

Рис. 3. Модель станка
Что бы оживить сцену, добавить её динамичности, была сделана анимация опускания, кручения а затем поднимания сверла в исходное положение. Для достижения результата, использовалась скелетная анимация. Принцип построения данной анимации основан на передвижении объектов, напоминающих человеческую кость(за что и получили соответствующее название) [2].
Для экспортирования модели комнаты в среду программирования Delphi использовалась программа SMDExporter. Данная программа преобразовывала стандартный формат *max. в формат *smd., который приемлем для Delphi [3].
В результате данного этапа работы была отработана методика создания виртуальных прототипов, на примере тренировочного примера. Результат представлен на рисунке 3. Дальнейшим развитием работы является реализация реальной технологической установки.
Литература
1.Стиренко А. С. 3ds Max2009/3ds Max Design 2009. Самоучитель. – М.:ДМК Пресс, 2008, 544 с., ил ( Серия «Самоучитель»)
2.http://www.1-film-online.com
3.http://www.glscene.ru
Воронежский государственный технический университет
УДК 004.946
С.А. Некрасов, М.А. Ромащенко
МЕТОДИКА СОЗДАНИЯ ПРОСТОГО ВИРТУАЛЬНОГО ТРЕНАЖЕРА
В статье описывается методика создания простого приложения, имитирующего работу сверлильного станка. Дальнейшее применение и развитие этой методики позволит создавать виртуальные тренажеры, имитирующие внешний вид и физические свойства реального технологического оборудования
В настоящее время виртуальные тренажеры являются распространенным и доступным средством подготовки студентов. Широкие возможности компьютерных технологий в сочетании с существенно меньшими финансовыми затратами по сравнению со стоимостью физических стендов делают это направление весьма привлекательным для технических университетов.
Такие тренажеры позволяют реализовать практически все возможности реального технического оборудования посредством программной оболочки. Программная оболочка передает внешний вид исследуемого устройства, его конструктивные особенности и набор операций, выполняемых этим устройством, в ответ на какие-либо изменения извне. В качестве такого оборудования могут выступать станки с использованием ЧПУ.
В связи с тем, что теоретический курс подготовки специалистов не может дать полного представления о функционировании и технических особенностях оборудования, виртуальные тренажеры должны восполнить недостающие практические знания.
Для реализации виртуального мира были использованы следующие программные средства:
- Borland Delphi;
- 3D Studio Max;
- GLScene;
Выбор языка программирования ObjectPascalбыл обусловлен тем, что он одновременно, являясь простым и удобным, позволяет создавать трехмерный мир с активными зонами. В свою очередь надстройка для OpenGL – GLScene, обладающая удобным интерфейсом, позволяет производить экспорт трехмерный моделей из 3DsMaxв Delphi [1]. Далее будет описываться пример создания простого приложения, имитирующего самым простым образом работу сверлильного станка.
За основу будущей программы была взята модельпримитивного станка, заранее созданная в среде 3DsMax (рис. 1).

Рис.1 – Внешний вид используемой модели
На рисунке отчетливо видны будущие элементы управления (две кнопки и вращающаяся рукоятка) и сверло, опускающееся, для наглядности работы данного вида оборудования. Органы управления и рабочая область были анимированы непосредственно в среде 3DsMax,и все анимации были экспортированы в файлы с доступным для Delphiрасширением .smd .
Расширение .smd используется при создании костной анимации. При данном виде анимации в основном файле кость привязывается к какому либо объекту, а в файле с анимацией записывается лишь покоординатное перемещение данной кости, а привязанный объект перемещается следом за костью. Это позволяет значительно уменьшить размер файла и сэкономить компьютерные ресурсы [2].
Таким образом получилось 8 исходных файлов:
- файл, содержащий все кости и привязанные к ним движущиеся части;
- активирование сверла;
- вращение сверла;
- возврат сверла в исходное положение;
- нажатие кнопки «Вкл»;
- нажатие кнопки «Выкл»;
- два файла вращения рукоятки.
Далее, с помощью средств GlScene, основная модель была перемещена в программную оболочку, а из файлов анимации был составлен одномерный массив.
Следующим препятствием на пути по созданию программы стал способ активации данной анимации. Запускать ту или иную анимацию можно как при помощи «горячих» клавиш на клавиатуре, так и нажатием на нужную область кнопкой мыши.
В первом случае массиву с используемой анимацией назначаются соответствующие «горячие» клавиши. В результате получается, что при нажатии горячей клавиши, условно названной - «Пуск», проигрывается анимация нажатия кнопки на станке и дальнейшая его работа, а при нажатии горячей клавиши «Стоп» работа станка прекращается.
Во втором случае анимации воспроизводятся непосредственно после нажатия мышью на какой либо переключатель. То есть задействуются органы управления станка, изображенные на модели. Второй способ является более удобный, так как позволяет управлять исследуемой аппаратурой без включения в программу дополнительной справочной информации, что в свою очередь облегчает процесс обучения, но значительно затрудняет написание таких программ.
В этой статье был представлен на обозрение, наверное, чуть ли не самый простой пример, но даже создание такого приложения говорит о многом. Во-первых, простота создания таких приложений не требует глубоких познаний в области программирования, что в свою очередь подчеркивает доступность такого способа даже для начинающего программиста. Во-вторых, с помощью этого метода можно сознавать уникальные в своем роде тренажеры большой сложности и степени детализации.
Литература
1. Краснов М. В. OpenGL. Графика в проектах Delphi. – СПб.: БХВ-Петербург, 2002. – 352 с: ил.
2. Учебник по GLScene //Режим доступа: www.GLScene.ru.
Воронежский государственный технический университет
УДК 004.946
А.А. Пряхин, М.А. Ромащенко
СОЗДАНИЕ ДЕМОНСТРАЦИОННОГО ПРИМЕРА ПРОТОТИПА ВИРТУАЛЬНОГО ТРЕНАЖЕРА
Данная статья описывает один из способов создания виртуальной среды, моделирующей помещение для тренажера, и способы помещение и программирование готовых моделей оборудований. А также задает дальнейшее развитие проекту
Успех предприятия напрямую зависит от эффективности работы его сотрудников. Поэтому проблема обучения персонала актуальна для многих компаний. Сам процесс обучения очень затратный. Так, для того, чтобы рабочий грамотно обслуживал оборудование, он должен знать все аспекты, принципы и подходы к конкретному устройству, это достигается путем комплексного изучения подготовительного материала. Подготовительный материал включает виртуальную среду, симулирующую работу действительного оборудования, и специализированную документацию. Таким образом, создание обучающей виртуальной среды достаточно актуальная и перспективная научная работа.
Как же создать такую среду? Мы будем использовать объектно-ориентированный язык программирования DELPHI (Object Pascal), собственно программу Delphi 7, являющейся одной из самых популярных в мире средств быстрой разработки программ для Windows [1]. Потребуется открытая графическая библиотека OpenGL, а для упрощения работы с ней будет использован модуль для Delphi7 – GLScene (бесплатный для коммерческого и некоммерческого использования OpenGL-ориентированный графический движок с открытым исходным кодом) [2].
Демонстрационный проект нужен для того, чтобы научится создавать мини среду, впоследствии к которой будут добавляться дополнения, модели, анимация и т.п. - проект развивается.
Поместим на форму компоненты GLScene, GLSceneViewer, GLCadencer, GLMaterialLibrary из вкладки GLScene, GLNavigator, GLFPSMovementManager и Timer из вкладки GLScene Utils . GLScene - это инспектор объектов сцены; GLSceneViewer - прямоугольная область на форме, для отображения сцены. GLCadencer и Timer –таймеры. Они отвечают за то, чтобы регулярно обновлять объекты, которые в этом нуждаются (например, анимации моделей и системы частиц), считать физику, обрабатывать события мыши и клавиатуры, выполнять код и много др.


Рис. 1. Рабочие окна демонстрационной программы
Добавим комнату (куб). Однако на вьювере(GLSceneViewer) ничего не изменится, потому что куб расположен с камерой в одних и тех же координатах. Оси x,y,z отличаются от привычных нам, т.к. здесь ось Y - высота, X - длина, Z - ширина. Для удобства установим отображение координатных осей куба: ShowAxes = True (X - красная ось, Y - зелёная, Z - синяя). Создадим постоянный источник света, иначе все будет черного цвета. Также создадим сферу (персонаж) которая не будет давать проходить камере сквозь объекты. Нужно привязать свет, камеру и сферу к одному объекту, при изменение координат которого, будут меняться абсолютные координаты света, сферы и камеры, а это очень удобно.
Сделаем возможность перемещать полученный объект(С+С+К) относительно нашей комнаты. Добавляем freeform’ы, загружаем их в нашу комнату, далее все текстурируем, добавляем возможность включать, выключать дополнительный свет, тени, отображения полигонов(граней объектов),гравитацию, программируем нужные нам действия.
Результатом вышеописанных действий является демонстрационная программа, рабочие окна которой представлены на рисунке 1.
В качестве дальнейшего развития проекта предполагается проработать следующие направления:
- усовершенствование графического движка;
- создание и внедрение в программу реальных механизмов, станков, оборудований;
- создание удобного и понятного интерфейса;
- тестирование, откладка и выпуск данного ПО для использования в обучающих заведениях.
Список литературы.
Анатолий Хомоненко. Delphi 7. Наиболее полное руководство. – BHV - Санкт – Петербург, 2006. – 1216 с.
http:// glscene.org
УДК681.3
К.А. Гранкин, Л. Н. Никитин
УСТРОЙСТВО ВОССТАНОВЛЕНИЯ УРОВНЯ ЦИФРОВОГО СИГНАЛА
Разработанное устройство восстановления уровня цифрового сигнала (УВЦС) входит в состав аппаратуры, необходимой для организации цифровых систем передачи и представляет собой усилитель-регенератор цифровых потоков.
УВЦС обеспечивает передачу данных со скоростью 2048 или 1024 кбит/с. Допустимое затухание сигнала на линейном входе от 0 до 45 дБ. Допустимое переходное затухание в кабеле между парами приема и передачи – не менее 60 дБ. Электропитание УЛТ осуществляется от стационарной сети 60В с током 50мА.
Принцип работы УВЦС рассмотрим на примере функциональной схемы (рисунок 1). Линейный сигнал направления А поступает на устройство грозозащиты приемника, состоящее из линейного трансформатора и разрядников. Далее сигнал поступает на усилитель корректирующий унифицированный (УКУ), который осуществляет автоматическую коррекцию амплитудно-частотных искажений, вносимых кабельным участком в диапазоне затуханий от 0 до 45 дБ. Усиленный сигнал поступает на пороговое устройство, регенерационный и выходной каскады ПУ-РК, где происходит формирование сигнала для станционного стыка. Устройство тактовой синхронизации (УТС) производит выделение сигнала тактовой частоты из спектра цифрового рабочего сигнала и устанавливает фронты тактового сигнала строго по середине символов рабочего сигнала. Для контроля наличия линейного сигнала служит датчик линейного сигнала (ДЛС).
“ЛС”

Рис. 1. Функциональная схема УВЦС
Стационарный сигнал направления Б поступает в линию через устройство грозозащиты передатчика, выполненное аналогично устройству грозозащиты приемника.
Электропитание усилителя осуществляется от стационарной сети 60В или дистанционно по фантомной цепи линейного кабеля (через средние точки линейных трансформаторов).
Устройство УП выполняет функции вторичного источника питания и вырабатывает стабилизированное напряжение +5В и -3В.
Конструктивно УВЦС выполнен на одной печатной плате, установленной на металлическое основание и закрытой крышкой. На лицевой части основания расположены разъемы для подключения к линейному кабелю и станционному оборудованию, органы управления и индикации.
Электрическая принципиальная схема усилителя представлена на рисунке 2. Грозозащиту обеспечивают разрядники F1-F6. Исполнения УЛТ -45 дБ со скоростью 2048 или 1024 кбит/с отличаются установкой перемычек на плате: для УЛТ -45 дБ устанавливаются перемычки 1-5, 2-6, для УЛТ -45 дБ 1-6, 2-5. Тактовая синхронизация осуществляется с помощью тактового генератора УТС, конструктивно выполненного на микросхеме 198НТ1Б и транзисторах 2Т326Б. Стабилизированное напряжение +5В и -3D вырабатывается источником питания, собранным на микросхеме 140УД12, транзисторах 2П103Д, КТ816Г, 2Т316Б, стабилитроне КС139А и выполняет роль вторичного источника питания.

Рис. 2. Схема электрическая принципиальная
На основе вышеизложенного можно признать, что данный усилитель позволяет в значительной мере регенерировать (восстановить) номинальный уровень цифрового сигнала, его электрические и временные параметры при затухании в линии до 45 дБ, а также осуществить грозозащиту и коррекцию амплитудно-частотных искажений, вносимых кабельным участком. Предлагаемое устройство позволяет в 30 раз увеличить объем передаваемой информации. Элементная база рассматриваемого устройства отечественного производства, что позволяет изготавливать усилитель линейного тракта гораздо дешевле, чем с применением импортных электрорадиоэлементов.
Воронежский государственный технический университет
УДК681.3
К.А. Гранкин, Л.Н. Никитин
УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ
Устройство для регистрации ионизирующего излучения позволяет оценить мощность экспозиционной дозы бета-излучения и гамма-излучения
Устройство и принцип работы
В соответствии с литературными данными известно, что измерение мощности экспозиционной дозы рентгеновского и гамма-излучения дозиметра основано на измерении интенсивности сцинтилляций воздухоэквивалентного сцинтиллятора, которая пропорциональна измеряемой мощности экспозиционной дозы. В качестве воздухоэквивалентного сцинтиллятора часто используется органический сцинтиллятор на основе полистирола. Эффективный атомный номер сцинтиллятора близок эффективному атомному номеру воздуха. Фотоумножитель (ФЭУ), регистрирующий вспышки сцинтиллятора, может работать в токовом режиме. С помощью аналого-цифрового преобразователя ток ФЭУ преобразуется в импульсы напряжения, частота следования которых пропорциональна измеряемому току.
Таким образом, число импульсов, в единицу времени, сосчитанных пересчетным устройством (и зафиксированное на цифровом индикаторном табло), должно быть пропорционально измеряемой мощности экспозиционной дозы, а полное число импульсов за определенное время будет пропорционально экспозиционной дозе за это время.
Дозиметр может оценить наличие бета-излучения, как при наличии, так и при отсутствии гамма-излучения. О наличии бета-излучения судят по разности показаний дозиметра при надетом на блок детектирования съемном стакане и без него.
Структурная схема дозиметра представлена на рисунке.
Дозиметр работает следующим образом: ток ФЭУ поступает на аналого-цифровой преобразователь (АЦП), импульсы АЦП поступают на схему управления режимом «мощность дозы» и «доза», после которой на пересчетную схему, а с нее на табло индикации, содержащее четыре цифровых индикатора типа АЛС324Б на базе светодиодов.
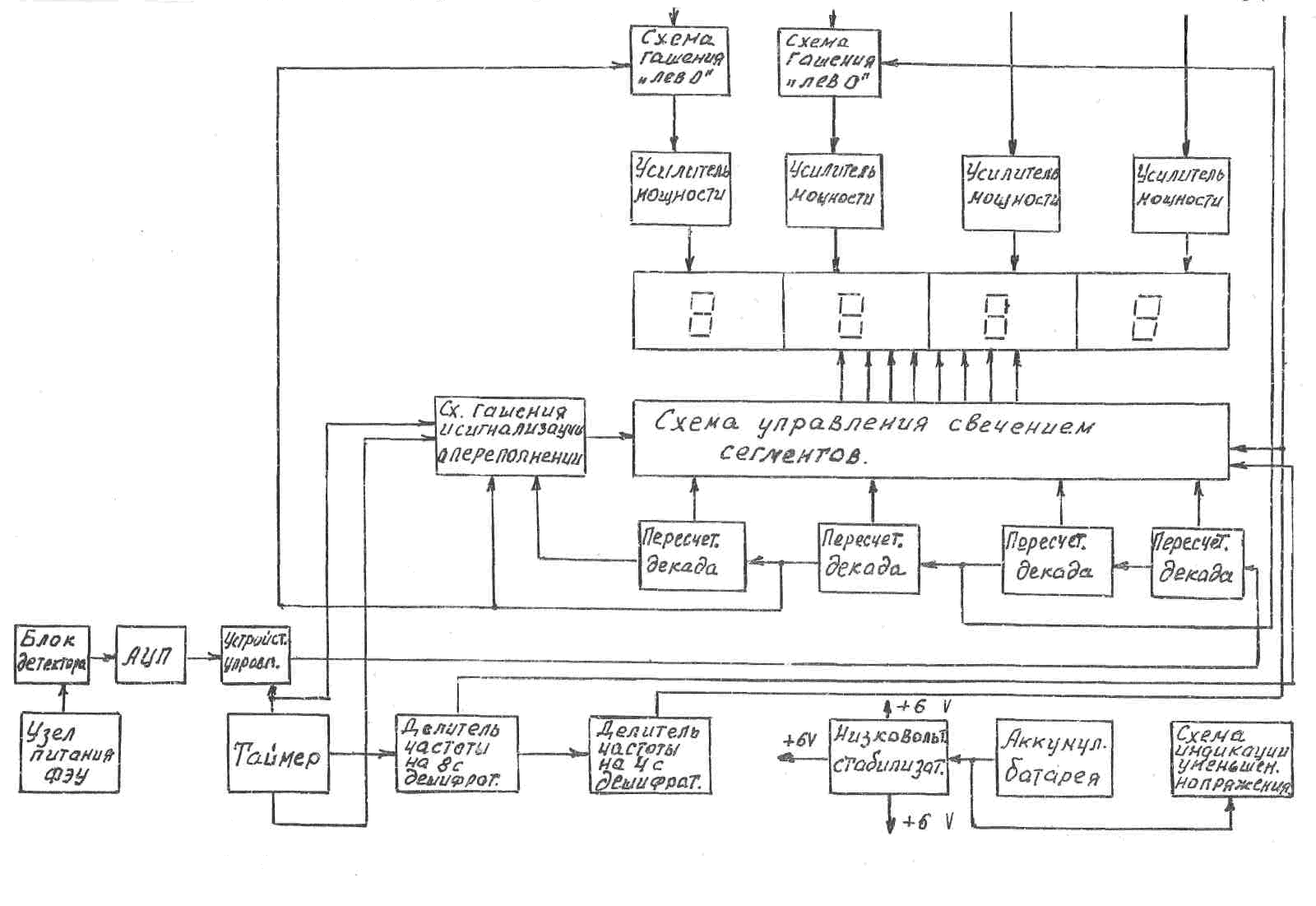
Рис. 1. Схема электрическая принципиальная
В целях экономии емкости аккумуляторов узел индикации работает в режиме динамического опроса, когда в каждый момент времени светится только один элемент цифрового индикатора АЛС324Б. С этой же целью, когда регистрируются малые уровни излучения (информация поступает только с цифровых индикаторов низших разрядов), специальная схема (схема гашения «левых нулей») обеспечивает гашение цифровых индикаторов высших разрядов, на которых в это время нет информации. Если же на цифровых индикаторах высших разрядов появляются отличные от нуля значения, то эти цифры загораются.
Дозиметр имеет режим работы, при котором прибор измеряет экспозиционную дозу от 1 до 9999 МR.
При превышении показаний индикаторного табло 9999 специальная схема (схема гашения и сигнализации о перевыполнении), обеспечивает мигание цифр с частотой около 16 Hz. Эта же схема обеспечивает гашение цифровых индикаторов с периодом 1 с что уменьшает потребляемую дозиметром мощность.
Питание дозиметра осуществляется от аккумуляторов. Поскольку напряжение аккумуляторов в процессе работы непрерывно падает, дозиметр имеет узел стабилизации низковольтного напряжения, обеспечивающего стабилизированным напряжением все низковольтные электрические цепи дозиметра. Для питания ФЭУ дозиметр имеет узел стабилизированного высоковольтного питания.
Кроме того, дозиметр имеет специальную схему индикации уменьшения напряжения питания аккумуляторных батарей ниже нормы, которая обеспечивает зажигание сигнального светодиода, расположенного на передней панели дозиметра, в любом режиме его работы.
Назначение изделия
Дозиметр предназначен для измерения экспозиционной дозы и мощности экспозиционной дозы рентгеновского и гамма-излучений, а также качественной оценки наличия бета-излучения.
Дозиметр применяется в промышленности и лабораториях для оперативного дозиметрического контроля радиационной обстановки.
Технические характеристики
Дозиметр измеряет экспозиционную дозу и мощность экспозиционной дозы рентгеновского и гамма-излучения в диапазоне энергий от 1 до 9999 Мрад.
Время установленного рабочего режима не превышает 1 мин, при этом чувствительность дозиметров через 1 мин после включения не отличается от чувствительности через 15 мин после включения более чем на ±10 %. Нестабильность показаний дозиметров за 6 Н непрерывной работы не должна превышать ±10 % от среднего значения показаний за этот промежуток времени.
Питание дозиметров осуществляется от 28 аккумуляторов типа Д-0,1. Ток, потребляемый дозиметром при максимальном значении напряжения питания аккумуляторной батареи (8,7 V), не должен превышать 40 мА. Средняя наработка на отказ дозиметров не менее 5000 Н.
Таким образом, разработанная конструкция дозиметра отвечает нормам технического задания и может использоваться не только в стационарных условиях, но и в полевых. Для этого следует использовать средства герметизации корпуса и обеспечить демпфирующими приспособлениями для перевозки прибора на подвижном составе различного назначения (железнодорожный транспорт, морские суда, автотранспорт).
Литература
1. Влияние облучения на материалы и элементы электронных схем: пер с англ./Под. ред. В.Н. Быкова, А.С. Савельева, М.:Атомиздат,1967. - 427с
Воронежский государственный технический университет
ЗАКЛЮЧЕНИЕ
Работы, входящие в данный сборник, посвящены различным вопросам и задачам обеспечения и повышения качества и надежности радиоэлектронных устройств, приборов, комплексов и систем, программно-технических систем и комплексов, освещают вопросы разработки соответствующих методик, моделей, алгоритмов, методов проектирования, анализа и оценки показателей качества и надежности, отражают результаты практических и теоретических исследований, проектных работ, проведенных в вузах и предприятиях г. Воронежа. Опубликованные статьи отражают современный уровень и перспективные направления в области создания и производства высоконадежных радиоэлектронных средств, технических и программно-технических систем, имеют прикладную направленность и охватывают широкий круг вопросов, связанных с проектированием, испытаниями, изготовлением и эксплуатацией данного класса устройств и систем.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ……………………………………………………………..3
И.И. Застрожнов, С.А. Змеев, Д.В. Волков, В.С. Гундарев, А.А. Змеев
Формализация управления доступом перспективных систем защиты информации в автоматизированных системах……..………….….…4
С.А. Змеев, Д.В. Волков., А.А. Змеев, В.П. Кутовой определение показателей для комплексной оценки эффективности системы защиты информации в автоматизированных системах……………………………………………………….…….…8
С.А. Змеев, Д.В. Волков, А.А.Змеев, В.В. Гундарев, Д.А.Солод
Методика оценки эффективности систем защиты информации в автоматизированных системах…….…………………………….….11
Змеев С.А., Волков Д.В., Селютин И.Н., Гуляев О.А., Змеев А.А. Актуальность проблемы информационной безопасности систем электронного документооборота…..………………………………..17
И.Н.Селютин, Д.В. Волков, В.С. Гундарев
К вопросу формирования оптимальной структуры систем защиты информации от НСД в автоматизированных системах……..…..….19
С.В. Белокуров, А.А. Змеев, В.А. Хвостов, Р.А. Родин Нормирование требований к основным элементам автоматизированной системы информационной безопасности………………………………………………………..…27
С.В. Белокуров, А.А. Змеев, В.А. Хвостов, Р.А. Родин
Алгоритм нормирования требований к информационной безопасности автоматизированной системы………………..……....30
С.В. Белокуров, А.А. Змеев, В.А. Хвостов, Р.А. Родин
Методика тестирования рабочей среды автоматизированных систем управления критического применения…….……………………….32
А.А. Змеев
Алгоритм аутентификации пользователей автоматизированных систем защиты информации………………………..……………….34
А.А. Змеев
Формализация критериев для построения систем защиты информации от несанкционированного доступа………..………….36
М.В Попова, А.И. Мушта
Моделирование цифрового устройства на RTL уровне…………………………….………………………………..…39
М.А. Цуканова, В.А. Кондусов
Измеритель амплитудно-частотных характеристик на базе пк…………………………………………………………………...….46
М.В. Попова, А.И. Мушта
Разработка асинхронного коммуникационного интерфейса ХОСТ-машины и микропроцессора………………………………………49
А.В. Турецкий, Т.И. Кораблинова
Разработка конструкции автомата включения освещения………………….………………………………………....52
А.П. Собина, В. А. Кондусов
Стабилизатор частоты вращения микроэлектродвигателя постоянного тока…………….……………………………….…….….54
Н.Г.Котляр, В.С. Цымбалюк
Электроакустический датчик …………………………….……….….57
С.П. Теплинских, И.В. Андреев
акселерометр на поверхностных акустических ……………………………………………………………………….…59
А.Б. Карпелянская, В.А. Кондусов
Стробоскопический тахометр…………………………………….…62
И.В. Попова, А.В. Турецкий
Конструкция блока питания для возимой радиостанции……….…65
А.О. Горшков
Стабилизатор напряжения с регулируемой защитой по току…..…71
В. В. Иванов, В.С. Скоробогатов, Ю.М. Данилов
О пайке микросхем……………………………………………..….…74
Е.Н. Циблиев, В.С. Скоробогатов, Ю.М. Данилов
Герметизация транзисторов и микросхем…………..………………79
Данилов Ю. М., Прилепин Д.А., Скоробогатов В.С.
Устройство обнаружения дыма……………………………………….83
Данилов Ю. М., Красноперов О.В., Скоробогатов В.С. Устройство измерения звуковых сигналов…………..…………………………………………………..86
В. В. Кастерин, Ю. М. Данилов, В.С. Скоробогатов
О передаче сведений по охране и контролю состояния экологически опасных объектов………………………………………………………89
А.В.Башкиров, И.В.Остроумов, И.В. Свиридова
Методы рационального кодирования……………………………...…91
А.В.Башкиров, И.В.Остроумов, И.В.Свиридова
Основы системы передачи данных по радиоканалу…………………………………………………………...96
И.А. Лозовой, А.В. Турецкий
Этапы анализа радиоэлектронных модулей на механическую прочность……………………………………………………………100
И.А. Лозовой, А.В. Турецкий
Методика обработки результатов испытаний паяных соединений компонентов радиоэлектронных модулей…………........................105
И.А. Лозовой, А.В. Турецкий
Структура испытательного стенда испытания паяных соединений компонентов радиоэлектронных модулей на механические воздействия………..…………………………………………………110
А.В. Турецкий моделирование и оптимизация механических характеристик специализированных блоков питания……………114
А.С. Лопатин, Л. Н. Никитин
Анализатор электромагнитных полей…………………………….132
А.С. Лопатин, Л. Н. Никитин
Звуковой микшерский пульт для домашней студии звукозаписи…………………………………………………………135
Р.Е. Медведцкий, М.А. Ромащенко
Отработка методики создания трехмерных объектов для виртуальных тренажеров………………………..…………………..138
С.А. Некрасов, М.А. Ромащенко
Методика создания простого виртуального тренажера…………....142
А.А. Пряхин, М.А. Ромащенко
Создание демонстрационного примера прототипа виртуального тренажера……………………………………………………………..145
К.А. Гранкин, Л. Н. Никитин
Устройство восстановления уровня цифрового сигнала…………148
К.А. Гранкин, Л.Н. Никитин
Устройство для регистрации ионизирующего излучения………..151
Заключение……………………………………………….………….154
Научное издание
ПРОБЛЕМЫ ОБЕСПЕЧЕНИЯ
НАДЕЖНОСТИ И КАЧЕСТВА
ПРИБОРОВ, УСТРОЙСТВ И СИСТЕМ
В авторской редакции
Компьютерный набор И.А. Новиковой
Подписано к изданию 28.12.2012.
Объем данных 3,93 МБ
ФГБОУ ВПО «Воронежский государственный технический университет»