

11. Аналоговые регуляторы
Рассмотрим общий принцип построения структуры АР непрерывного действия. Если включить встречно-параллельно регулирующему блоку устройство ОС, за исключением И-регулятора, который не имеет дополнительной ОС, то передаточная функция АР будет иметь вид
![]() ,
(11.1)
,
(11.1)
или
![]() ,
(11.2)
,
(11.2)
где Wр.б(p) и WОС(p)—передаточные функции соответственно регулирующего блока и устройства ОС.
Членом 1/Wр.б(p) в знаменателе последнего выражения при приближенных расчетах можно пренебречь, тогда
![]() ,
(11.3)
,
(11.3)
то есть передаточная функция устройства ОС может быть легко получена, если известна передаточная функция регулятора.
Уравнения регуляторов, созданных из реальных элементов, обычно существенно отличаются от уравнений идеализированных регуляторов. В модели реального регулятора это учитывается путем последовательного включения со звеном идеального регулятора одного или нескольких балластных апериодических звеньев.
Передаточная функция реального регулятора
![]() ,
(11.4)
,
(11.4)
где WP(р) и Wбал(р)— передаточные функции идеального регулятора и балластного звена.
Рассмотрим характеристики структурных схем регуляторов непрерывного действия.
Пропорциональные регуляторы. Идеальный П-регулятор имеет передаточную функцию, определяемую выражением WП(p)=kр. Реальный промышленный регулятор имеет усилительное звено WУ(p)=kу и исполнительное устройство, например в виде электрического ИМ
![]() .
.
Электрический ИМ в динамическом отношении—интегрирующее звено, следовательно, для получения закона П-регулирования необходимо, чтобы он имел ООС. Для обеспечения условия
![]()
с целью повышения коэффициента передачи прямого канала ООС должно иметь и усилительное звено WУ(p)= kу регулятора.
Требуемую передаточную функцию канала ОС найдем из уравнения (11.3)
![]() ,
,
откуда
![]() .
(11.5)
.
(11.5)
Таким образом, канал ОС в динамическом отношении должен быть выполнен в виде усилительного звена с коэффициентом передачи kос=1/kр, то есть равным обратному значению коэффициента передачи разрабатываемого П-регулятора.
С учетом изложенного структурная схема реального П-регулятора должна иметь вид, представленный на рисунке 11.1, а.
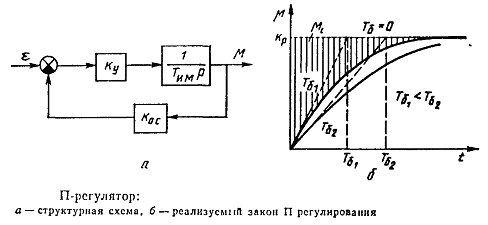
Рис. 11.1
Оценим точность реализации закона П-регулирования реальным
П-регулятором с данной структурной схемой.
Передаточная функция П-регулятора:
![]() (11.6).
(11.6).
Таким образом, реальный П-регулятор со структурной схемой (см. рис. 11.1, а) представляется в динамическом отношении в виде идеального П-регулятора
![]() (11.7)
(11.7)
и некоторого балластного звена
![]() .
.
Балластное звено в динамическом отношении—апериодическое. Коэффициент передачи балластного звена равен единице, а постоянная времени
![]() .
.
Временная характеристика реального П-регулятора со структурной схемой (см. рис. 11.1, а) представлена на рисунке 11.1, б. Параметр настройки регулятора—это коэффициент передачи kос устройства ОC. Чем меньше (больше) kос, тем больше (меньше) коэффициент kр передачи регулятора.
Одновременно следует иметь в виду, что чем больше kр, тем больше постоянная времени балластного звена и тем больше искажается идеальный закон П-регулирования. Для уменьшения влияния балластного звена при конструировании П-регуляторов по структурной схеме (см. рис. 11.1, а) следует стремиться к максимально возможному значению коэффициента усиления kу. Текущее значение динамической ошибки μi реализации закона П-регулирования при Тбал=Т1бал показано на рисунке 11.1, б.
Пропорционально
-
интегральные регуляторы. Идеальный
ПИ-регулятор имеет передаточную
функцию, определяемую выражением
![]() .
При применении в качестве исполнительного
устройства в ПИ-регуляторе ИМ с
передаточной функцией интегрирующего
звена WИМ(р)=1/(ТИМр),
структурные схемы регуляторов могут
разрабатываться в нескольких вариантах,
основные из которых представлены на
рисунке
11.2.
.
При применении в качестве исполнительного
устройства в ПИ-регуляторе ИМ с
передаточной функцией интегрирующего
звена WИМ(р)=1/(ТИМр),
структурные схемы регуляторов могут
разрабатываться в нескольких вариантах,
основные из которых представлены на
рисунке
11.2.
По структурной схеме (см. рис. 11.2, а) формирование закона ПИ-регулирования осуществляется аналогично идеальным
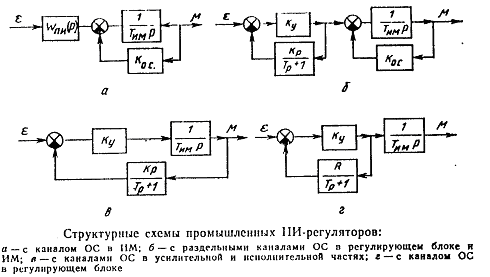
Рис. 11.2
ПИ-регулятором. Для уменьшения отрицательного влияния на закон ПИ-регулирования ИМ он имеет ООС в виде усилительного звена WОС(p)=kос. Для данной схемы закон ПИ-регулирования реализуется с погрешностью, определяемой балластным апериодическим звеном, постоянная времени которого
![]() .
(11.8)
.
(11.8)
Из выражения (11.8) следует, что чем больше kос, тем меньше Тбал и погрешность реализации закона ПИ-регулирования. Однако при этом следует иметь в виду, что при увеличении kос уменьшается коэффициент передачи ПИ-регулятора, который согласно формуле равен отношению kр/kос. Для сохранения требуемого значения коэффициента передачи регулятора одновременно с увеличением kос следует пропорционально увеличивать kр.
На рисунке 11.2,б представлена структурная схема, в которой закон ПИ-регулирования реализуется за счет динамических свойств канала ОС в усилительной части регулятора.
Для того чтобы структурная схема была реализована по закону ПИ-регулирования, необходимо канал ОС в усилительной части регулятора выполнить в виде реального дифференцирующего звена
![]() .
(11.9)
.
(11.9)
На рисунке 11.2, в представлена структурная схема в которой закон ПИ-регулирования реализуется за счет динамических свойств канала ОС как в усилительной, так и в исполнительной части регулятора. Необходимая передаточная функция ОС в этом случае, так же как и для схемы на рис. 11.2, б, должна определяться выражением (11.9), но при k=ТИ/kр.
На рисунке 11.2, г приведена структурная схема регулятора, имеющая принципиальное отличие от предстоящих схем в том, что в ней динамические свойства интегрирующего ИМ использованы для формирования закона ПИ-регулирования. В этом случае необходимую передаточную функцию канала ОС можно найти из условия
![]() .
(11.10)
.
(11.10)
Если передаточная функция регулятора определяется выражением
![]() ,
то
,
то
![]() ,
,
или
![]() ,
,
где k=TИ/(kрТИМ), Т=ТИ; ТИ—время изодрома.
Таким образом, в качестве ОС в структурной схеме (см. рис. 11.2, г) для обеспечения закона ПИ-регулирования следует применять апериодическое звено W(p)==k/(TР+1), а следовательно, и передаточные функции балластных звеньев, искажающих закон ПИ-регулирования, можно определить так же, как это сделано выше для регуляторов со структурной схемой (см. рис. 11.2, а).
Характер искажения закона ПИ-регулирования в структурной схеме (см. рис. 11.2, а) представлен на рисунке 11.3, из которого видно, что чем меньше постоянная времени балластного звена, тем меньше погрешность реализации закона ПИ-регулирования. При ТБАЛ=0 погрешность равна нулю. Текущее значение динамической ошибки реализации закона ПИ-регулирования μi, показано для случая Т1БАЛ>Т2БАЛ.
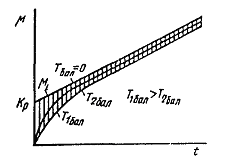
Рис. 11.3. Характер реализации закона ПИ- регулирова6ния со структурной схемой, показанной на рисунке 11.2
Так как ИМ регулятора при монтаже располагается непосредственно у объекта регулирования, а аппаратурная часть регулятора размещается, как правило, в пункте управления объектом, то при выборе структурной схемы регулятора при прочих равных условиях следует иметь в виду, что схема (см. рис. 11.2, г) требует меньшего расхода кабельно-проводниковых материалов (при электрическом ИМ) или трубных проводок (при пневматическом или гидравлическом ИМ).
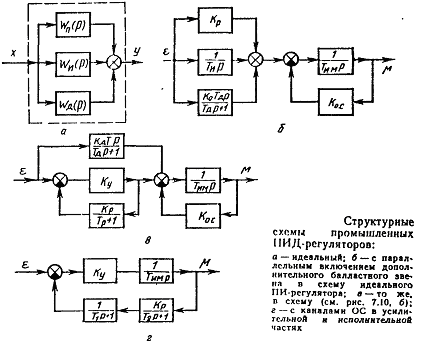
Рис. 11. 4
Следует отметить, что балластное звено в виде апериодического звена как в случае ПИ-регулятора, так и для П-регулятора часто оказывает положительное влияние на процесс регулирования. Так, при кратковременных отклонениях регулируемой величины благодаря демпфированию балластного звена ИМ автоматической системы с таким регулятором не срабатывает, что повышает срок его службы. С учетом этого в регуляторах типа «Каскад» и АКЭСР предусматриваются даже специальные демпфирующие устройства входного сигнала.
Пропорционально - интегрально - дифференциальные регуляторы можно сконструировать по структурной схеме идеального ПИД-регулятора (рис. 11.4, а). Так как фактическая реализация идеального дифференцирующего звена в общем случае представляет большие трудности, то в практических схемах используется реальное дифференцирующее звено W(p)==kTР/(TР+l). Для уменьшения погрешности в реализации закона ПИД-регулирования интегрирующий ИМ, как и в случае реализации закона ПИ-регулирования по схеме (см: рис. 11.2, а), имеет ООС с передаточной функцией WОС(р)=kос>>1. С учетом этого структурная схема такого реального ПИД-регулятора имеет вид, представленный на рисунке 11.4, б.
Если сравнить передаточную функцию реального и идеального ПИД-регуляторов, то увидим, что регулятор со структурной схемой (см. рис. 11.4, б) реализует закон ПИД-регулирования с погрешностью, определяемой передаточной функцией WБАЛ(р) балластного звена, и, кроме того, составляющая закона Д-регулирования реализуется с дополнительной погрешностью, определяемой функцией WД.БАЛ(р) второго балластного звена.
При соблюдении условия WОС(p)>>1/WУ(р) приближенную передаточную функцию можно представить в виде
![]() .
(11.11)
.
(11.11)
Параметрами настройки ПИД-регулятора являются kр, TИ, kД и ТД. Сравнивая структурные схемы (см. рис. 11.4, а и 11.4, б), видим, что реальный ПИД-регулятор со схемой (см. рис. 11.4, б) получается из структурной схемы (см рис. 11.2, а) реального ПИ-регулятора, при включении параллельно звеньям, формирующим закон ПИ-регулирования, звена с передаточной функцией
![]() .
(11.12)
.
(11.12)
Такой метод формирования закона ПИД-регулирования широко применяется при разработке регуляторов. Примером этого может служить также ПИД-регулятор со структурной схемой (рис. 11.4, в) при ее сопоставлении со схемой (см. рис.11.2, б) ПИ-регулятора.
В связи с этим отечественной приборостроительной промышленностью выпускаются специальные устройства, называемые дифференциаторами, реализующие передаточную функцию (11.12). С учетом этого для практической реализации закона ПИД-регулирования применяются или ПИД-регуляторы (см. рис. 11.4, б, в), или ПИ-регуляторы (см. рис. 11.2, а, б) в комплекте с дифференциаторами.
На рисунке 11.2, г представлена структурная схема, в которой закон ПИД-регулирования реализуется за счет динамических свойств канала ОС как в усилительной, так и в исполнительной части регулятора.
При соблюдении условия WОС(p)>>1/WУ(p) в соответствии с формулой (11.3) имеем
![]() .
.
Для данной схемы ПИД-регулятора
![]() ,
(11.13)
,
(11.13)
где k=ТИ/kр
Таким образом, для реализации ПИД-регулятора со структурной схемой (см. рис 11.4, г) необходимо, чтобы канал ОС состоял из последовательно включенных апериодического и реального дифференцирующих звеньев.
Реальные ПИД-регуляторы со структурными схемами (рис. 11.4) реализуют законы ПИД-регулирования с погрешностью, зависящей от степени соблюдения условия (11.3) и параметров настройки дифференцирующей части (11.13) в схемах на рисунках 11.4, б, в.
На рисунке 11.5 показана переходная характеристика ПИД-регулятора 1 со структурной схемой (см. рис. 11.4, б). Для сравнения на этом же рисунке приведена переходная характеристика идеального ПИД-регулятора 2. Следует отметить, что промышленные ПИД-регуляторы со структурными схемами (см рис. 11.4, б, в) могут реализовать различные законы регулирования с любым сочетанием П-, И- и Д-составляющих закона ПИД-peгулирования.
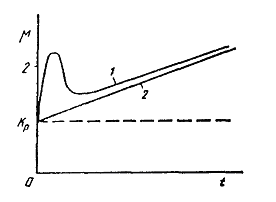
Рис. 11.5. Переходные характеристики ПИД регуляторов:
1- со структурной схемой (см. рис.11. 4, б); 2- идеального
Регулирующие приборы серии Р-25. Приборы Р-25 предназначены для применения в САУ технологическими процессами. Они выполняют следующие функции: суммирование сигналов, поступающих с измерительных преобразователей с естественными электрическими выходными сигналами; введение информации о заданном значении величины; формирование и усиление сигнала рассогласования; формирование на выходе электрических импульсов постоянного или переменного тока для управления ИМ с постоянной скоростью перемещения; формирование совместно с ИМ постоянной скорости закона ПИ-регулирования; формирование совместно с дифференциатором и ИМ постоянной скорости закона ПИД-регулирования; ручное управление ИМ; преобразование сигнала от дифференциально-трансформаторного измерительного преобразователя положения ИМ в сигнал постоянного тока.
Модификации приборов, определяемые видом и номинальным диапазоном изменения входных сигналов, а также вид и количество подключаемых к приборам измерительных преобразователей приведены в таблице.
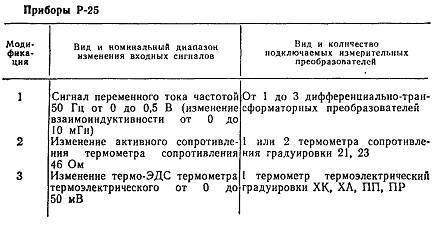
Приборы модификаций 2 и 3 имеют дополнительные входы для подключения унифицированных электрических сигналов 0...5 мА, 0...20 мА и 0...±10 В, используемых только для ввода корректирующих воздействий. В приборах модификации 3 предусмотрена компенсация температуры холодных спаев.
Приборы выпускаются с встроенным индикатором положения рабочего органа ИМ и без него. Питание—от однофазной сети переменного тока напряжением 220 В частотой 50±1 Гц, мощность, потребляемая от сети, не более 22 В*А, входное со противление для сигнала 0...5 мА—100 Ом; для сигнала 0…10 мА—25 Ом; для сигнала 0...10 В—15 кОм; выходные сигналы—импульсы напряжения постоянного пульсирующего тока среднего значения напряжения 24 В, изменение состояния бесконтактных ключей, допускающих коммутацию пульсирующего или переменного тока; выходные бесконтактные ключи приборов коммутируют переменный ток частотой 50 Гц и пульсирующий постоянный ток с амплитудным значением до 1 А при действующем значении тока от 0,1 до 0,5 А и напряжении внешнего источника питания выходных цепей не более 250 В. Вид и сопротивление нагрузки для выходного сигнала 24 В, подключаемой к внутреннему источнику,— активно-индуктивная при активном сопротивлении не менее 100 Ом.
Каждый прибор содержит два субблока: измерительный (Р-012 или Р-013) и регулирующий (Р-011), а также трансформатор питания (Т).
Прибор Р-25.1. Принципиальная схема прибора Р-25.1 показана на рисунке 11. 6.
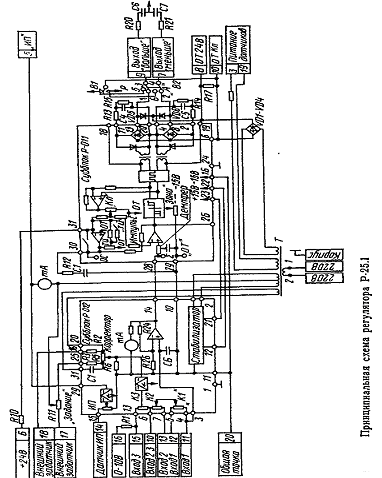
Рис. 11.6
Схема измерительного блока прибора Р-25.1 (рис. 11. 7) действует следующим образом. Первичные обмотки дифференциально-трансформаторных датчиков ДТ и датчика индикатора положения соединяются последовательно и подключаются к клеммам 3, 19 прибора. Резистор R18 служит для задания тока в первичных обмотках и уменьшения температурной погрешности датчиков. Номинальный ток 125 мА задается при подключении к прибору одного дифференциально-трансформаторного датчика. При подключении трех датчиков ток в первичных обмотках и, следовательно, крутизна преобразования датчиков уменьшаются примерно в 1,5 раза. Напряжения сигналов переменного тока со вторичных обмоток датчиков подаются на клеммы 11—12, 13—14, 14—15. Напряжения одного или нескольких сигналов при помощи потенциометрических делителей напряжения К1 (R21), К2 (RI7) и КЗ (R14), служащих для изменения коэффициентов передачи по каналу каждого датчика от 0 до 1, поступают в схему субблока Р-012. Вместо датчиков на те же входы могут подключаться сигналы постоянного тока 0...5 мА, 0...20 мА, а также сигнал 0...±10 В на специальный вход 14—16.
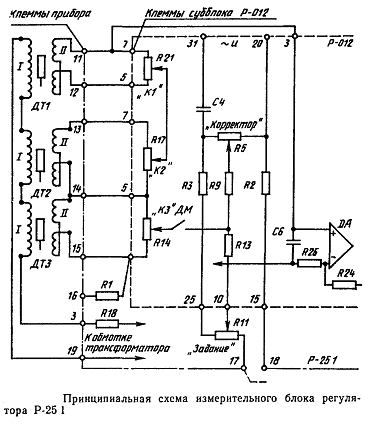
Рис. 11.7
Наряду с сигналами от датчиков в схему вводится сигнал от моста переменного тока, содержащего переменные резисторы «корректор» (R5), «задание» (R11), а также резисторы R2 и R3. Мост питается переменным напряжением от обмотки II трансформатора прибора через фазосдвигающую емкость С1, обеспечивающую сдвиг напряжения питания моста на угол, близкий к 45°, что соответствует сдвигу, вносимому датчиками. Часть выходного напряжения моста, определяемая резисторным делителем R9, R13, выделяется на резисторе R13 и суммируется последовательно с сигналами от датчиков, выделяющимися на потенциометрах R14, R17 и R21. В этой цепи, подключенной к общей точке и входу 3 операционного усилителя DA, последовательно включен фазочувствительный демодулятор ДМ, работающий в ключевом режиме (рис. 11.8).
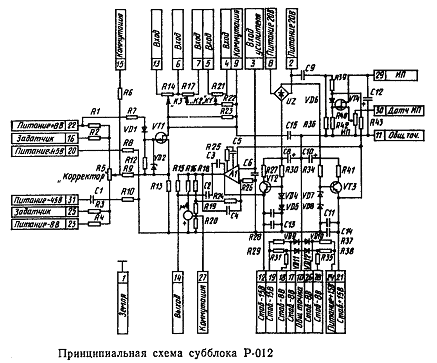
Рис. 11. 8
Статическая характеристика субблока Р-012 при работе в составе прибора Р-25.1 определяется уравнением
![]() ,
(11. 14)
,
(11. 14)
где ХВЫХ—выходной сигнал субблока; ХВХ1, ХВХ2, ХВХ3—входные сигналы; ХКОР—сигнал корректора; ХЗД—суммарный сигнал внутреннего и внешнего задатчика; K1, К2, К3—масштабные коэффициенты, изменяющиеся от 0 до 1. Регулирующий субблок Р-011 (рис. 11. 9) вместе с емкостью интегрирования (C1, C2) является функционально-законченным узлом приборов Р-25.
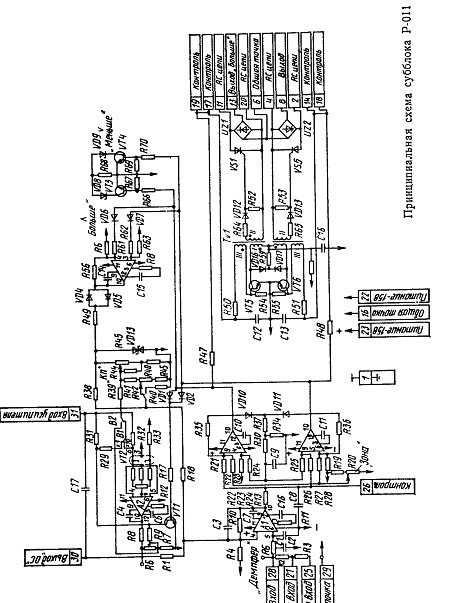
Рис. 11. 9
Основное
назначение субблока—формирование
закона регулирования. Его структурная
схема показана на рисунке 11.10. Основу
схемы составляет трехпозиционный
релейный элемент 1, охваченный ООС в
виде апериодического звена, выполненного
на операционном усилителе УОС. В сумматоре
![]() на входе трехпозиционного реле суммируется
входной сигнал, прошедший через демпфер,
с сигналами главной отрицательной и
дополнительной положительной ОС.
Отклонение суммарного сигнала за пределы
зоны нечувствительности трехпозиционного
реле приводит к включению одного из
каналов этого реле и тем самым вызывает
изменение сигнала ООС, возвращающее
схему в состояние равновесия.
на входе трехпозиционного реле суммируется
входной сигнал, прошедший через демпфер,
с сигналами главной отрицательной и
дополнительной положительной ОС.
Отклонение суммарного сигнала за пределы
зоны нечувствительности трехпозиционного
реле приводит к включению одного из
каналов этого реле и тем самым вызывает
изменение сигнала ООС, возвращающее
схему в состояние равновесия.
Дополнительная положительная связь подается на вход трехпозиционного реле с движка потенциометра «Импульс». Эта связь изменяет зону возврата релейного элемента так, что длительность включения в пульсирующем режиме определяется только положением движка потенциометра «Импульс». Длительность включений ТИМП в пульсирующем режиме, когда входной

Рис. 11. 10
сигнал субблока примерно равен сигналу ООС, определяется выражением
![]() ,
(11.15)
,
(11.15)
где γ—доля напряжения, подаваемого на вход УОС, поступающая в цепь дополнительной положительной ОС.
Передаточная функция регулирующего субблока совместно с ИМ постоянной скорости перемещения или другим интегратором выходных импульсов может быть записана в виде:
![]() ,
(11.16)
,
(11.16)
где ХВЫХ.ИМ—изменение положения ИМ (выхода интегратора), выраженное в относительных единицах; XВХ — изменение входного сигнала в относительных единицах; КП—коэффициент пропорциональности регулятора;
![]() ,
(11.17)
,
(11.17)
где
![]() —доля
выходного напряжения усилителя У,
поступающая на вход усилителя УОС и
определяемая положением движка
потенциометра «КП»
(коэффициент 0,3 определяется делителем
Rl, R4 в цепи ООС); ТИМ—время
полного хода ИМ;
—доля
выходного напряжения усилителя У,
поступающая на вход усилителя УОС и
определяемая положением движка
потенциометра «КП»
(коэффициент 0,3 определяется делителем
Rl, R4 в цепи ООС); ТИМ—время
полного хода ИМ;
![]() ,
(11.18)
,
(11.18)
где β — доля выходного напряжения усилителя УОС, подаваемая на его вход через резистор R и определяемая положением «ТИ» движка потенциометра.
Зависимость, связывающая выходную величину регулятора с входной в функции времени:
![]() .
(11.19)
.
(11.19)
Для скачкообразного возмущения ХВХ на входе предварительно сбалансированного субблока дает
![]() .
(11.20)
.
(11.20)
Прибор Р-25.2. Измерительная схема прибора (рис. 11. 11) действует следующим образом. Питание измерительных мостов термометров сопротивления осуществляется постоянным напряжением.
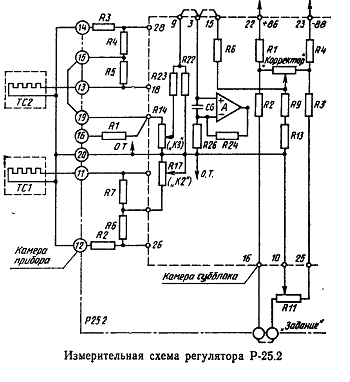
Рис. 11.11