

10.4. Системы управления регуляторов-стабилизаторов
В гл. 6,7 рассматривались различные типы регуляторов-стабилизаторов напряжения в цепях постоянного и переменного токов. Среди них в качестве наиболее перспективных были указаны устройства, выполненные на основе силовых полупроводниковых приборов. Поэтому в настоящем параграфе приводятся примеры СУ только полупроводниковых регуляторов-стабилизаторов.
Системы управления регуляторов-стабилизаторов переменного тока. Для регулирования напряжения в цепи переменного тока может быть применен компенсатор реактивной мощности, который используется для регулирования выходного напряжения
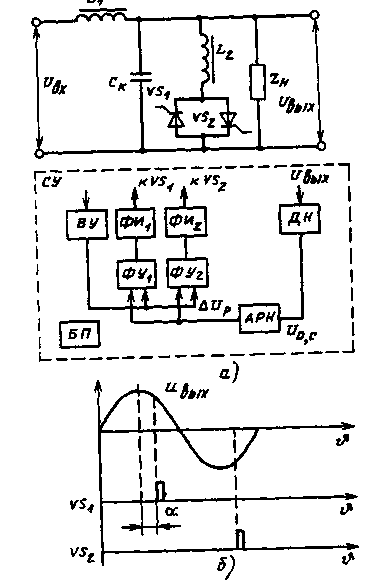
Рис 10. 8. Система управления регулятора-стабилизатора напряжения с компенсатором реактивной мощности: а—структурная схема; б—диаграммы выходного напряжения и управляющих импульсов
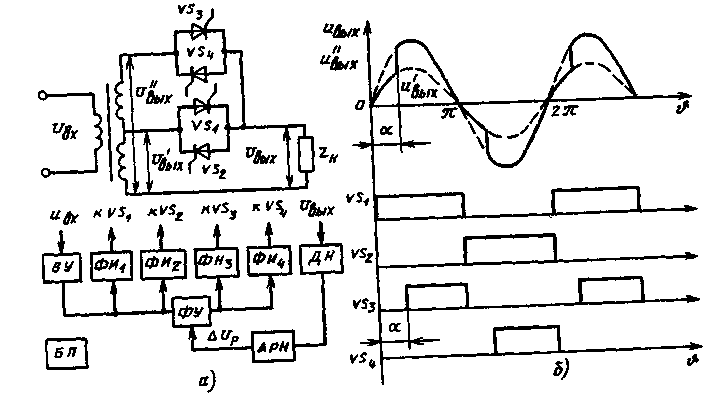
Рис. 10.9. Система управления регулятора-стабилизатора напряжения с тиристорным переключением отпаек: а—структурная схема; 6 — диаграммы выходного напряжения и управляющих импульсов
инвертора тока. Принцип регулирования напряжения в таком регуляторе-стабилизаторе основан на изменении его эквивалентной индуктивности. Для этого необходимо регулировать угол управления α. Вариант структурной схемы СУ такого регулятора-стабилизатора приведен на рис.10.8, а.
Управляющие импульсы тиристоров VS1 и VS2 формируются формирователями импульсов ФИ1 и ФИ2. Синхронизация этих импульсов с выходным напряжением ивых осуществляется входным устройством ВУ, сигналы с которого поступают на фазосдвигающие устройства ФУ1 и ФУ2. Одновременно на эти же устройства поступает сигнал ∆UP от автоматического регулятора напряжения АРН. Напряжение определяет фазу формирования управляющих импульсов относительно входного напряжения, т. е. угол управления α. Выходное напряжение uвых контролируется датчиком ДН, сигнал с которого по цепи обратной связи поступает на АРН. Диаграммы управляющих импульсов и выходного напряжения представлены на рис. 10.8, б.
Вариант структурной схемы СУ регулятора-стабилизатора, выполненного на принципе коммутации тиристорами отводов от обмотки трансформатора, приведен на рис. 10.9, а. Регулирование напряжения в схеме производится посредством изменения угла α, определяющего момент переключения нагрузки с отвода, соответствующего напряжению U`вых, на отвод с более высоким напряжением U``вых (рис. 10.9, б).
Управляющие импульсы на тиристоры VS1 — VS2 поступают с выходов формирователей импульсов ФИХ— ФИ4. Синхронизация управляющих импульсов производится входным устройством ВУ. При этом моменты формирования управляющих импульсов тиристоров VSX и VS2 жестко связаны с напряжением uвх и соответствуют прохождению его через нулевые значения (0, π, 2π ...). В то же время управляющие импульсы тиристоров VS5 и VS4 сдвигаются фазосдвигающим устройством ФУ на угол α относительно этих моментов. Для того чтобы обеспечить надежную работу схемы при активно-индуктивной нагрузке, необходимо, чтобы длительность импульсов соответствовала, диаграммам, представленным на рис. 10.9. Изменение угла α производится автоматически сигналом ∆UP, поступающим от АРН.
Системы управления регуляторов-стабилизаторов постоянного тока. Регуляторы-стабилизаторы малой мощности преимущественно выполняются на транзисторах, работающих в режиме непрерывно регулируемого сопротивления. Согласно этому принципу структурную схему СУ в общем случае можно представить в виде, показанном на рис. 10.10. Процесс регулирования протекает следующим образом. Сигнал

Рис. 10.10. Система управления регулятора-стабилизатора постоянного тока непрерывного действия
в цепи обратной связи, поступающей с датчика выходного напряжения ДН, подается на сумматор 1. На его другой вход поступает опорное напряжение U0 от источника опорного напряжения ИОН. Разность этих напряжений ε подается на вход усилителя, содержащего необходимые корректирующие цепочки для придания устойчивости процессу регулирования, сигнал ∆Up с выхода усилителя подается на транзистор (или совокупность последовательно-параллельно соединенных транзисторов), выполняющий функции исполнительного органа в системе регулирования. По принципу регулирования данная система является статической системой с отрицательной обратной связью, отрабатывающей до минимума при различных возмущениях разность напряжений е, зависящую от коэффициента усиления цепи регулирования. Последний преимущественно определяется коэффициентом усиления усилителя СУ.
При повышении мощности регулятора-стабилизатора более рациональным является способ импульсного управления исполнительным органом схемы. Структурная схема СУ для импульсного управления, например, транзистором VT (см. рис. 10.11, а) (или совокупность транзисторов) представлена на рис. 10.11, а. Включение транзистора производится подачей на него управляющего импульса от ФИ. Момент формирования переднего фронта управляющего импульса совпадает с моментом равенства сигнала UT, поступающего от генератора пилообразного напряжения ГПН и напряжения ∆UP. Длительность управляющего импульса соответствует интервалу времени, когда напряжение превышает сигнал ∆UP. Подобная структура СУ позволяет реализовать peгулирование выходного напряжения ивых по способу ШИМ. частота переключения транзистора VT в данном случае постоянна и определяется частотой ГПН. Регулирование выходного напряжения происходит за счет изменения скважности управляющих импульсов, которая определяется сигналом AUP усилителя.
Если в качестве исполнительного органа регулятора используются тиристоры, то структурная схема СУ, соответствующая регулированию по способу ШИМ подобна приведенной на рис. 10.11, а. Основное отличие ее заключается в дополнительных каналах формирования управляющих импульсов вспомогательных (коммутирующих) тиристоров. Это обусловлено необходимостью принудительного выключения основных тиристоров.
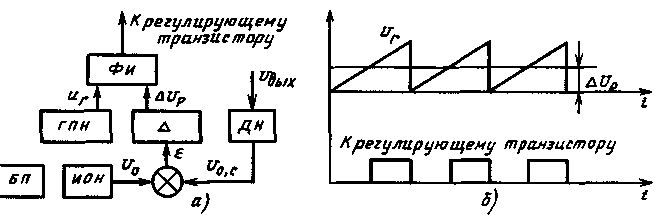
Рис. 10.11. Система управления регулятора постоянного тока: а—структурная схема, б—диаграммы напряжений на элементах схемы и управляющих импульсов