

Гидравлика. учебное пособие. Ткаченко Ю.С
.pdfраспределение же скоростей только от числа R, поскольку оно определяется уравнениями, в которые теплопроводность не входит вовсе. Два конвекционных потока подобны, если их числа Рейнольдса и Прандтля одинаковы.
Теплопередачу между твердыми телами и жидкостью характеризуют обычно так называемым коэффициентом теплопередачи α, определяемым как отношение
q T1 T0
где q – плотность потока тепла через поверхность тела, а Т1 – Т0 – характерная разность температур твердого тела и жидкости. Если распределение температуры в жидкости известно, то коэффициент теплопередачи легко определить, вычисляя плотность потока тепла q дТ /дпна границе жидкости (производная берется по нормали к поверхности тела).
Коэффициент теплопередачи является размерной величиной. В качестве безразмерной величины, характеризующей теплопередачу, пользуются числом Нуссельта
N l /
Из соображений подобия следует, что для каждого данного типа конвекционного движения число Нуссельта является определенной функцией только от чисел Рейнольдса и Прандтля:
N f (R,P)
Эта функция приобретает тривиальный вид при конвекции с достаточно малым числом Рейнольдса. Малым R соответствуют малые скорости движения. Поэтому в первом приближении в уравнении можно пренебречь членом, содержащим скорость, так что распределение температуры определяется уравнением T 0, т.е. обычным уравнением стационарной теплопроводности в неподвижной среде. Коэффициент теплопередачи не может, очевидно, зависеть теперь ни от скорости, ни от вязкости жидкости и поэтому
N const
120
причем при вычислении этой постоянной можно рассматривать жидкость как неподвижную.
11.ГИДРОПРИВОДЫ МРС И ОМД
11.1.Следящий гидропривод МРС
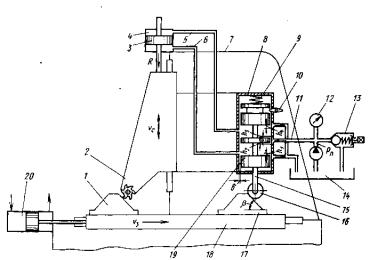
Принцип действия гидравлического следящего привода с копировальным управлением. Схема гидравлического следящего привода представлена на рис. 30. Привод показан при использовании его на фрезерном станке для получения на заготовке 1 фасонного профиля шаблона 17. Насос подает масло по трубопроводу 11 в среднее окно корпуса 8 управляющего золотника 19, положение которого определяется циркуляцией масла через щели h1, h2, h3 и, образованные кромками шеек золотника 19 и окон корпуса 8. Силовой цилиндр 4 следящего привода закреплен на неподвижной стойке 7 станка. Шток поршня 3 соединен с вертикальной кареткой 2, несущей корпус управляющего золотника и режущий инструмент. Давление в гидросистеме устанавливается переливным клапаном 13 и контролируется манометром 12. Один конец золотника имеет рычаг 15, несущий щуп 16, другой находится под действием пружины 9. Когда щуп отведен от шаблона 17, пружина 9 перемещает золотник 19 в крайнее нижнее положение по схеме. При этом положении золотника проходное сечение щели h2 значительно меньше, чем щели h3, а проходное сечение щели h1 больше щели h4. В результате этого поток масла, поступающий в нижнюю полость золотника, дросселируется (т.е. давление падает) больше, чем поток масла, поступающий в верхнюю полость золотника, а поток масла, поступающий в резервуар 14 из этой полости, дросселируется больше, чем поток масла, поступающий из нижней полости золотника.
Таким образом, в нижней полости золотника и трубопроводе 6 устанавливается низкое давление, а в верхних полостях золотника и цилиндра и трубопроводе 5 – высокое. Вследствие этого поршень и шток вместе с вертикальной кареткой 2, управляющим золотником и режущим инструментом переме-
121
щаются вниз. В процессе перемещения щуп 16 упрется в шаблон 17, но каретка будет еще некоторое время двигаться под действием вертикальной подачи. При этом проходные сечения щелей h1 и h3 будут постепенно уменьшаться, а щелей h2 и h4 увеличиваться, после чего наступит момент, когда проходные сечения всех щелей сравняются настолько, что разность давлений в полостях золотника и гидроцилиндра окажется недостаточной для продолжения движения поршня гидроцилиндра, и вертикальная подача прекратится.
Рис. 30. Схема гидравлического следящего привода с копировальным управлением
Если столу 18 сообщить от гидроцилиндра 20 постоянную скорость vз, то шаблон, при повышающемся профиле, будет перемещать щуп и золотник через среднее положение вверх до тех пор, пока проходные сечения щелей h2 и h4 не увеличатся, а щелей h1 и h3 не уменьшатся настолько, что разница давлений в полостях гидроцилиндра станет достаточной для преодоления силы сопротивления движению. Это перемещение, совершаемое по команде управляющего золотника, немедленно передается ему же с помощью обратной связи, осуществленной в данном случае закреплением корпуса управля-
122
ющего золотника непосредственно на вертикальной каретке. Обратная связь ослабляет командный сигнал золотника, снижая его до нуля при среднем положении золотника.
При понижении профиля шаблона щуп и золотник под действием пружины 9 будут перемещаться вниз от среднего положения до тех пор, пока проходные сечения щелей не увеличатся, а щелей h2 и h4 не уменьшатся настолько, что в полостях гидроцилиндра разница давлений станет достаточной для преодоления сопротивления движению, и тогда вертикальная каретка начнет перемещаться вниз. Таким образом, совокупность продольной скорости vз шаблона и заготовки и вертикальной скорости (скорость слежения) щупа и режущего инструмента обеспечивает воспроизведение профиля шаблона на заготовке. При этом щуп, обкатывая контур шаблона, находится с ним в постоянном контакте.
Для ручного управления отводом вверх фрезы от заготовки и щупа от шаблона служит рукоятка 10.
11.2.Погрешность воспроизведения, нечувствительность
иустойчивость привода
Из принципа действия схемы, показанной на рис. 30, следует, что чем круче подъем профиля шаблона, определяемый углом β между касательной к профилю шаблона в данной точке и направлением скорости задания, и больше скорость задания, тем больше вертикальная скорость слежения и, следовательно, тем больший поток масла будет направляться золотником, например, в верхнюю полость гидроцилиндра и отводиться из нижней полости в резервуар, а значит, тем большими должны быть разность проходных сечений щелей h2, h3 и h4, h1, а также величина смещения золотника от нейтрального положения. Таким образом, силовой гидроцилиндр следящего привода приходит в движение только тогда, когда управляющий золотник выходит из нейтрального положения, в результате чего возникает погрешность воспроизведения (копирования).
123
Величина погрешности воспроизведения зависит от расстояния, на которое должен сместиться золотник от нейтрального положения, для того чтобы создались необходимая разность давлений в полостях гидроцилиндра и необходимая скорость его перемещения, так как в процессе обработки на такое же расстояние смещаются друг относительно друга щуп и режущий инструмент, что вызывает отличие профиля обработанной поверхности от контура шаблона. Следовательно, чем больше скорость слежения vc и нагрузка R на двигателе, тем больше величина погрешности следящего привода, а значит и погрешность копирования, кроме того, сила сухого трения в исполнительном органе изменяется в зависимости от величины и знака скорости слежения, что обусловливает образование зоны нечувствительности следящего привода, существенно влияющей на качество (огранку, ступенчатость) копируемой поверхности.
Влияние погрешности воспроизведения следящего привода и его нечувствительности на точность копирования дано на рис. 31. Сплошной линией показан контур шаблона 2, штриховой линией – контур детали 1, наложенный на контур шаблона. Величина vc R характеризует погрешность копиро-
вания, обусловленную погрешностью воспроизведения следящего привода, связанную с величиной скорости слежения vс и нагрузки R; величина t
т - погрешность копирования, обусловленная нечувствительностью следящего привода в результате силы сухого трения.
Таким образом, в результате погрешности следящего привода, пропорциональной величине скорости слежения, контур детали получается как бы сдвинутым относительно контура шаблона в направлении, обратном направлению скорости v3. Правильный выбор следящего привода заключается в том, чтобы при заданных режимах работы станка ограничить погрешность воспроизведения и нечувствительность привода требуемыми пределами.
124
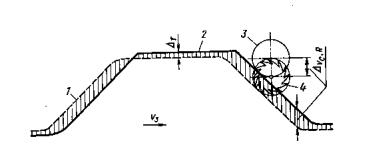
Рис. 31. Отличие профиля изделия от профиля шаблона
врезультате погрешности воспроизведения следящего привода
иего нечувствительности
Вописанной выше работе гидравлического следящего привода не учитывалась инерция подвижных элементов привода, например вертикальной каретки, а также упругость передающих движение звеньев, например масла в гидросистеме привода. Однако силы инерции и упругость существенно влияют на движение привода в процессе восстановления равновесия и обусловливают возможность возникновения колебаний относительно положения равновесия. Рассмотрим работу следящего привода, учитывая влияние упругости и сил инерции.
Как уже указывалось, при автоматической вертикальной подаче на шаблон наступает такой момент, когда щуп упирается в шаблон и управляющий золотник занимает нейтральное положение. При этом положении золотника проходные сечения щелей h2, h3, и h1, h4, а также давление в полостях гидроцилиндра уравниваются и движение вертикальной каретки должно было бы прекратиться (см. рис.30). Однако вследствие инерции масс и упругости масла в гидроцилиндре вертикальная каретка может продолжать опускаться, несмотря на то, что давление в нижней полости будет возрастать, а в верхней полости уменьшаться.
Движение вертикальной каретки прекратится, когда золотник сместится выше нейтрального положения. В результате смещения золотника выше нейтрального положения давление
125
в трубопроводе 6 и нижней полости гидроцилиндра увеличится, а в трубопроводе 5 и верхней полости уменьшится, вследствие чего к поршню гидроцилиндра будет приложена сила, направленная вверх, которая заставит поршень и шток вместе с вертикальными салазками и корпусом копировального прибора перемещаться вверх. При этом управляющий золотник вновь подойдет к нейтральному положению, однако вследствие упругости масла в гидроцилиндре и инерции перемещаемых масс вертикальная каретка будет продолжать движение вверх и золотник расположится ниже нейтрального положения. В этом случае давление в верхней полости гидроцилиндра возрастет, а в нижней полости уменьшится, и к поршню гидроцилиндра будет приложена сила, направленная вниз, которая заставит поршень и соединенные с ним узлы перемещаться вниз. Управляющий золотник опять подойдет к нейтральному положению, а затем расположится выше его, вследствие упругости масла и инерции массы вертикальной каретки. Вновь к поршню гидроцилиндра будет приложена сила, направленная вверх, которая заставит поршень и соединенные с ним узлы перемещаться вверх и т.д.
11.3. Структурная схема следящего гидропривода
Изложенное позволяет изобразить структурную схему рассмотренного следящего привода в форме, показанной на рис. 32, и сформулировать следующие понятия, относящиеся к его работе.
Источник воздействия ИВ, приводящий в действие программу, сообщаемую следящему приводу для воспроизведения (рис. 30 – механизм образования скорости задания – продольной подачи).
Задающее устройство ЗУ содержит программу (рис. 30 – шаблон 17), сообщаемую следящему приводу для воспроизведения.
Сравнивающее (чувствительное) устройство СУ, воспринимающее программу от задающего устройства, сопоставля-
126

ющее ее с программой, воспроизведенной приводом, и выдающее сигналы рассогласования между ними (управляющий золотник 19, рис. 30).
Рис. 32. Структурная схема гидравлического следящего привода с копировальным управлением
Гидродвигатель (гидроцилиндр или гидромотор) Д, получающий команды от сравнивающего устройства и развивающий необходимую скорость слежения.
Рабочий орган РО – сборочная единица (узел) машины или оборудования, которому от гидродвигателя передаются движения, воспроизводящие программу, вводимую задающим устройством (рис. 30, каретка 2 с инструментом).
Обратная связь по отработке ОС- цепь управления, связывающая рабочий орган со сравнивающим устройством (выход привода со входом) и служащая для измерения результата действия следящего привода. Обратная связь по отработке превращает следящий привод в замкнутый (на рис. 30 привод имеет жесткую механическую обратную связь, образованную закреплением корпуса золотника на рабочем органе).
Источник питания – насосная установка или другое устройство, подающие жидкость (масло) под давлением.
Кроме того, на основе схем рис. 30 и 32 можно выделить следующие основные понятия, относящиеся к следящему приводу.
Входная величина или «вход» (управляющий входной сигнал) Х – величина воздействия (перемещения, скорости), сообщаемого сравнивающему устройству от задающего.
127
Выходная величина - величина действия (перемещения, скорости) развиваемого рабочим органом.
Прямая цепь воздействия – цепь управления от источника воздействия до рабочего органа.
Следящий привод – автоматический привод, в котором выходная величина воспроизводит изменение входной величины Х, причем привод реагирует на рассогласование Х1 между входной и выходной величинами.
Скорость слежения (следящая подача) – скорость рабочего органа, автоматически управляемая сравнивающим устройством по величине и знаку (в приводе, показанном на рис.1, под скоростью слежения понимается скорость вертикального перемещения).
Скорость задания (задающая подача) – постоянная или регулируемая по величине скорость, сообщаемая от источника воздействия задающему устройству.
Скорость воспроизведения (копирования) – суммарная скорость (скорость вдоль контура копира), представляющая геометрическую сумму скоростей слежения и задания.
Погрешность воспроизведения (рассогласование) – расхождение положений рабочего органа и щупа следящего привода в процессе отработки программы, поступающей от задающего устройства.
Зона нечувствительности – наименьшая величина смещения щупа золотникового механизма, необходимая для осуществления реверсирования рабочего органа привода при возможно меньшей скорости слежения.
Устойчивый следящий привод – следящий привод, который после приложения, а затем снятия управляющего или внешнего возмущающего воздействия возвращается с течением времени в положение равновесия.
Неустойчивый следящий привод – следящий привод, который после приложения, а затем снятия управляющего или внешнего возмущающего воздействия не возвращается с течением времени в положение равновесия, а совершает вокруг него незатухающие колебания, называемые автоколебаниями.
128
Применительно к золотниковому механизму устанавливается следующая терминология.
Подведенное давление (давление питания, давление на входе) – давление рабочей жидкости, подводимой к золотнику, под которым, если это специально не оговорено, подразумевается разность давлений в нагнетательном и сливной магистралях золотника (в приводе, показанном на рис. 30, это давление обозначено рп).
Внешняя цепь золотника – гидравлическая цепь, включающая магистрали, идущие от золотника к управляемому им гидродвигателю, и полости гидродвигателя (на рис. 30 внешняя цепь золотника состоит из магистрали 5, гидродвигателя 4 и магистрали 6).
Рабочее окно (щель, проходное сечение) золотника – пространство, образованное кромками шеек золотника и окон в корпусе золотникового механизма, в котором осуществляется дросселирование потока проходящей жидкости, обеспечивающее процесс управления гидродвигателем (золотники различаются по количеству рабочих окон, например, могут быть четырехдвух- и однощелевые (кромочные) золотники).
Открытие окна или открытие щели (проходного сечения) золотника – ширина рабочего окна (щели), равная расстоянию между кромками шеек золотника и окон в корпусе, замеренному параллельно оси золотника (на рис. 30 размеры h1 – h4).
Начальное открытие окна (щели, проходного сечения), открытие в среднем положении – размер открытия рабочего окна золотника в среднем (нейтральном) положении.
Радиальный зазор δ (рис. 30) – половина разности диаметров золотника и цилиндрической поверхности корпуса.
Перекрытие окна (щели, проходного сечения) золотника
– величина захода кромки шейки золотника за кромку окна в корпусе, измеренная параллельно оси золотника, при котором окно переходит в радиальный зазор.
Длина рабочего окна (щели, проходного сечения) прямоугольной формы – размер его, замеренный по внутренней ци-
129