

Учебное пособие 1259
.pdfРассмотрим произвольную точку тела. Траекторией ее является окружность, радиус которой равен кратчайшему расстоянию от данной точки до оси вращения тела. Вектор линейной скорости точки определяется векторным произведением
,
где – радиус-вектор точки. Из формулы следует, что модуль скорости
Результат векторного произведения направлен перпендикулярно плоскости, в которой лежат сомножители векторного произведения, в ту сторону, откуда поворот первого сомножителя ко второму видится происходящим про-
тив часовой стрелки. Следовательно, направление соответствует касательной к траектории в сторону движения.
Полное ускорение точки складывается из касательной и нормальной
составляющих |
, его модуль |
√ |
|
. |
|||
Касательное и нормальное ускорения определяются векторными про- |
|||||||
изведениями |
|
|
|
|
|
|
|
|
|
|
; |
|
, |
||
модули этих ускорений |
|
|
|
|
|
|
|
|
; |
|
|
|
. |
||
|
|
√ |
|
|
|
||
Модуль полного ускорения |
|
|
. Таким образом, скорости и |
||||
ускорения точек вращающегося тела линейно зависят от их расстояний до оси вращения.
Вектор совпадает направлением с вектором , если вращение уско-
ренное или противоположен , если вращение замедленное. Вектор всегда направлен к оси вращения.
Движение плоской фигуры в ее плоскости в каждый момент времени можно рассматривать состоящим из поступательного движения плоской фигуры вместе с произвольной точкой (например, А), принятой за полюс, и вращательного движения вокруг этого полюса.
Обычно за полюс принимают такую точку А тела, движение которой известно. Тогда скорость любой другой точки B тела определяется согласно
закону сложения скоростей |
|
|
|
|
, |
где – скорость точки А, принятой за полюс, – вращательная скорость точки В вокруг оси, проходящей через полюс А.
Вектор вращательной скорости направлен перпендикулярно отрез-
ку АВ, соединяющему данную точку В с полюсом А, в сторону вращения. Вектор вращательной скорости равен , его модуль .
Здесь – мгновенная угловая скорость плоской фигуры.
Аналогично определяется ускорение точки B плоской фигуры. Соглас-
но закону сложения ускорений |
|
|
|
|
, |
|
11 |
|

где – ускорение точки А, принятой за плюс, |
|
– ускорение точки В при |
||||
вращении вокруг плюса А. |
|
|
|
|
|
|
В свою очередь, ускорение |
слагается из касательной и нормальной |
|||||
составляющих |
|
|
|
|
|
|
|
|
, тогда |
|
|
, |
|
здесь – касательная составляющая вращательного движения |
||||||
|
|
|
, |
|
|
; |
– нормальная составляющая вращательного движения
, .
Плоское движение тела в кинематике можно представить как череду вращательных движений тела вокруг мгновенных центров. Если тело движется не поступательно, то в каждый момент времени такой центр можно найти.
Мгновенным центром скоростей называется точка , принадлежащая движущемуся телу, скорость которой в данный момент времени равна нулю
.
Если такая точка определена, то скорости остальных точек тела в данный момент времени определяются, как вращательные скорости вокруг оси,
проходящей через мгновенный центр. Примем |
за полюс плоского движения |
||||
тела, тогда |
|
|
|
|
|
|
|
|
|
; |
. |
|
|
|
; |
|
. |
Скорости всех точек тела перпендикулярны отрезкам, соединяющим их с мгновенным центром скоростей, пропорциональны этим отрезкам и направлены в сторону вращения тела.
Рассмотрим некоторые случаи определения мгновенного центра скоро-
стей.
1 Если известны линии действия векторов скоростей двух точек, принадлежащих телу, то мгновенный центр скоростей находится на пересечении перпендикуляров, восстановленных к скоростям этих точек (рис.
2.6а).
Рис. 2.6а |
Рис. 2.6б |
Рис. 2.7 |
2.Если перпендикуляры, восстановленные к скоростям двух точек,
параллельны, то центр |
расположен в бесконечности и тело совершает |
12

мгновенно поступательное движение ( |
), скорости всех точек тела гео- |
метрически равны. |
|
3.Если перпендикуляры, восстановленные к скоростям двух точек,
совпадают, то центр расположен на пересечение перпендикуляра с другой прямой линией, которая соединяет концы векторов скоростей (рис. 2.6б).
4. Если тело катится без скольжения по неподвижной плоскости или поверхности. В этом случае мгновенный центр скоростей находится в точке касания телом неподвижной плоскости или поверхности (рис. 2.7).
2.4. Задача К2. Исследование движения плоского механизма
Плоский механизм состоит из стержней 1, 2, 3, 4 и катка с центром в точке С, соединенных между собой шарнирами. На рис. К2.3 и К2.8 стержень 3 шарнирно соединен с ползунами В и Е. На рис. К2.3–К2.8 шарнир D находится в середине соответствующего стержня.
Длины стержней равны |
соответственно: |
. Радиус катка |
. |
Рис. К2.0 |
Рис. К2.1 |
Рис. К2.2 |
Рис. К2.3 |
13

Рис. К2.4 |
Рис. К2.5 |
Рис. К2.6 |
Рис. К2.7 |
Рис. К2.8 |
Рис. К2.9 |
|
14 |
Положение механизма определяется углами (рис. К2.0– К2.9), значения углов указаны в табл. К2. Здесь же заданы скорости (ско-
рость 1звена |
или центра катка |
), которые являются постоянными. Задан- |
|||||||||
ную угловую скорость |
|
считать направленной против хода часовой стрелки, |
|||||||||
а заданную скорость |
– вправо. |
|
|
|
|
|
|||||
|
|
Определить линейные скорости |
тех точек механизма и угловые скоро- |
||||||||
сти |
тех его звеньев, которые указаны в столбце «Найти» табл. К2. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
Таблица К2 |
|
№ |
|
|
Углы, град |
|
Заданные скорости |
Найти |
|||||
усло- |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, с-1 |
|
|
зве- |
|
вия |
|
|
|
|
|
|
|
, м/с |
|
||
|
|
|
|
|
|
|
точек |
ньев |
|||
|
|
|
|
|
|
|
|
|
|
||
0 |
|
30 |
120 |
|
30 |
|
60 |
– |
4 |
В, А |
2 и 3 |
1 |
|
0 |
120 |
|
90 |
|
120 |
2 |
– |
С, В |
2 и 4 |
2 |
|
60 |
60 |
|
60 |
|
120 |
– |
6 |
В, А |
2 и 3 |
3 |
|
0 |
150 |
|
30 |
|
60 |
3 |
– |
С, В |
2 и 4 |
4 |
|
30 |
120 |
|
120 |
|
60 |
– |
8 |
В, А |
2 и 3 |
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
90 |
120 |
|
90 |
|
60 |
4 |
– |
С, В |
2 и 4 |
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
0 |
120 |
|
90 |
|
120 |
– |
2 |
В, А |
2 и 3 |
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
30 |
120 |
|
30 |
|
60 |
5 |
– |
С, В |
2 и 4 |
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
90 |
120 |
|
90 |
|
60 |
– |
5 |
В, А |
2 и 3 |
|
|
|
|
|
|
|
|
|
|
|
|
Указания
Решение задачи определяется геометрией чертежа механизма. Построение чертежа следует начинать с 1стержня, направление которого определяется углом . Дуговыми стрелками на схемах показано, как откладывать остальные углы механизма. Длины звеньев механизма следует выполнять в масштабе.
Для определения характера движения звеньев механизма и определения направлений скоростей его шарниров необходимо выполнить кинематический анализ механизма.
Для определения скоростей точек звена и его угловой скорости рекомендуется использовать теорему о проекциях скоростей. Также плоское движение звена механизма можно представить как более простое вращательное движение вокруг мгновенного центра скоростей.
Пример решения задачи К2
Механизм состоит из трех звеньев, ползуна и катка С, соединенных друг с другом и с неподвижной опорой Е шарнирами (рис. К2).
Дано:
.
15

Определить: скорости точек A и D механизма ( , ), а также угловые
скорости 1 и 2 звеньев ( |
). |
|
Решение |
Сделаем чертеж механизма в соответствии с данными задачи (рис. К2). Выполним кинематический анализ механизма.
1.Каток совершает плоское движение. В качестве заданной скорости
имеем скорость центра катка , которую направим параллельно поверхности качения, вправо.
2. Стержень BD имеет неподвижную шарнирную опору в точке Е, поэтому совершает вращательное движение вокруг оси, проходящей через эту
точку. Скорости концов стержня и направлены перпендикулярно стержню.
3. Стержни CD и AB совершают плоское движение, конец А звена AB соединен с ползуном и может совершать только вертикальное движение. Ско-
рость направим вверх.
Рассмотрим стержень CD. Скорости и его концов направлены под углами 30о к оси стержня, что видно из чертежа механизма. Определим значение скорости , используя теорему о проекциях скоростей
, м/c.
|
|
|
|
Рис. К2 |
|
||||
Рассмотрим стержень |
. Угловую скорость стержня определим по |
||||||||
формуле |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
||||
Конец стержня B расположен на расстоянии |
от оси враще- |
||||||||
ния , поэтому скорость этой точки |
|
||||||||
|
|
|
|
|
|
|
|
⁄ . |
|
Рассмотрим стержень AB. Скорость точки B направлена под углом |
|||||||||
30о к оси стержня, а скорость |
его конца A составляет угол |
. Воспользу- |
|||||||
емся теоремой о проекциях скоростей |
|
||||||||
|
|
16 |
|
|
|
|
|||
|
|
|
|
|
||
, |
|
|
√ |
|
⁄ |
⁄ |
⁄
Угловую скорость определим с помощью мгновенного центра скоростей (P), который находится на пересечении перпендикуляров, проведенных
к векторам и из точек А и В соответственно. Стержень AB вращается вокруг мгновенного центра Р, тогда скорость точки В определяется по формуле
, .
Вычислим расстояние ВР. Треугольник АРВ – равнобедренный с углами при основании 30о, тогда , а величина угловой скорости стержня АВ составит
|
|
|
. |
|
Ответ: |
⁄ ; |
⁄ ; |
; |
. |
2.5. Задача К3. Сложное движение материальной точки |
||||
Пластина вращается вокруг неподвижной оси по закону |
, за- |
|||
данному в табл. К3. Положительное направление отсчета угла |
показано на |
|||
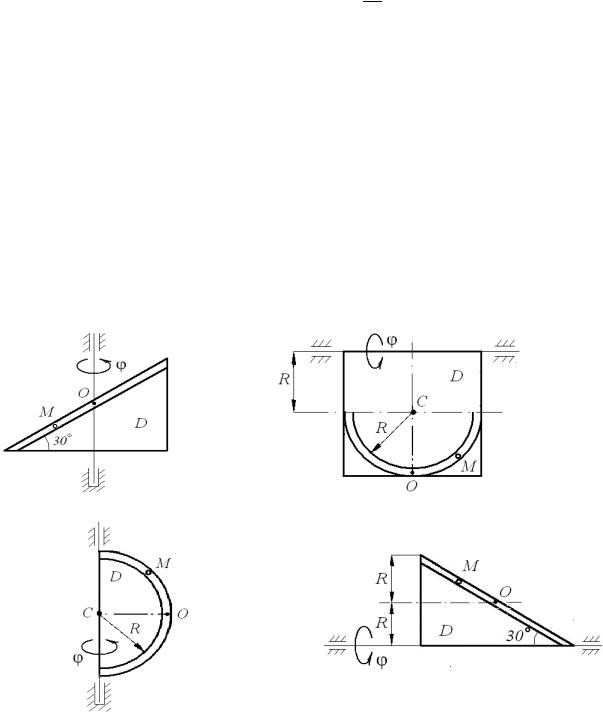
рисунках дуговой стрелкой (рис. К3.0–К3.9).
На рис К3.7, К3.8, К3.9 ось вращения пластины проходит через точку перпендикулярно плоскости чертежа. На рис. К3.0, К3.2, К3.4, К3.5 ось
вращения пластины вертикальна, а на рис. К3.1, К3.3, К3.6 – горизонтальна.
Рис. К3.0 |
Рис. К3.1 |
Рис. К3.2 |
Рис. К3.3 |
17

Рис. К3.4 |
Рис. К3.5 |
Рис. К3.6 |
Рис. К3.7 |
Рис. К3.8 |
Рис. К3.9 |
|
По пластине движется точка М согласно закону |
, ука- |
|
занному в табл. К3. На всех рисунках показано положительное смещение точ-
ки М ( |
). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица К3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номер |
Закон движения |
Размер |
Закон движения точки |
|
||||||
|
|
пластины |
|
|||||||||
|
условия |
R, м |
|
|
|
|
|
|
, м |
|
||
|
, рад |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
– |
1,2 |
|
|
|
|
|
|
– |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
– |
1,6 |
|
|
|
|
|
|
– |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
– |
1,0 |
|
|
|
|
|
|
– |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
18 |
|
|
|
|
|
|
|
|
|
3 |
– |
1,6 |
|
|
|
|
|
|
– |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
– |
0,8 |
|
|
|
|
|
|
– |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
– |
2,0 |
|
|
|
|
|
|
– |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
– |
1,2 |
|
|
|
|
|
|
– |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
– |
0,8 |
|
|
|
|
|
|
– |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
– |
1,0 |
|
|
|
|
|
|
– |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
– |
2,0 |
|
|
|
|
|
|
– |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
||||||
|
Найти абсолютную скорость и абсолютное ускорение точки М в мо- |
||||||||||
мент времени |
. |
|
|
|
|
|
|
|
|
|
|
Указания к решению задачи
При решении задачи К3 необходимо воспользоваться теоремами о сложении скоростей и о сложении ускорений. Движение точки по пластине следует считать относительным, вращательное движение самой пластины – переносным.
Кинематические характеристики относительного и переносного движений точки зависят от ее положения на пластине в заданный момент времени. Поэтому в первую очередь следует определить, где в момент времени находится точка М на относительной траектории и изобразить ее на чертеже. Если точка М движется по дуге радиуса R, то положение точки М удобно определять углом ОСМ.
Пример решения задачи К3.
Пластина (рис. К3) вращается вокруг горизонтальной оси по закону
. Положительное направление отсчета угла показано на рис. К3 дуговой стрелкой. По дуге АОД движется точка М согласно закону
; положительное направление движения ОМД.
Дано: |
; |
; |
|
( – в радианах, – в метрах, |
|
||||
– в секундах). |
|
|
|
|
Определить: абсолютную скорость |
и абсолютное ускорение точки |
|||
М в момент времени |
|
. |
|
|
Решение.
Точка М совершает сложное движение. При этом ее движение по дуге окружности на пластине является относительным, а движение вместе с пластиной – переносным.
19

Рассмотрим относительное движение точки. Это движение происходит по закону
|
|
|
|
|
|
|
|
|
(1) |
|
|
|
|
|
|
|
|
|
|
Определим положение точки М на пластине в момент времени |
. |
||||||||
Для этого подставим в уравнение (1) заданное время и получим |
|
|
. Тогда |
||||||
|
|||||||||
угловое перемещение точки М равно |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Рис. К3 |
|
|
|
|
|
|
|
|
|||
Угол |
определяет направление относительной скорости |
, относи- |
|||||||||||||||||||||
тельных ускорений и . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Значения скорости и ускорения относительного движения определим |
|||||||||||||||||||||||
дифференцированием: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
; |
|
|
|
|
|
; |
|
|
|
|
|
|
. |
(2) |
||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Здесь |
|
|
|
– радиус кривизны траектории |
относительного движе- |
||||||||||||||||||
ния точки. Для момента времени |
|
|
|
получим |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
м/с; |
|
|
|
|
; |
|
|
. |
|
(3) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Положительные значения |
и |
|
|
|
свидетельствуют о том, что векторы |
||||||||||||||||||
направлены по касательной в сторону положительного отсчета пути. Нор-
мальное ускорение |
направлено к центру кривизны траектории относитель- |
||||||
ного движения. Изобразим эти векторы на чертеже (рис. К3). |
|||||||
Рассмотрим переносное движение пластины вместе с точкой М. Дви- |
|||||||
жение пластины (вращение) происходит по закону |
. Найдем угловую |
||||||
скорость и угловое ускорение переносного вращения: |
|
||||||
|
|
|
|
|
|
|
. |
В заданный момент времени |
|
они составят |
|||||
|
|
||||||
|
|
|
|
. |
|
(4) |
|
Положительные значения |
и |
указывают на то, что их направ- |
|||||
ления совпадают с направлением вращения пластины (см. рис. К3), а векторы направлены вдоль оси вращения вправо (правило правого винта).
20