

Кинематика. методические указания к организации самостоятельной работы по дисциплине «Теоретическая механика». Зульфикарова Т.В
.pdfМинистерство науки и высшего образования РФ Филиал федерального государственного бюджетного образовательного учреждения высшего образования «Воронежский государственный технический университет» в г. Борисоглебске
Борисоглебский филиал
КИНЕМАТИКА
МЕТОДИЧЕСКИЕ УКАЗАНИЯ к организации самостоятельной работы
по дисциплине «Теоретическая механика»
для студентов инженерно-строительных направлений очной и заочной форм обучения
Воронеж – 2021
УДК 531.1/4 ББК 22.21
Составитель Т. В. Зульфикарова
Кинематика: методические указания к организации самостоятельной работы по дисциплине «Теоретическая механика» для студентов инженерностроительных направлений очной и заочной форм обучения / Т. В. Зульфикарова; Борисоглебск: Филиал ФГБОУ ВО «Воронежский государственный технический университет»; сост.: Т. В. Зульфикарова. - Воронеж: Изд-во ВГТУ,
2021. - 23 с.
Методические указания включают задания для самостоятельных и контрольных работ по теоретической механике, указания к решению задач, примеры решения и краткие теоретические сведения, необходимые для выполнения заданий.
Предназначены для студентов строительных направлений очной и заочной форм обучения.
Методические указания подготовлены в электронном виде и содержатся в файле МУ СР_Кинематика. pdf.
Ил. 30. Табл. 3 Библиогр.: 6 назв.
УДК 531.1/4 ББК 22.21
Рецензент - Л. И. Матвеева, канд. техн. наук, заведующий кафедрой естественнонаучных дисциплин филиала ФГБОУ ВО «Воронежский государственный технический университет» в городе Борисоглебске
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
2
|
ОГЛАВЛЕНИЕ |
|
ОБЩИЕ УКАЗАНИЯ................................................................................................ |
4 |
|
Методические указания и требования к оформлению ....................................... |
5 |
|
II. КИНЕМАТИКА .................................................................................................... |
6 |
|
2.1. Кинематика материальной точки .................................................................. |
6 |
|
2.2. Задача К1. |
Кинематика материальной точки ............................................... |
8 |
2.3. Кинематика плоского движения твердого тела ......................................... |
10 |
|
2.4. Задача К2. |
Исследование движения плоского механизма........................ |
13 |
2.5. Задача К3. |
Сложное движение материальной точки................................. |
17 |
БИЛИОГРАФИЧЕСКИЙ |
|
|
СПИСОК…………………………………………………………………….Ошибка! Закладка не |
||
определена. |
|
|
3
ОБЩИЕ УКАЗАНИЯ
Теоретическая механика – это наука об общих законах механического движения и механического взаимодействия материальных тел, которая лежит в основе других технических дисциплин: сопротивления материалов, технической механики, строительной механики и др.
В теоретической механике рассматриваются материальные тела, размеры которых много больше межмолекулярных расстояний и которые движутся со скоростями, много меньшими скорости света. В теоретической механике рассматриваются не реальные тела, а их идеализированные модели, такие, как материальная точка, система материальных точек, абсолютно твердое тело, сплошная упругая среда и т.д. Модели позволяют абстрагироваться от некоторых несущественных признаков и выявлять наиболее общие законы механического движения и механического взаимодействия, справедливые для многих материальных тел независимо от многообразия их физических свойств.
Движение материальных тел рассматривается в трехмерном евклидовом пространстве с течением времени. В теоретической механике принимаются наиболее примитивные представления о пространстве и времени. Считается, что пространство и время не зависят от характера движения в них материальных тел (пространство и время абсолютны). Пространство всюду однородно, изотропно и непрерывно. Время протекает одинаково во всех системах отсчета и также как пространство однородно и непрерывно.
Движение рассматривается относительно выбранной системы отсчета. Под системой отсчета понимают совокупность тела отсчета, жестко связанных с ним координатных осей и часов. Тело движется, если с течением времени происходит изменение координат хотя бы одной его точки, в противном случае тело находится в покое по отношению к этой системе отсчета. Тело может двигаться относительно одной системы отсчета и одновременно покоиться относительно другой. Таким образом, движение и покой понятия относительные. В инженерных расчетах систему отсчета, связанную с Землей, можно условно считать неподвижной.
По характеру решаемых задач курс теоретической механики делится на три части: статику, кинематику и динамику. В кинематике рассматривается движение тел с чисто геометрической точки зрения, без учета причинноследственных связей. Данное пособие содержит краткий теоретический материал, задания для контрольных работ по второму разделу теоретической механики «Кинематика», примеры решения задач.
4
Требования к оформлению
Объем работ и шифр заданий назначаются преподавателем. Шифр заданий двухзначный. Последняя цифра шифра определяет номер расчетной схемы (рисунка), первая цифра – номер условия (комплекта исходных данных для расчета, которые берутся из таблиц). Например, двузначный шифр 46 означает, что исходные данные к задаче следует взять по условию 4 из таблицы, а расчетную схему – по рис. 6.
К каждой задаче даются 10 вариантов расчетных схем (рис.) и таблица, содержащая 10 вариантов исходных данных к расчету (нагрузок). Нумерация рисунков двойная. Например, рис. К1.4 означает, что это рис. 4 к задаче К1. Варианты исходных данных от 0 до 9 проставлены в 1-м столбце (или в 1-й строке) таблицы.
Каждая контрольная работа выполняется в отдельной тетради, страницы которой нумеруются. На обложке указываются: название дисциплины, номер работы, фамилия и инициалы студента, факультет, специальность и адрес. На первой странице тетради записываются: номер контрольной работы, номера решаемых задач.
Решение каждой задачи обязательно начинать на развороте тетради, на четной странице (для удобства проверки). Сверху указывается номер задачи, далее делается расчетная схема (карандашом), записываются исходные данные и искомые величины (текст задачи не переписывать). Расчетная схема выполняется с учетом данных решаемого варианта задачи: все углы, действующие силы, число сил и их расположение на рисунке должны соответствовать этим условиям.
Расчетная схема должна быть аккуратной и наглядной, а ее размеры должны позволить показать все необходимые векторы (силы, скорости, ускорения и др.). Решение каждой задачи необходимо сопровождать краткими пояснениями, какие аксиомы, теоремы или законы используются для решения; какие математические преобразования приводят к результату и т.п. Студентам необходимо подробно излагать весь ход расчетов, указывая единицы измерения получаемых величин. На каждой странице нужно оставлять поля для замечаний рецензента.
5
II.КИНЕМАТИКА
2.1.Кинематика материальной точки
Кинематика – раздел теоретической механики, в котором изучается механическое движение материальных тел с геометрической точки зрения вне зависимости от вызвавших его причин.
Движение тел относительно. С точки зрения кинематики неважно, покоится выбранная система или движется, важно уметь определять положения тела в пространстве в любой момент времени относительно выбранной системы отсчета, а также вычислять ее кинематические характеристики: скорость, ускорение, секторную скорость, угловые скорость и ускорение и др.
Движение материальной точки можно задать разными способами: векторным способом, координатными способами, естественным способом.
Линия, вдоль которой движется материальная точка, называют траекторией. В зависимости от формы траектории движение точки бывает прямолинейным или криволинейным.
Способы задания движения точки
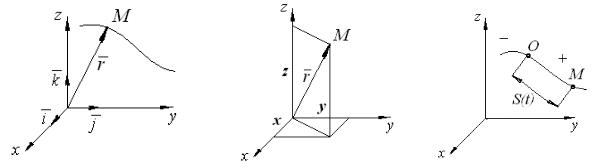
1. Векторный способ Положение точки М в пространстве можно определить радиус-
вектором , который проводится из начала координат к исследуемой точке (рис. 2.1). При движении точки радиус-вектор изменяет свою длину и направление, следовательно,
.
2. Координатный способ.
Положение точки М в пространстве можно задать тремя координатами , которые являются скалярными уравнениями (рис. 2.2)
.
Рис. 2.1 |
Рис 2.2 |
Рис. 2.3 |
Связь между координатным и векторным способами задания движения
осуществляется уравнением (рис. 2.2)
.
6
Например, если радиус-вектор материальной точки задан уравнением
,
это означает, что точка движется относительно координатных осей согласно уравнениям , , .
3. Естественный способ Естественный способ применяется, если траектория движения точки
известная кривая. Если определить начальное положение точки на траектории и положительное направление движения (рис. 2.3), то для описания движения достаточно одного скалярного уравнения .
Определение скорости и ускорения точки
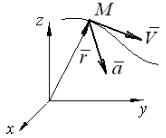
1.Векторный способ:
– вектор скорости точки в данный момент времени;
– вектор ускорения точки в данный момент времени.
Вектор скорости направлен по касательной к траектории в данной точке в сторону движения. Вектор ускорения направлен в сторону вогнутости траектории (рис 2.4).
|
|
Рис. 2.4 |
2. Координатный способ: |
||
а) |
– проекции скорости точки на |
|
оси координат; |
|
|
|
|
|
√ |
– модуль скорости точки; |
|
|
|
– направление вектора скоро- |
сти определяется по направляющим косинусам; |
|
|||
|
– углы, которые составляет вектор скорости точки с положи- |
|||
тельными направлениями осей |
соответственно. |
|||
б) |
|
|
– |
проекции ускорения |
точки на оси координат; |
|
|
||
√ |
|
– модуль ускорения точки; |
|
|
|
|
|||
|
|
|
– |
направление вектора |
ускорения определяется по направляющим косинусам; |
|
|||
|
– углы, которые составляет вектор ускорения с положитель- |
|||
ными направлениями осей |
соответственно. |
|
||
|
|
|
7 |
|
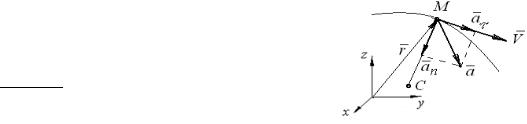
3.Естественный способ:
–модуль скорости точки;
– вектор ускорения точки;
√– модуль ускорения;
– касательное ускорение;
– нормальное ускорение; Рис.2.5 С – центр кривизны; ρ = МС – радиус кривизны траектории.
2.2. Задача К1. Кинематика материальной точки
Материальная точка движется в плоскости xОy. Уравнения движения заданы в параметрической форме , ( и измеряются в метрах, – в секундах). Данные для расчета следует взять из табл. К1, К1а).
Таблица К1.
|
Предпо- |
Уравнение дви- |
|
|
|
|
|
|
|
следняя |
жения по оси Ох |
|
Примечания |
|
|||
цифра шифра |
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
1 |
|
– |
для вариантов от 00 до 29 (две последние |
|
||||
2 |
|
– |
цифры шифра) взять из столбца 2 табл. К1а |
|
||||
3 |
|
– |
|
|
|
|
|
|
4 |
|
– |
для вариантов от 30 до 69 (две последние |
|
||||
5 |
|
|
|
|||||
|
|
цифры шифра) взять из столбца 3 табл. К1а |
|
|||||
6 |
|
– |
|
|||||
|
|
|
|
|
|
|||
7 |
|
– |
|
|
|
|
|
|
8 |
|
|
для вариантов от от 70 до 99 (две последние |
|
||||
9 |
|
– |
цифры шифра) взять из столбца 4 табл. К1а |
|
||||
|
|
|
|
|
|
Таблица К1а |
||
|
Последняя |
|
Уравнение движения точки по оси Оy: |
|
||||
|
цифра |
|
Для вариантов |
|
Для вариантов |
Для вариантов |
|
|
|
шифра |
|
от 00 до 29 |
|
от 30 до 69 |
от 70 до 99 |
|
|
|
1 |
|
2 |
|
3 |
4 |
|
|
|
0 |
|
|
|
|
– |
|
|
|
1 |
|
– |
|
|
– |
|
|
|
2 |
|
– |
|
|
|
|
|
|
3 |
|
– |
|
|
– |
|
|
|
4 |
|
– |
|
|
– |
|
|
|
5 |
|
– |
|
– |
– |
|
|
|
6 |
|
– |
|
– |
|
|
|
|
7 |
|
– |
|
|
– |
|
|
|
8 |
|
|
|
– |
– |
|
|
|
9 |
|
– |
|
|
– |
|
|
|
|
|
|
8 |
|
|
|
|
Определить и изобразить на чертеже траекторию движения точки, за начало движения принять момент времени . Определить скорость и ускорение точки, а также ее касательное и нормальное ускорения в момент времени t = 1с. Рассчитать радиус кривизны в соответствующей точке траектории в заданный момент времени.
В последующих расчетах потребуются знание тригонометрических
формул – – ; , а также навыки дифференцирования.
Пример решения задачи К1
Дано: Уравнения движения точки в плоскости xОy:
– |
|
; |
|
– , |
|
|
где x, y – в метрах, t – в секундах.
Определить и показать на чертеже уравнение траектории точки. Вычислить ее скорость и ускорение в момент времени . Определить касательную и нормальную составляющие ускорения в этот же момент времени, а также радиус кривизны траектории в месте ее нахождения через 1с после начала движения. Показать векторы скорости и ускорения этой точки.
Решение Уравнения движения заданы в параметрической форме. Определим
уравнение траектории точки, исключив из уравнений движения параметр (время t). Для этого выразим из уравнений движения тригонометрические функции
,
возведем их в квадрат и воспользуемся тригонометрической формулой
:
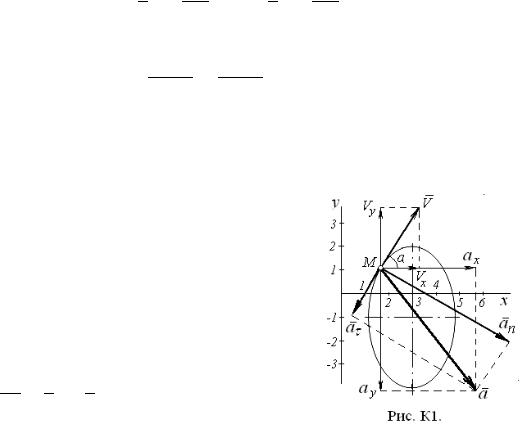
.
Полученное уравнение является уравнением эллипса (рис. К1). Построить траекторию точки можно любым способом, например, по точкам, с помощью компьютера, или с использованием характерных признаков эллипса: положения его центра, длины полуосей. Укажем на траектории начальное положение точки.
Найдем на траектории положение точки М через после начала движения, определив ее координаты:
Скорость точки найдем по ее проекциям на координатные оси, учитывая дифференциальную зависимость между координатами и проекциями скорости:
; |
|
|
|
|
|
; |
|
|
|
9

|
√ |
|
|
Для момента времени |
они равны: |
; |
; |
.
Используя дифференциальную зависимость между скоростью и уско-
рением, найдем ускорение точки: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
√ |
, |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для |
момента |
времени |
|
|
они |
равны: |
|
|
|
|
|
; |
|
|
|||||||||||
; |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Спроецируем ускорение на касательное направление: |
|
|
|
||||||||||||||||||||||
|
|
|
|
, где |
|
|
|
⁄ |
|
|
|
|
|
|
⁄ . |
|
|
|
|||||||
После подстановки и преобразования получим |
|
|
|
|
|
, тогда |
|||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
нормальное ускорение |
|
|
√ |
, а радиус кривизны траектории |
|
|
. |
||||||||||||||||||
|
|
|
|||||||||||||||||||||||
Для |
получим: |
|
|
– |
; |
|
|
|
|
|
|
; |
|
|
|
. |
|
|
|||||||
Покажем найденные кинематические характеристики точки М, изобра- |
|||||||||||||||||||||||||
женной на траектории (см. рис. К1). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Ответ: |
; |
|
|
|
|
|
; |
|
– |
; |
|
|
|
|
; |
|
|
||||||||
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.3. Кинематика плоского движения твердого тела
Плоским движением (плоскопараллельным) называется такое движение твердого тела, при котором все его точки движутся в параллельных плоскостях. Поэтому задача изучения плоского движения сводится к изучению движения плоской фигуры, параллельной плоскости движения.
Плоское движение тела в механике принято представлять как сумму двух простых движений: поступательного и вращательного. При поступательном движении все точки тела движутся одинаково (по одинаковым траекториям, с одинаковыми скоростями и ускорениями), поэтому такое тело можно рассматривать как материальную точку и применять к нему кинематическую теорию материальной точки. При осевом вращательном движении все точки тела движутся по окружностям, такое движение характеризуется угловыми параметрами: угловым перемещением , угловой скоростью и угловым ускорением .
Векторы и всегда направлены в одну сторону вдоль оси вращения, их направление определяется правилом правого винта. Векторы и имеют одинаковое направление при ускоренном вращении и противоположно направлены при замедленном вращении.
10