

Учебное пособие 1138
.pdfПередаточные функции определяются
Wдс(р) = Uдс(р)/ Ω1(р)=Кдс
Wдп(р) = Uдп(р)/ Ψ2(p)=Кдп
Регулятор скорости РС и регулятор перемещения РП представляют собой маломощный электронный усилитель с изменяемыми коэффициентами передачи Крс и Крп.
Уравнения РС и РП записываются
Uрс(t)=Крс* Uзс(t)
Uдп(t)=Крп* Uзп(t)
где Uзс(t), Uзп(t) – входные сигналы; Uрс(t),Uдп(t) – выходные сигналы.
Передаточные функции РС и РП определяются по формулам
Wрс(р) = Uрс(р)/ Uзс(р)=Крс
Wдп(р) = Uдп(р)/ Uзп(р)=Крп
2. Исследование технических систем производится с целью получения определенных параметров временных процессов при управлении. Анализ временных процессов в технической системе основан на использовании построенных переходных h(t) и импульсных переходных характеристик w(t).
Пусть на вход ММ, представленной на рис. 13, подается временной сигнал x(t), а на выходе появляется временной сигнал y(t).
X |
|
Y |
||
W(p) |
||||
|
|
|
||
|
|
|
||
|
|
|
|
|
Рис. 13 ММ
19
Если на вход системы подается стандартный единичный ступенчатый сигнал вида 1(t), то на выходе появляется переходная характеристика h(t).
Если на вход системы подается дельта импульс вида δ(t), то на выходе появляется импульсная переходная характеристика w(t).
На рис. 14 представлены временные диаграммы для стандартных входных и выходных сигналов соответственно переходной и импульсной переходной характеристик.
1(t)
h(t)
δ(t)
w(t)
Рис.14 Переходная и импульсная переходная характеристики
Рассмотрим определение временных характеристик для ММ редуктора, подставляя в уравнения временные характеристики.
Для редуктора с уравнением
Ω2(t) = К*Ω1(t)
h1(t) = К*1(t).
20

Для редуктора с уравнением |
Ψ2(t) = К*∫Ω1(t)dt |
h2(t) = К*∫1(t)dt =К*t. |
Для редуктора с уравнением |
Ω2(t) = К*d Ψ1(t)/dt |
h3(t) = К*d 1(t)/dt. |
На рис. 15 представлены временные диаграммы пере- |
ходных характеристик h(t) с момента времени t1 для редукто- |
ра с соответствующими ММ. |
1(t) |
t1 |
h1(t) |
h2(t) |
h3(t) |
Рис.15 Переходные характеристики |
21 |
Импульсная переходная характеристика это производная по времени от переходной характеристики, то есть скорость изменения выходного сигнала. Для первого и третьего
случаев w(t1=0) = ∞ и w(t›t1) = 0. Для второго случая w(t)=К. При изменении коэффициента передачи К редуктора пе-
реходные характеристики для первого и второго случая изменяются, а для третьего случая - не изменяется.
При изменении коэффициента передачи К редуктора импульсные переходные характеристики для первого и третьего случаев не изменяются, а для второго случая изменяются.
Лекция 3
1.Математическое описание двигателя
2.Типовые звенья в моделировании
3.Переходная характеристика и ее параметры
1. В МРС используются различные типы двигателей: постоянного, переменного и импульсные (шаговые). Первые два типа используются во всех типах станков. ММ данных двигателей аналогичны.
Рассмотрим в качестве двигателя постоянного тока (ДПТ) – двигатель с возбуждением от постоянных магнитов. Управление ДПТ осуществляется по одной цепи – цепи якорной обмотки с помощью подводимого напряжения от источника питания.
ММ ДПТ с обмоткой возбуждения ММ получается, используя ММ ДПТ с постоянными магнитами
На рис. 16,17 представлены условное обозначение и схема замещения ДПТ схема замещения с указанием скорости вращения Ω1(t), момента сопротивления Мс(t), сопротивления якорной обмотки Rя, индуктивности Lя, мгновенного значе-
ния тока iя(t),наводимой э.д.с. E(t) и напряжения Uн(t).
22

|
|
|
|
|
|
Ω1(t) |
|
|
|
|
Rя |
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
Uн(t) |
|
|
|
|
|
|
Uн(t) |
iя(t) |
|
Lя |
|||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|||||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
E(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|||||||||
Рис. 16 Условное обозначение Рис. 17 |
Схема замещения |
||||||||||||
Используя уравнения Кирхгофа для электрических цепей и уравнения моментов для электромеханических цепей для ДПТ, запишем
Мд(t) = Мн(t)- Мс(t)
Uн(t) = iя(t)*R + L*d/dt iя(t) + E(t)
В соответствии с принятыми обозначениями входа X и выхода Y необходимо получить уравнение, где вход – напряжение Uн(t), а выход - угловая скорость Ω1(t). Принимаем значение момента нагрузки Мс=0.
Значение э.д.с. E(t) и значение электромагнитного номинального момента Мн(t) определяется
E(t)=Се* Ω1(t) Мн(t)=См* iя(t).
Из уравнения моментов определяем значение тока
iя(t)=Jн/См *d Ω1(t) /dt.
Записываем окончательное уравнение по закону Кирхгофа при замене в нем значения полученного тока iя(t). дополнительно поделив его слагаемые на величину Се и доба-
23
вив в числитель и знаменатель при производной d²Ω1(t)/dt² значение сопротивления Rя, при этом выходная величина записывается в левой части, а входная в правой части
JнRя/СмСе *Lя/Rя*d²Ω1(t)/dt² + JнRя/СмСе*dΩ1(t)/dt +Ω1(t)=1/Се*Uн(t).
Производим замену р=d/dt и получаем уравнение в операторной форме. При этом вводим обозначения механической постоянной времени Тм= JнRя/СмСе, электрической постоянной времени Тэ=Lя/Rя и коэффициента передачи Кд=1/Се.
Тм*Тэ*р²*Y(p) + Тм*р*Y(p) + Y(p) = Кд*X(p).
Передаточная функция или математическая модель ДПТ определяется
W(p) = Кд/( Тм*Тэ*р² + Тм*р + 1).
Если принять значение Тэ = 0, то ММ ДПТ определяется по формуле
W(p) = Кд/( Тм*р + 1).
При отсутствии переходных процессов, то есть значения d/dt=0 и d²/dt²=0, получаем установившийся режим работы ДПТ
Ω1=Кд*Uн,
где Ω1установившееся значение скорости вращения ДПТ;Uн - значение напряжения.
2. При моделировании любых элементов в ТАУ вводится понятия типовых динамических звеньев (ТДЗ). ТДЗ – это типовых ММ, уравнения которых порядка не выше 2-го.
24
Все ТДЗ разбиты на три класса. Рассмотрим основные ТДЗ, которые используются для описания элементов системы регулирования скорости и системы регулирования перемещения.
Интегрирующие звенья:
W(p) = К/р - интегрирующее звено,
W(p) = К*( Тм*р + 1)/p – изодромное звено.
Основное свойство выходного сигнала: y(t=∞) = ∞.
Дифференцирующие звенья.
W(p) = К*р - интегрирующее звено,
W(p) = К*( Тм*р + 1) – форсирующее звено.
Основное свойство выходного сигнала: y(t=0) = ∞, а при y(t>0) =0.
Позиционные звенья
W(p) = К – пропорциональное,
W(p) = К/(Т*р + 1) – апериодическое,
W(p) = К/( Т²2*р² +Т1*р + 1) – апериодическое 2-го порядка,
W(p) = Кд/( Т²*р² +2*Do*Т*р + 1) – колебательное.
Основное свойство выходного сигнала позиционных звеньев: y(t=∞) = Ууст = К*Хуст,
25
где Хуст, Ууст – установившееся (постоянное значение) входного и выходного сигналов.
Представленные ММ ТДЗ используются двояко: для описания ММ технического элемента или системы; для преобразования входного сигнала во временной области. Все ТДЗ имеют известные переходные процессы и системы, состоящие из них, так же имеют переходные процессы.
3. Для анализа технических систем вводятся параметры качества регулирования, которые определяют быстродействие системы, точность, наличие скорости и ускорения в переходном процессе.
Чаще всего колебательная переходная характеристика возникает в системе УЧПУ-МРС в ходе выполнения различных технологических операций.
На рис. 18 представлена переходная характеристика и выполнены дополнительные построения для определения параметров качества регулирования.
К основным показателям качества регулирования относятся: допустимое отклонение Δ, время регулирования tр; ха-
рактеристика величины колебательности ζ, число колебаний n, статическая точность δ.
Значение колебательности оценивается по формуле:
ζ = (ζмак – ζуст)/ζуст * 100%.
Для технических систем допустимое отклонение задает-
ся = ± 0,05*hуст.
Время регулирования определяется по графику переходной характеристики, как последнее касание верхней 1,05*hуст или нижней 0,95*hуст границ запретной зоны для допустимого отклонения, то есть это время по истечении ко-
26

Рис. 18 Переходная характеристика
торого переходная характеристика отличается от своего установившегося значения на величину допустимого отклонения.
Число колебаний n определяется с момента первого достижения значения hуст, то есть колебания вниз и вверх относительно этого значения.
Статическая точность определяется по формуле:
δ =(Хуст - Ууст)/Хуст *100%.
При проектировании технических систем указывается вид переходного процесса и его параметры качества регулирования
В зависимости от ММ в системе возможно наблюдать три вида переходных процессов: апериодический первого порядка; апериодический второго порядка и колебательный.
27
На рис. 19 представлены три вида переходных характеристик с определением параметров качества регулирова-
Step Response
1.4 |
|
|
|
|
|
|
|
|
1.2 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
|
Amplitude |
|
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
t1 |
t2 |
|
t3 |
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
Time (sec)
ния.
Рис. 19 Три вида переходных характеристик
Для технической системы с уравнением 1-го и 2-го порядков оценивается влияние коэффициента передачи К, постоянной времени Т и коэффициента демпфирования Do на вид и параметры переходного процесса.
Коэффициент передачи К влияет на установившееся значение hуст, постоянная времени - на значение времени регулирования tр и коэффициент демпфирования Do – на характеристику колебательности.
28

Лекция 4
1.Структурная схема. Примеры структурных схем
2.Инженерная методика определения времени регулирования
1. В ТАУ технические системы изображаются графически в виде структурных схем. Структурная схема (СХ) – это графическое изображение функциональной схемы системы с сохранением связей между элементами, где каждый элемент представлен ММ - то есть ПФ.
Каждая СХ состоит из основных частей:
элемент сравнения
линия связи
элемент схемы
ММ
Все элементы в СХ соединены последовательно, параллельно и с обратной связью ( встречно – параллельное соединение ).
Рассмотрим виды соединений для ММ редуктора, представленного ПФ W(s).
Последовательное соединение.
W1 |
|
W2 |
|
Wпос |
|
|
|
|
|
Wпос = W1*W2.
29
Параллельное соединение
W1
Wпар
W2
Wпар = W1 + W2.
Встречно – параллельное или соединение с отрицательной обратной связью (ОС)
W1
Wос
W2
Wос = W1 / (1 + W1*W2).
Рассмотрим примеры СХ для ММ редуктора и представим переходные характеристики для соединения пропорциональных, интегрирующих и дифференцирующих звеньев.
Последовательное соединение пропорционального W1=K1 и дифференцирующего W2=K2*p звеньев.
К1 |
|
К2*р |
|
К1*К2*р |
|
|
|
|
|
Переходная характеристика
∞ t=0
h(t) =
0 |
t ≥0. |
30
Последовательное соединение пропорционального W1(p)=K1 и интегрирующего W2(p)=K2/р звеньев.
К1 |
|
К2/р |
|
К1*К2/р |
|
|
|
|
|
Переходная характеристика
h(t) = (K1*K2*t)*1(t).
Последовательное соединение пропорционального W1(p)=K1 и пропорционального W1(p)=K2 звеньев.
К1 |
|
К2 |
|
К1*К2 |
|
|
|
|
|
Переходная характеристика
h(t) = K1*K2*1(t).
Последовательное соединение дифференцирующего W1(p)=K1*р и интегрирующего W2(p)=K2/р звеньев.
К1*р |
|
К2/р |
|
К1*К2 |
|
|
|
|
|
Переходная характеристика
h(t) = K1*K2*1(t).
На рис.20 представлены переходные характеристики последовательного соединения звеньев.
Параллельное соединение пропорционального W1=K1 и дифференцирующего W2=K2*p звеньев.
31
К1
|
|
|
|
|
|
|
|
|
|
|
|
|
К1+К2*р |
|
|
К2*р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переходная характеристика |
|
|
||||
|
|
|
|
|
∞ |
t = 0 |
|
|
|
h(t) = |
K1*1(t) |
t ≥0. |
|
Параллельное соединение пропорционального W1=K1 и интегрирующего W2=K2/p звеньев.
|
|
К1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К1+К2*р |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
К2*р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переходная характеристика |
|
|
|
|
|
||||
|
|
|
|
|
∞ |
t = 0 |
|||
|
|
|
h(t) = |
K1*1(t) |
t ≥0. |
||||
Параллельное соединение |
дифференцирующего |
||||||||
W1=K1*р и интегрирующего W2=K2/p звеньев. |
|||||||||
|
|
|
|
|
|
|
|
||
|
|
К1*р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К1*р+К2/р |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
К2/р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
32 |
|
|
|
|
|
||||

Переходная характеристика
|
∞ |
t = 0 |
h(t) = |
K1*t |
t ≥0. |
Параллельное соединение пропорционального W1=K1 и пропорционального W2=K2 звеньев.
К1
К1+К2
К2
Переходная характеристика
h(t) = K1*К2*1(t).
На рис.21 представлены переходные характеристики параллельного соединения звеньев.
Встречно-параллельное соединение звеньев называется соединением с отрицательной обратной связью (ООС). СХ с ООС изменяют параметры охватываемого ТДЗ
Рассмотрим соединения пропорционального, интегрирующего и дифференцирующего ТДЗ.
Встречно-параллельное соединение пропорционального W1(p)=K1и пропорционального W1(p)=K2 звеньев.
K1
Ко
K2
Переходная характеристика
33
h(t) = Kо*1(t),
где Ко=K1/(1+K1*K2) – коэффициент передачи. Встречно-параллельное соединение интегрирующего
W1(p)=K1/р и пропорционального W1(p)=K2 звеньев.
K1/р
Kо/(То*р+1)
K2
Переходная характеристика
h(t) = Kо(1-е-T|t)*1(t),
где Ко=K1/(1+K1*K2)–коэффициент передачи; То=Т1/(1+К1*К2) – постоянная времени.
Встречно-параллельное соединение дифференцирующего W1(p)=K1*р и пропорционального W1(p)=K2 звеньев.
K1*р
K1*р/(То*р+1)
K2
Переходная характеристика
h(t) = Kо*(е-T|t)*1(t),
где То=К1*К2 – постоянная времени. На рис. 22 представлены переходные характеристики СХ с встречнопараллельным соединением.
34

Рис. 20 ПХ последовательного соединения
Рис. 21 ПХ параллельного соединения
Рис. 22 ПХ встречно-параллельного соединения
35
2. По переходной характеристике определяют параметры элемента или системы. Или используя ММ можно рассчитать параметры ее переходной характеристики
Для разомкнутого регулирования скорости с двигателем А-звеном и двигателем К-звеном установившееся значение переходной характеристики h(t) определяется коэффициентом передачи системы:
h(t=∞)=hуст=К*1(t≥0).
Теоретическое значение времени регулирования для систем или элементов определяется по инженерной методике, в зависимости от ожидаемого вида переходной характеристики для передаточной функции, то есть ММ, и значения постоянной времени Т.
Для переходной характеристики апериодической первого порядка время регулирования определяется: tрег = 3*Тм.
Для переходной характеристики апериодической второго порядка время регулирования определяется: tрег = 5*Т.
Для переходной характеристики колебательной с характеристикой колебательности ζ= 4,5% время определяется:
tрег = 3,55*Т.
Для переходной характеристики апериодической первого порядка определяется и постоянная времени Т, как значение времени t при 0,63*hуст или как пересечение касательной, проведенной в точке t=0, значения hуст.
Лекция 5
1.СХ САР скорости и ее преобразование
2.Влияние коэффициента передачи Крс
3.СХ СПП и ее переходные характеристики
36

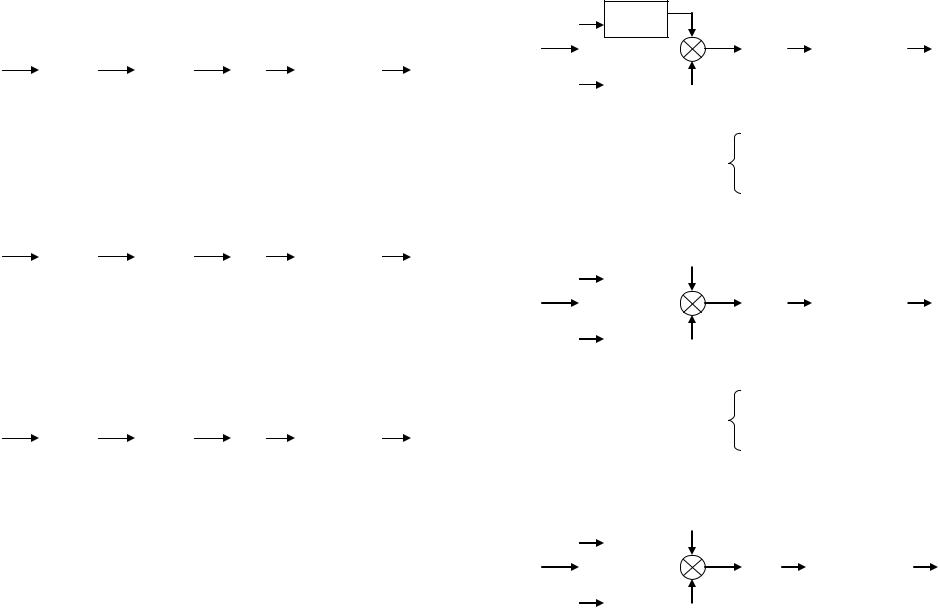
1. Рассмотрим СХ САР скорости и СПП, полученные из приведенных функциональных схем системы УЧПУ-МРС.
В зависимости от ММ двигателя постоянного тока существует несколько СХ САР скорости.
На рис. 23 САР скорости включает ММ регулятора скорости Wрс(р), ММ системы управления Ксу, ММ датчика скорости Кдс и ММ ДПТ Wд(p), как апериодического звена (А-звена).
|
|
|
Wрс(p) |
Wсу(p) |
Wд(p) |
|||||||
X |
|
|
|
|
|
|
|
У |
||||
Крс |
|
Ксу |
|
|
К / (Т p + 1) |
|||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Wдс(p) |
|
||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Кдс
Рис. 23 СХ САР скорости с двигателем А - звеном
На рис. 24 САР скорости включает ММ регулятора скорости Wрс(р), ММ системы управления Ксу, ММ датчика скорости Кдс и ММ ДПТ Wд(p), как колебательного звена (К-звена).
|
|
|
Wрс(p) |
Wсу(p) |
Wд(p) |
|||||||
X |
|
|
|
|
|
|
|
У |
||||
Крс |
|
Ксу |
|
|
К / (Т² p² + 2 DoТ p + 1) |
|||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Wдс(p) |
|
||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Кдс
Рис. 24 СХ САР скорости с двигателем К-звеном.
37
Представленные СХ САР скорости методом преобразования можно упростить и свести к ТДЗ.
Для СХ САР скорости с двигателем А-звеном ММ выражается
Wсар(p) = Ко/ (То*р + 1),
где Ко=Крс*Ксу*К/(1 + Крс*Ксу*К*Кдс) – коэффициент передачи; То=Т/(1 + Крс*Ксу*К*Кдс) – постоянная времени.
Для СХ САР скорости с двигателем К-звеном ММ выражается
Wсар(p) = Ко / (Т²о p² + 2 DoоТо p + 1),
где Ко=Крс*Ксу*К/(1 + Крс*Ксу*К*Кдс) – коэффициент передачи; То=Т/ √(1 + Крс*Ксу*К*Кдс) – постоянная времени; Dоo=Do/√(1 + Крс*Ксу*К*Кдс) – коэффициент демпфирования.
Для СХ САР скорости с двигателем А-звеном переходная характеристика определяется выражением
-t / Tо h(t) = Kо ( 1 - е ).
Значения переходной характеристики определяются по точкам t=0, t=To, t=2To, t=3To.
Для СХ САР скорости с двигателем К-звеном переходная характеристика определяется
-αt
h(t)= Ко ( 1 - K1 е sin ( β t + Ψ ).
Обычно в САР скорости изменяемым параметром является коэффициент передачи регулятора скорости Крс.
38