


Рис. 5. Расчленение механизма на структурные группы
2. ПОСТРОЕНИЕ ПОЛОЖЕНИЯ МЕХАНИЗМА
Кинематические характеристики кривошипно-ползунного (и любого другого) механизма могут быть определены и с помощью графоаналитического метода, или, как его чаще называют, метода планов положений, скоростей и ускорений.
Планом механизма называется масштабное графическое изображение кинематической схемы механизма соответствующее заданному положению входного звена.
При известных размерах звеньев механизма синтез механизма в ка- ком-либо положении осуществляется методом «засечек», который заключается в геометрическом построении положения на плоскости центра вращательных пар. Последовательность построения, с учетом заранее выбранного
масштаба построения µ плана механизма (рис. 6):
1)расположить на плоскости по заданным размерам элементы изображения стойки (точки A и D, ось x-x);
2)в одном из заданных углом ϕ положений присоединить ведущее
звено АВ;
3)из точки В и точки D провести дуги радиусом соответствующих за-
данных размеров (lBC , lCD), пересечение которых определит положение вращательной пары С;
4)на продолжении отрезка [DC] радиусом lDE найти т.Е;
5)из точки Е радиусом lEF провести дугу до пересечения с линией x-x движения ползуна, пересечение которых определит положение поступательной пары, в точке F.
7

Рис. 6. Построение положения механизма
3. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
При кинематическом исследовании плоских механизмов методом планов скоростей и ускорений встречается два случая:
1) две точки (одна исследуемая, вторая с известным законом движения, которое принимается в качестве переносного) принадлежат одному и тому же жесткому звену.
В данном случае относительное движение этих точек получается за счет вращательного движения звена, на котором они находятся.
При определении ускорений относительное ускорение раскладывается на нормальное (известное из физики как центростремительное – стремящееся к центру вращения) и тангенциальное.
Рис. 7. Точки жесткого звена
8

Для примера, приведенного на рис. 7, нормальное ускорение точки В
относительно точки А будет направлено вдоль радиуса ВА к точке А. Та |
н- |
генциальное – перпендикулярно этому радиусу; |
|
2) звенья соединяются поступательной парой. В этом случае рассмат- |
|
риваются две точки, совпадающие в данный момент времени по своему п |
о- |
ложению, но принадлежащие разным звеньям – одна ползуну, другая направляющей.
4. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕТОД ПЛАНА СКОРОСТЕЙ
Метод планов скоростей и ускорений относится к графоаналитическим методам исследования кинематики механизмов в теории механизмов и машин.
Планом скоростей называют чертеж, на котором скорости различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей в данный момент времени.
Построение планов скоростей и ускорений проводится на основе последовательного составления векторных уравнений для точек звеньев механизма, начиная с ведущего звена, угловая скорость ω1 которого задана.
Скорость точки B (рис. 6) находится из выражения:
VB =ω1 lAB . |
(3) |
И вектор скорости точки B направлен в сторону вращения ведущего звена перпендикулярно звену АВ.
Скорость точки C определяется из векторной системы уравнений:
VC = VB + VCB ;
VC = VD + VCD ,
где VB , VC , VD - векторы абсолютных скоростей точек; торы относительных скоростей.
(4)
VCB , VCD - век-
9
Система уравнений (4) решается графическим способом. При этом учитывается, что VCD CD , VCB BC , VD = 0.
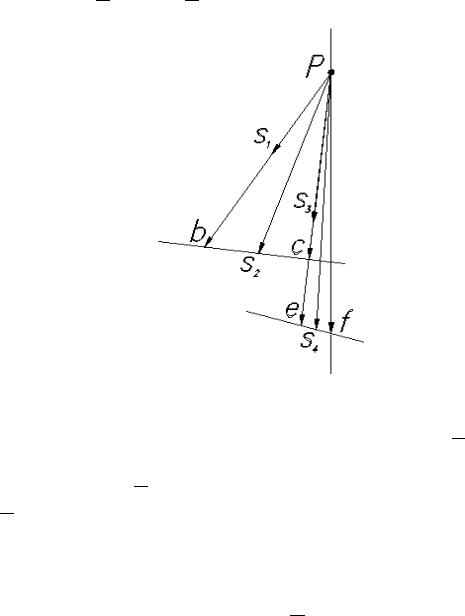
Рис. 8. План скоростей
Из полюса P плана скоростей в направлении вектора VB необходимо провести отрезок <pb> равный 100…150 мм (рис. 8). Направление вектора абсолютной скорости VC провести до полюса P, а вектор относительной ско-
ростиVCB из точки B. Пересечение линий даёт точку C. Причём масштаб плана скоростей µV вычисляется по известным величинам:
µ |
|
= |
VB |
( |
м/ с |
), |
(5) |
|
V |
|
|||||||
< pc > |
||||||||
|
|
|
мм |
|
||||
где <pc> - длина вектора скоростиVCB .
Величины VСB и VC из плана скоростей с учетом масштаба изображения рассчитываются по формулам:
VCB =<cb > µV , |
(6) |
VC =< pc > µV . |
(7) |
Определяем скорость точки E, принадлежащей кривошипу СD. Согласно свойству плана скоростей:
< pc > |
= |
lCD |
. |
(8) |
< pe > |
|
|||
|
lDE |
|
||
Графически <pe> находим на продолжении отрезка <pc>. Причем абсолютная скорость точки Е:
VE =< pe > µV . |
(9) |
10
Скорость точки F определяется аналогично, с помощью графического решения системы векторных уравнений:
|
|
|
|
= |
|
|
|
+ |
|
|
|
|
; |
|
V |
|
V |
|
V |
|
|||||||||
|
|
F |
|
E |
|
|
FE |
|
(10) |
|||||
|
V |
F |
= |
V |
X + |
V |
XX , |
|
||||||
где VE , VF , VX - векторы абсолютных скоростей точек; VCB , VCD , VXX - векторы относительных скоростей; VX, VXX - скорость движения системы координат (прямой x-x), VXX = 0.
При решении уравнений (10) учитываем, что VFE EF , VX //x-x. Направление вектора VFE перпендикулярно EF проводится из точки Е;
вектор VF - из полюса P вертикально (в направлении абсолютного перемеще-
ния звена 5).
Значения абсолютной и относительной скоростей точки F:
VFE =< fe > µV , |
(11) |
VF =< pf > µV . |
(12) |
Скорости центров масс VSi , находящихся в геометрическом центре
звеньев (стержней) определяются нахождением точки Si на планах скоростей на соответствующих звеньях отрезках в том же пропорциональном делении.
5. КИНЕМАТИЧЕСКИЙ АНАЛИЗ. МЕТОД ПЛАНА УСКОРЕНИЙ
Чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данный момент, называют планом ускорений механизма.
Исходными данными для построения плана ускорения являются план положения механизма (рис.6), план скоростей (рис.8) и ускорения точек ведущего звена AB.
Ускорение точки B ведущего звена, вращающегося равномерно равно:
a |
B |
= a n |
= ω2 l |
AB |
. |
|
(13) |
|
B |
1 |
|
|
|
||
Ускорение точки C определяется из векторных уравнений: |
|
||||||
|
|
|
n |
τ |
|
|
|
aC |
= aB + aCB + aCB ; |
(14) |
|||||
|
|
|
|
|
|
|
|
|
|
|
n |
τ |
|
, |
|
aC |
= aD + aCD + aCD |
|
|||||
где aB ,aC ,aD - векторы абсолютных ускорений точек, при чем aD = 0; aCBn ,aCDn - векторы нормальных ускорений; aCBτ ,aCDτ - векторы тангенциальных ускорений.
11

Векторы нормальных ускорений направлены перпендикулярно траектории движения точки, а векторы касательных ускорений параллельны траектории движения точки.
Рис. 9. План ускорений
В системе уравнений (14) известны направления всех шести векторов (кроме aC ) и модули четырёх из шести векторов. При этом:
n |
V2 |
(15) |
aCB = |
CB , |
|
|
lBC |
|
n |
V2 |
(16) |
aCD = |
C . |
|
|
lCD |
|
Векторное уравнение, имеющее две неизвестные величины, может
быть решено графически, аналогично решению векторного уравнения скоростей.
Из точки π - полюса плана ускорений в направлении отрезка CD плана положений необходимо провести вектор πb размером 80…100 мм (рис.9). Масштаб плана ускорений тогда будет равным:
µ |
|
= |
a |
B |
, |
( |
м/ с2 |
). |
(17) |
|
A |
< πb > |
мм |
||||||||
|
|
|
|
|
|
|||||
Из точки b плана ускорений в масштабе, в направлении BC провести отрезок <bn> равный:
< bn >= |
an |
(18) |
CB . |
||
|
µA |
|
Из точки n которого провести направление, тангенциального ускорения точки C относительно точки B перпендикулярно <bn>.
Из полюса π провести отрезок <πn> равный:
12
< πn >= |
an |
(19) |
CD , |
||
|
µA |
|
в направлении отрезка CD, из точки n которого провести направление тангенциального ускорения точки C относительно точки D перпендикулярно
<πn>.
Пересечение линий тангенциальных ускорений даёт точку C, ускорение которой с учетом масштаба равно:
aC =< πc > µA . |
(20) |
Ускорение точки Е находят по аналогии с планом скоростей из соотношения:
< πc > |
= |
lCD |
. |
< πe > |
|
lDE |
|
Графически <πe> также находится на продолжении отрезка Причем значение ускорения точки Е:
a E =< πe > µA .
Векторное уравнение для определения ускорения точки F:
(21)
<πc>.
(22)
aF = aE + aFEn + aFEτ ; |
(23) |
||||||
a |
F |
= a |
X |
+ an |
+ aτ , |
||
|
|
|
XX |
XX |
|
||
где aE ,aF ,aX - векторы абсолютных ускорений точек; aFEn ,aXXn - векто- |
|||||||
ры нормальных ускорений, при чем aXXn |
=0 ; |
aCBτ ,aXXτ |
- векторы тангенциаль- |
||||
ных ускорений, при чем aXXτ =0 .
Система уравнения (23) также имеет два неизвестных компонента и может быть решено графически.
Величина нормального ускорения точки F относительно E равна:
n |
V2 |
(24) |
aFE = |
FE . |
|
|
lEF |
|
Из точки e плана ускорений в масштабе, в направлении EF провести отрезок <en> равный:
|
an |
|
|
<en >= |
FE |
. |
(25) |
|
|||
|
µA |
|
|
Из точки n которого провести направление, тангенсального ускорения точки F относительно точки E перпендикулярно <en> до пересечения с вертикальной линией x-x. Пересечение двух прямых даст точку f, а значение ускорения точки F, будет равно:
a F =< πf > µA . |
(26) |
Ускорение центров масс определяются из планов ускорений аналогично определению их скоростей из планов скоростей.
13