

Методическое пособие 757
.pdfния имитатором КА, проведения обучения специалистов в режиме имитации в различных временных масштабах, отработке и испытаний аппаратных и программных средств управления полетами и бортовой аппаратуры и научных приборов. Комплекс дистанционного управления космическим аппаратом построен на основе трансивера IC-9100; антеннофидерных устройств, опорно-поворотных устройств с блоком управления, управляющего персонального компьютера (ПК) с программным обеспечением (ПО); источника бесперебойного питания; модуля управления КДУ для отработки оборудования совместно с имитатором КА (основного модуля КДУ на основе операционной системы (ОС) Linux и резервного модуля КДУ на основе операционной системы Windows).
Имитатор КА имеет негерметичное исполнение, вертикальную компоновку и состоит из модулей имитирующих работу основных бортовых систем КА: системы энергоснабжения; системы связи; системы управления, сбора и обработки данных и интерфейсов подключения модуля отрабатываемого оборудования. Он предназначен для решения задач: управления имитатором, проведения обучения специалистов в режиме имитации в различных временных масштабах, отработке и испытаний аппаратных и программных средств управления полетом бортовой аппаратуры и научных приборов. Основные функциональные модули имитатора космического аппарата расположены на электронных печатных платах и выполнены по стандарту CubeSat. Этот стандарт предполагает, что все основные платы электронных модулей выполнены в одном форм-факторе и могут объединяться в стек (единая физическая шина) с помощью разъемов PC-104. Имитатор КА работает в следующих режимах: аварийный - режим, в который КА автоматически переходит при аппаратном сбое; минимального энергопотребления - режим, при котором передаются только основная телеметрия, переход осуществляется при низком заряде аккумуляторных батарей; штатный режим; режим работы с научной аппаратурой; режим работы с отрабатываемым оборудованием.
АРМ оператора анализа и управления КА решает следующие задачи: составления планов отработки бортовых систем имитатора и отрабатываемого оборудования; контроля выполнения процесса программы отработки и подготовки материалов для выпуска отчетов; контроля прохождения и исполнения управляющих команд на отдельные бортовые системы имитатора КА в процессе отработки; выдачи предложений по использованию отрабатываемой бортовой аппаратуры и полезной нагрузки; учета наработки бортовой аппаратуры и полезной нагрузки.
АРМ оператора НБО полета КА обеспечивает выполнение функций: отработки процессов первичной обработки информации, поступающей от аппаратуры навигации и ориентации; отработки приема и обработки баллистико-навигационной информации для определения положения центра масс КА; прогнозирования параметров движения центра масс и элементов орбиты КА; моделирования параметров углового движения КА; моделирования расчета трассы полета и зон радиовидимости наземных средств; обеспечения ПАС ЛО стандартной баллистической информацией.
АРМ приема и обработки информации телеметрии и целевой аппаратуры КА в каждый момент времени должен обладать наиболее полной и достоверной информацией о техническом состоянии имитатора КА и отрабатываемого оборудования для оперативного принятия решений. Основными задачами, которые решает АРМ являются прием и обработка телеметрической информации (ТМИ) бортовых систем (БС) и отрабатываемого оборудования КА; мониторинг работоспособности имитатора КА и отрабатываемого оборудования; подготовка команд управления для имитатора КА; оценка состояния бортовых систем и целевой аппаратуры; архивирование необработанной и обработанной ТМИ БС и отрабатываемого оборудования; обеспечение доступа к архивной информации через локальную и внешние сети.
АРМ технической поддержки решает задачи: интеграции АРМ в единую коммуника- ционно-информационную среду; разработка и поддержание локальной сети АРМ для упрощения процедуры обмена и повышения надежности; организация коллективной работы АРМ
61
совместно с внешними участниками проекта отработки бортового оборудования и целевой аппаратуры КА на основе WEB-технологий и технологий социальных сетей; разработка и обновление базы данных бортовой аппаратуры имитатора и отрабатываемого оборудования; сопровождение и поддержка общесистемного ПО и общего ПО АРМ.
В тестовом режиме в качестве отрабатываемого оборудования в имитаторе КА ПАС ЛО выступали навигационный приемник МНП-М7 и дублирующий навигационный приемник на основе промышленного GPS-модуля Ublox NEO-6M. Перед тестированием АРМ оператора анализа и управления КА отправляет заявку в АРМ оператора НБО полета КА на выдачу данных прогнозирования параметров орбиты навигационных КА, параметров навигационных сигналов на момент времени проведения эксперимента для заданных координат антенны навигационного приемника, как показано на рис. 1. После получения данных от АРМ оператора НБО полета КА, пример которых приведен на рис. 2, в управляющем ПК КДУ формируется команда управления «Перейти в режим работы с отрабатываемым оборудованием», привязанная ко времени и дате выполнения и передается пакет командной информации на имитатор КА.
После выполнения имитатором команды управления на КДУ приходят ответные квитанции о выполнении команды и пакеты телеметрии, как по бортовым системам имитатора КА так и по навигационному приемнику (НП), которые декодируются и в закладке Отраб. оборуд. 1(1) панели содержания пакетов ТМИ управляющего ПК КДУ, появится, ТМИ по навигационному приемнику МНП-М7: долгота; широта; высота положения антенны навигационного приемника; количество видимых спутников; качество обсервации; время, синхронизированное по сигналам навигационных спутников.
Аналогичные пакеты телеметрии будут отправлены на удаленный серверсайт данных бортовой аппаратуры имитатора КА и отрабатываемого оборудования и будут доступны внешнему пользователю из сети Интернет. С помощью команды управления «а», посылаемой на имитатор КА, можно получить дополнительные пакеты телеметрии от навигационного приемника: номер видимого спутника систем GPS и GLONASS, азимут и угол места видимого навигационного спутника), как показано на рис. 3.
Декодированная ТМИ по бортовому оборудованию имитатора КА и по навигационному приемнику передается на хранение на локальный сервер - базу данных бортовой аппаратуры имитатора и отрабатываемого оборудования и на дальнейшую обработку в АРМ приема и обработки информации телеметрии и целевой аппаратуры КА. После обработки она поступает на локальный сервер и в АРМ оператора НБО полета КА для расчета ошибок параметров орбиты навигационных КА, параметров навигационных сигналов экспериментальных данных по отношению к расчетным. Результаты обработки данных отрабатываемого навигационного приемника передаются на АРМ оператора анализа и управления КА АРМ оператора анализа и управления КА для анализа, ведения протокола и принятия решений по дальнейшему проведению эксперимента по отработке. Кроме того для АРМ приема и обработки информации телеметрии и целевой аппаратуры КА существует резервный канал получения ТМИ по бортовому оборудованию имитатора КА и навигационному приемнику через сеть Интернет с сайта данных бортовой аппаратуры имитатора КА и отрабатываемого оборудования.
62
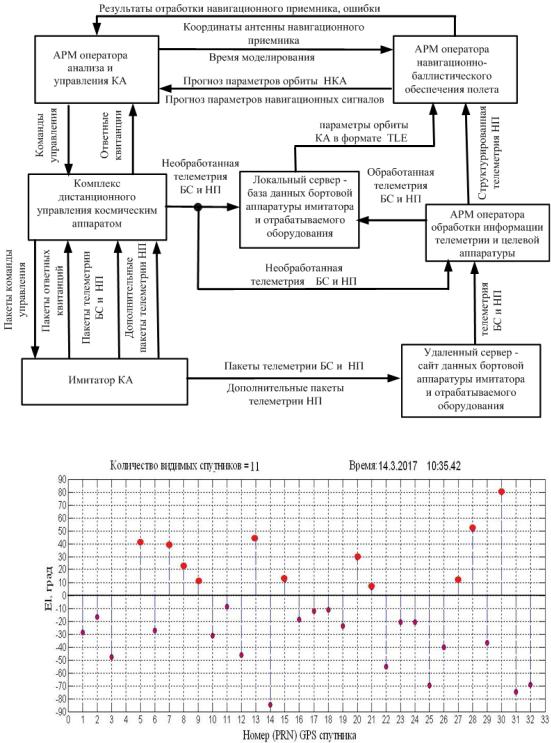
Рис. 1. Взаимодействие ПАС ЛО в цикле отработки навигационного приемника
Рис. 2. Расчетные данные по углу места (El) навигационного КА в зависимости от номера ПСП (PRN) GPS спутника (крупные кружки - видимые навигационные КА)
63

Рис. 3. Экспериментальные данные по углу места и азимуту навигационных спутников, полученные с помощью отрабатываемого навигационного приемника MНП-М7
Также проводился эксперимент по отработки живучести навигационного приемника – подключение резервного навигационный приемник Ublox NEO-6M. На панели управления имитатором ГИП КДУ в окне идентификатора оборудования выбирался идентификатор gpsb (навигационный приемник МНП-М7) и кнопкой «Выключить» отправлялась команда на отключение навигационного приемника МНП-М7 на имитатор космического аппарата. На панели управления имитатором ГИП КДУ выбирался в окне идентификатор gpsa (навигационный приемник Ublox NEO-6M) и кнопкой «Включить» отправлялась команда на включение навигационного приемника Ublox NEO-6M на имитатор космического аппарата. После выполнения команды от имитатора приходил короткий ответный пакет о выполнении команды подключения навигационного приемника Ublox NEO-6M, который отображалась на панели управления имитатором ГИП управляющего компьютера КДУ. В окне содержания пакетов телеметрии ГИП управляющего компьютера КДУ отображалась телеметрия по навигационному приемнику Ublox NEO-6M: долгота и широта местоположения имитатора КА, количество видимых спутников. С помощью команды управления «а», посылаемой на имитатор КА, можно получить дополнительные пакеты телеметрии от навигационного приемника: номер видимого спутника системы GPS, азимут и угол места видимого навигационного спутника), как показано на рис. 4. Навигационные приемники могут работать и совместно, тогда бортовое время имитатора КА синхронизируется по времени основного НП МНП-М7.
Рис. 4. Экспериментальные данные по углу места и азимуту навигационных спутников, полученные с помощью отрабатываемого навигационного приемника Ublox NEO-6M
На примере тестирования навигационного приемника показано, что разработанные
64
ПАС ЛО нано и пикоспутников при взаимодействии позволяют решать задачи отработки управления КА, бортового оборудования КА и аппаратуры целевой нагрузки, бортового про- граммно-математического обеспечения. Кроме того их внедрение в учебный процесс БГУ позволит улучшить качество подготовки специалистов аэрокосмической отрасли.
Белорусский государственный университет, г. Минск, Республика Беларусь
A.A.Spiridonov, V.A. Saechnikov, I.A. Shalatonin, D.N. Grin, V.V. Dоmbrovski,
A.A.Dubovik, Y.V. Kazaryna
THE USAGE OF THE SOFTWARE AND HARDWARE FOR LABORATORY TESTING OF NANOSATELLITES AND PICOSATELLITES FOR EQUIPMENT TESTING
The usage of software and hardware for laboratory testing of nanosatellites and picosatellites in the cycle of equipment testing are considered. GPS receiver testing are considered as example of the software and hardware interaction
Key words: small satellite, navigation receiver, nanosatellite
Belarusian State University, Minsk, Belarus
УДК 629.76
А.А. Дубовик, Ю.В. Казарина, А.А. Спиридонов
БАЗА ДАННЫХ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ МАЛОГО КОСМИЧЕСКОГО АППАРАТА
Рассматривается создание базы данных телеметрической информации малого космического аппарата. Описывается вторичная обработка телеметрии. Данные магнитометра космического аппарата Bugsat 1 сравниваются с модельными данными магнитного поля Земли
Ключевые слова: малый космический аппарат, телеметрия, база данных
Все малые космические аппараты (МКА) имеют в составе своей бортовой аппаратуры блок телеметрии, который собирает информацию о работе систем спутника и по радиоканалу отправляет полученные данные, которые впоследствии проходят несколько этапов обработки: декодирование и тематическая обработка. Для успешного осуществления этих стадий необходимо решить задачу накопления и хранения телеметрической информации. Как известно, принимаемой информации за время радиовидимости недостаточно для качественной оценки и прогнозирования состояния космического аппарата. Подобная проблема решается путем создания базы данных (БД), и, как следствие, могут быть решены такие проблемы, как быстрая проверка работоспособности датчиков телеметрии по моделям околоземного пространства, полетной калибровки датчиков системы ориентации, анализ данных телеметрии в различные интервалы времени и в любых точках орбиты. Базы данных обладают рядом преимуществ:
-организация поиска;
-сортировка;
-реализация отбора данных.
В БД предусмотрена эффективная организация хранения информации, минимизирующая время доступа и поиска, что важно для оперативного анализа внештатных ситуаций. Телеметрия до записи в базу данных подвергается ряду изменений. Телеметрический пакет декодируется, полученная «сырая» информация разделяется на четыре блока, блок-схема разделения, представленная на рис. 1:
-система электроснабжения;
-бортовой компьютер;
-подсистема контроля и определения ориентации;
65

- полезная нагрузка.
Рис. 1. Блок-схема разделения телеметрии (EPS(Electric Power Systems - система электроснабжения), OBC (On-Board Computer) - бортовой компьютер , ADCS (Attitude De-
termination and Control System) - подсистема контроля и определения ориентации, Payload - полезная нагрузка)
Подобное разделение позволит производить обработку и анализ данных по отдельным подсистемам космического аппарата, увеличить быстродействие реализуемых запросов, исключить возможность возникновения ошибки дублирования данных. В качестве примера на рис. 2 представлен пользовательский интерфейс, реализованной базы данных.
Рис. 2. Пользовательский интерфейс, разработанной базы данных
Следующим этапом является тематическая обработка, которая включает в себя:
-сравнение измерений датчиков с модельными значениями физических параметров (например, данные магнитометра с данными модельного поля Земли);
-калибровка данных солнечного датчика и магнитометра по телеметрическим данным
сучетом данных других датчиков КА;
-оценка точности показаний датчиков;
-оперативный анализ полетной ситуации КА (определение ошибок в потоке телеметрии, диапазона изменений телеметрических параметров заданного интервала времени, при-
66

вязка телеметрических данных к орбитальным параметрам и различным системам координат);
-выявление и оповещение о наличии внештатных ситуаций в работе бортовых систем космического аппарата;
-определение ориентации КА.
Программный модуль по обработке данных магнитометра КА включает в себя:
-блок ввода данных, реализующий сбор данных магнитометра и орбитальных данных
вформате TLE. Осуществляется проверка выполнения условия: разность между временем данных магнитометра и временем эпохи TLE должно быть меньше суток;
-блок определение вектора-состояния. По модели усредненного возмущающего движения рассчитывается вектор-состояния КА на данном временном интервале с переменным шагом данных телеметрии;
-блок нахождения вектора магнитной индукции,в качестве модели магнитного поля Земли использовалась дипольная модель;
-блок вывода результатов моделирования и данных магнитометра, определение ошибки. В качестве примера на рис. 3 представлен вектор ошибок модуля вектора магнитной индукции (модели и магнитометра).
Рис. 3. Вектор ошибок модуля вектора магнитной индукции (модели и магнитометра)
Было проведено сравнение данных магнитометра КА Bugsat 1 с модельными данными магнитного поля Земли. По экспериментальным данным рассчитывался модуль вектора магнитной индукции магнитометра.
Вкачестве модели была использована дипольная модель магнитного поля Земли, которая является грубым приближением реального поля Земли, но позволяющая качественно анализировать работу магнитометра. С использованием начальных орбитальных данных КА
вформате TLE и упрощенной модели возмущенного движения КА, был вычислен модуль вектора магнитной индукции дипольной модели. Результаты сравнения представлены на рис. 4.
Врезультате был разработан программный модуль по обмену данными между базой данной и ПО, который позволяет проводить выборку данных для обработки по конкретному датчику за произвольный интервал времени и передавать данные в программный модуль по вторичной обработке телеметрии. Также реализован программный модуля по обработке данных магнитометра КА, который позволяет проводить сравнение данных магнитометра с данными модели магнитного поля Земли, определяет ошибки в измерениях датчика, проводит коррекцию и калибровку магнитометра.
Результаты работы программного модуля по обработке данных магнитометра КА
67

Bugsat 1 показали, что дальнейшее усовершенствование должно быть связано более точной обработкой данных датчика магнитного поля с учетом постоянных и переменных во времени смещений показаний по каждой из трех осей с учетом влияния различных источников ошибок (наличие постоянного магнита на борту, ошибок мягкого и твердого железа, цепи постоянного тока, из-за изменения ориентации аппарата при взаимодействии магнитного момента спутника с магнитным полем Земли).
Созданная база данных телеметрической информации малого космического аппарата используются в лабораторном практикуме «Система телеметрического контроля СМКА. Прием и обработка телеметрии СМКА» при обучении студентов аэрокосмических специальностей Белорусского государственного университета. Полученный опыт, полученный при разработке базы данных телеметрической информации малого космического аппарата, используется в настоящее время в рамках работ по созданию программно-аппаратные средств для лабораторной отработки бортовой аппаратуры нано и пикоспутников по программе Мо- ниторинг-СГ при создании базы данных для вторичной обработки телеметрии бортовых систем имитатора КА.
Рис. 4. Модуль вектора магнитной индукции (модели и магнитометра)
Белорусский государственный университет, г. Минск, Республика Беларусь
A.A. Dubovik, Y.V. Kazaryna, A.A. Spiridonov
TELEMETRY DATABASE OF SMALL SATELLITE
The development of small satellite telemetry database is considered. The secondary processing of telemetry is described. The magnetometer data of spacecraft Bugsat 1 are compared with the model data of the Earth's magnetic field
Key words: small satellite, telemetry, database
Belarusian State University, Minsk, Belarus
68
УДК 631.4:556.314 (470.324)
В.Л. Бочаров, Д.С. Трубицын, Ю.А. Устименко
ЭКОЛОГИЧЕСКИЙ МОНИТОРИНГ ИСТОЧНИКОВ ПИТЬЕВОГО ВОДОСНАБЖЕНИЯ В РАЙОНЕ НОВОХОПЕРСКИХ МЕДНО-НИКЕЛЕВЫХ МЕСТОРОЖДЕНИЙ (ВОРОНЕЖСКАЯ ОБЛАСТЬ)
Разработана схема мониторинга подземных вод Новохоперского никеленосного района, используемых для хозяй- ственно-питьевого водоснабжения. Установлено, что их качественный состав в период наблюдений 2014-2017 гг. ни по одному из наблюдаемых компонентов не вышел за пределы установленного санитарными нормами и правилами
Ключевые слова: экология, мониторинг, подземные воды, минерализация, гидрохимический режим, водоносный комплекс
Подземные воды Новохоперского никеленосного района сосредоточены в четырех водоносных комплексах (сверху вниз): неоген-четвертичном, меловом, девонском и архейпротерозойском. Водоносные комплексы отделены друг от друга водоупорами; гидрогеологические окна отсутствуют. Водоотбор к настоящему времени на хозяйственно-питьевые нужды распределен следующим образом (тыс. м3/сут): неоген-четвертичный – 11,7, меловой
– 2,17, девонский – 0,26, архей-протерозойский – 0,05. Общий водоотбор составляет 13,51 тыс. м3/сут, из которого более 85 % приходится на самый верхний неоген-четвертичный водоносный комплекс [1].
Подземные воды девонского комплекса, характеризующиеся высокой минерализацией, для нужд хозяйственно-питьевого водоснабжения используются крайне ограниченно. Возможность проникновения этих вод в верхние водоносные горизонты и комплексы на месторождениях практически исключена из-за отсутствия гидрогеологических окон и наличия достаточно мощных водоупорных горизонтов.
Возможность поступления загрязняющих веществ в продуктивные водоносные горизонты и комплексы в процессе геологоразведочных работ также исключается при своевременном тампонаже скважин и изоляции околоскважинных пространств. Гидродинамический режим, по предварительным данным, сохранится в естественном виде, поскольку дополнительный водоотбор из продуктивных водоносных горизонтов и комплексов в процессе геологической разведки нецелесообразен.
На основании авторских исследований с привлечением обширного фондового и опубликованного материала предыдущих исследований определен фоновый химический состав пресных подземных вод верхнего структурно-гидрогеологического этажа, включающего неоген-четвертичный и меловой водоносные комплексы (табл. 1).
Эти воды по своему качеству соответствуют требованиям, предъявляемым установленным нормам и правилам санитарно-эпидемиологического контроля к объектам хозяйст- венно-питьевого водоснабжения. Они устойчивы в гидрогеохимическом отношении и полностью пригодны для удовлетворения потребностей населения [2].
В связи с началом геологоразведочных работ на сульфидных медно-никелевых месторождениях Новохоперского района была построена сеть гидрогеохимического мониторинга, включающая семь наблюдательных пунктов, расположенных в населенных пунктах вокруг Еланского и Елкинского участков, образующих внутренний контур мониторинга (рисунок). Сведения о наблюдательных пунктах представлены в табл. 2. Результаты мониторинга по главным типообразующим компонентам химического состава подземных вод за 2016 год приведены в табл. 3, по микроэлементам – в табл. 4.
Сопоставление ранее полученных результатов с фондовыми материалами свидетельствует о сохранении общих закономерностей в формировании и распределении химических типов подземных вод. В естественных природных условиях формируются воды HCO3CaMg, HCO3SO4CaNa, HCO3ClCaNa и HCO3ClSO4CaNa типов. Ведущая роль в типообразовании
69
принадлежит гидрокарбонат аниону, кальцию и натрию. Наиболее характерными величинами минерализации, которые могут быть приняты в качестве фоновых, являются – 0,3-0,5 г/дм3 для мелового водоносного комплекса и 0,5-0,7 г/дм3 для неоген-четвертичного водоносного комплекса. Это неудивительно, поскольку пробы воды отбирались по наблюдательным гидрогеологическим скважинам, расположенным вне населенных пунктов.
Таким образом, подземные воды неоген-четвертичного и мелового водоносных комплексов в природном состоянии района Новохоперского месторождения сульфидно-медно- никелевых руд в целом соответствуют требованиям, предъявляемым установленным нормам и правилам санитарно-эпидемиологического контроля. Они устойчивы в гидрогеохимическом отношении и пригодны для удовлетворения потребностей в питьевом водоснабжении.
Совсем иная ситуация складывается при анализе данных мониторинга по колодцам в населенных пунктах по периметру горного отвода месторождений. В 2016 году в колодцах населенных пунктов при сохранении установленного соотношения типообразующих компонентов подземные воды неоген-четвертичного водоносного комплекса, используемого для хозяйственно-питьевого водоснабжения, наблюдалось заметное повышение против ПДК концентраций щелочных металлов, гидрокарбонат аниона и особенно нитратов (табл. 3). Среди микроэлементов выделяются цинк, свинец и никель, превышающие значения ПДК на
20-30 %.
Подобная тенденция сохраняется и по результатам мониторинга в 2017 году: попрежнему сохраняется высокое содержание натрия, гидрокарбонат аниона, нитратов, жесткости (табл. 5 и 6). Среди микроэлементов практически полностью сохраняется уровень концентраций 2016 года. Важно отметить, что вода, отобранная из скважины пос. Елань-Колено характеризуется более устойчивым химическим составом: превышения ПДК только по гидрокарбонат аниону и нитратам.
Таким образом, можно считать, что геологоразведочные работы не оказали существенного негативного влияния на подземные воды, используемые для хозяйственно-питьевого водоснабжения. Источником загрязнения их являются поверхностные воды, формирующиеся в населенных пунктах и подверженные влиянию хозяйственно-бытовой деятельности населения.
70